 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNatural Multicontact Walking for Robotic Assistive Devices via Musculoskeletal Models and Hybrid Zero Dynamics
Paper and Code
Sep 10, 2021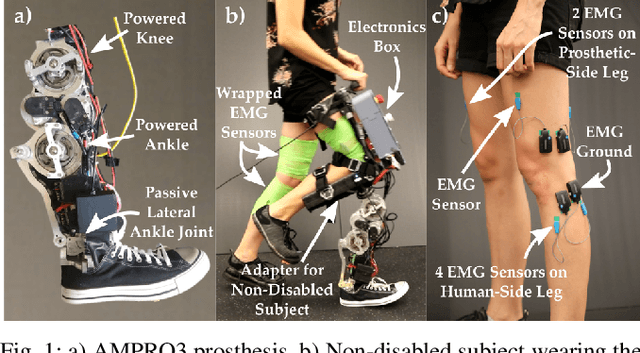
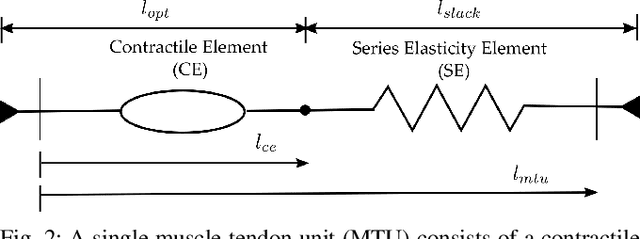
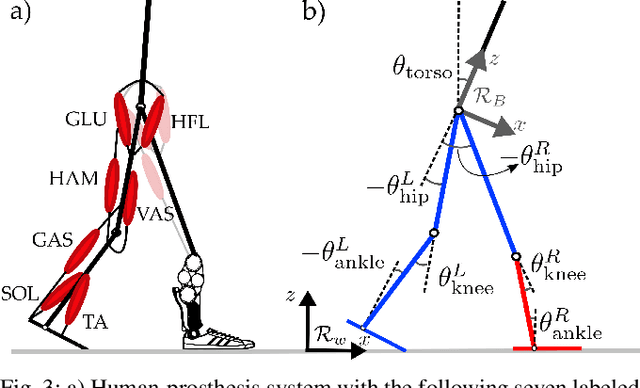
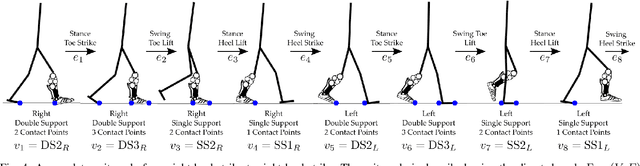
Generating provably stable walking gaits that yield natural locomotion when executed on robotic-assistive devices is a challenging task that often requires hand-tuning by domain experts. This paper presents an alternative methodology, where we propose the addition of musculoskeletal models directly into the gait generation process to intuitively shape the resulting behavior. In particular, we construct a multi-domain hybrid system model that combines the system dynamics with muscle models to represent natural multicontact walking. Stable walking gaits can then be formally generated for this model via the hybrid zero dynamics method. We experimentally apply our framework towards achieving multicontact locomotion on a dual-actuated transfemoral prosthesis, AMPRO3. The results demonstrate that enforcing feasible muscle dynamics produces gaits that yield natural locomotion (as analyzed via electromyography), without the need for extensive manual tuning. Moreover, these gaits yield similar behavior to expert-tuned gaits. We conclude that the novel approach of combining robotic walking methods (specifically HZD) with muscle models successfully generates anthropomorphic robotic-assisted locomotion.