 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInput-to-State Safe Backstepping: Robust Safety-Critical Control with Unmatched Uncertainties
Feb 03, 2026Guaranteeing safety in the presence of unmatched disturbances -- uncertainties that cannot be directly canceled by the control input -- remains a key challenge in nonlinear control. This paper presents a constructive approach to safety-critical control of nonlinear systems with unmatched disturbances. We first present a generalization of the input-to-state safety (ISSf) framework for systems with these uncertainties using the recently developed notion of an Optimal Decay CBF, which provides more flexibility for satisfying the associated Lyapunov-like conditions for safety. From there, we outline a procedure for constructing ISSf-CBFs for two relevant classes of systems with unmatched uncertainties: i) strict-feedback systems; ii) dual-relative-degree systems, which are similar to differentially flat systems. Our theoretical results are illustrated via numerical simulations of an inverted pendulum and planar quadrotor.
Walk the PLANC: Physics-Guided RL for Agile Humanoid Locomotion on Constrained Footholds
Jan 09, 2026Bipedal humanoid robots must precisely coordinate balance, timing, and contact decisions when locomoting on constrained footholds such as stepping stones, beams, and planks -- even minor errors can lead to catastrophic failure. Classical optimization and control pipelines handle these constraints well but depend on highly accurate mathematical representations of terrain geometry, making them prone to error when perception is noisy or incomplete. Meanwhile, reinforcement learning has shown strong resilience to disturbances and modeling errors, yet end-to-end policies rarely discover the precise foothold placement and step sequencing required for discontinuous terrain. These contrasting limitations motivate approaches that guide learning with physics-based structure rather than relying purely on reward shaping. In this work, we introduce a locomotion framework in which a reduced-order stepping planner supplies dynamically consistent motion targets that steer the RL training process via Control Lyapunov Function (CLF) rewards. This combination of structured footstep planning and data-driven adaptation produces accurate, agile, and hardware-validated stepping-stone locomotion on a humanoid robot, substantially improving reliability compared to conventional model-free reinforcement-learning baselines.
Distributionally Robust Imitation Learning: Layered Control Architecture for Certifiable Autonomy
Dec 19, 2025Imitation learning (IL) enables autonomous behavior by learning from expert demonstrations. While more sample-efficient than comparative alternatives like reinforcement learning, IL is sensitive to compounding errors induced by distribution shifts. There are two significant sources of distribution shifts when using IL-based feedback laws on systems: distribution shifts caused by policy error and distribution shifts due to exogenous disturbances and endogenous model errors due to lack of learning. Our previously developed approaches, Taylor Series Imitation Learning (TaSIL) and $\mathcal{L}_1$ -Distributionally Robust Adaptive Control (\ellonedrac), address the challenge of distribution shifts in complementary ways. While TaSIL offers robustness against policy error-induced distribution shifts, \ellonedrac offers robustness against distribution shifts due to aleatoric and epistemic uncertainties. To enable certifiable IL for learned and/or uncertain dynamical systems, we formulate \textit{Distributionally Robust Imitation Policy (DRIP)} architecture, a Layered Control Architecture (LCA) that integrates TaSIL and~\ellonedrac. By judiciously designing individual layer-centric input and output requirements, we show how we can guarantee certificates for the entire control pipeline. Our solution paves the path for designing fully certifiable autonomy pipelines, by integrating learning-based components, such as perception, with certifiable model-based decision-making through the proposed LCA approach.
Risk-Aware Safety Filters with Poisson Safety Functions and Laplace Guidance Fields
Oct 29, 2025Robotic systems navigating in real-world settings require a semantic understanding of their environment to properly determine safe actions. This work aims to develop the mathematical underpinnings of such a representation -- specifically, the goal is to develop safety filters that are risk-aware. To this end, we take a two step approach: encoding an understanding of the environment via Poisson's equation, and associated risk via Laplace guidance fields. That is, we first solve a Dirichlet problem for Poisson's equation to generate a safety function that encodes system safety as its 0-superlevel set. We then separately solve a Dirichlet problem for Laplace's equation to synthesize a safe \textit{guidance field} that encodes variable levels of caution around obstacles -- by enforcing a tunable flux boundary condition. The safety function and guidance fields are then combined to define a safety constraint and used to synthesize a risk-aware safety filter which, given a semantic understanding of an environment with associated risk levels of environmental features, guarantees safety while prioritizing avoidance of higher risk obstacles. We demonstrate this method in simulation and discuss how \textit{a priori} understandings of obstacle risk can be directly incorporated into the safety filter to generate safe behaviors that are risk-aware.
Hierarchical Reduced-Order Model Predictive Control for Robust Locomotion on Humanoid Robots
Sep 05, 2025As humanoid robots enter real-world environments, ensuring robust locomotion across diverse environments is crucial. This paper presents a computationally efficient hierarchical control framework for humanoid robot locomotion based on reduced-order models -- enabling versatile step planning and incorporating arm and torso dynamics to better stabilize the walking. At the high level, we use the step-to-step dynamics of the ALIP model to simultaneously optimize over step periods, step lengths, and ankle torques via nonlinear MPC. The ALIP trajectories are used as references to a linear MPC framework that extends the standard SRB-MPC to also include simplified arm and torso dynamics. We validate the performance of our approach through simulation and hardware experiments on the Unitree G1 humanoid robot. In the proposed framework the high-level step planner runs at 40 Hz and the mid-level MPC at 500 Hz using the onboard mini-PC. Adaptive step timing increased the push recovery success rate by 36%, and the upper body control improved the yaw disturbance rejection. We also demonstrate robust locomotion across diverse indoor and outdoor terrains, including grass, stone pavement, and uneven gym mats.
Compatibility of Multiple Control Barrier Functions for Constrained Nonlinear Systems
Sep 04, 2025

Control barrier functions (CBFs) are a powerful tool for the constrained control of nonlinear systems; however, the majority of results in the literature focus on systems subject to a single CBF constraint, making it challenging to synthesize provably safe controllers that handle multiple state constraints. This paper presents a framework for constrained control of nonlinear systems subject to box constraints on the systems' vector-valued outputs using multiple CBFs. Our results illustrate that when the output has a vector relative degree, the CBF constraints encoding these box constraints are compatible, and the resulting optimization-based controller is locally Lipschitz continuous and admits a closed-form expression. Additional results are presented to characterize the degradation of nominal tracking objectives in the presence of safety constraints. Simulations of a planar quadrotor are presented to demonstrate the efficacy of the proposed framework.
Safe Navigation under State Uncertainty: Online Adaptation for Robust Control Barrier Functions
Aug 26, 2025Measurements and state estimates are often imperfect in control practice, posing challenges for safety-critical applications, where safety guarantees rely on accurate state information. In the presence of estimation errors, several prior robust control barrier function (R-CBF) formulations have imposed strict conditions on the input. These methods can be overly conservative and can introduce issues such as infeasibility, high control effort, etc. This work proposes a systematic method to improve R-CBFs, and demonstrates its advantages on a tracked vehicle that navigates among multiple obstacles. A primary contribution is a new optimization-based online parameter adaptation scheme that reduces the conservativeness of existing R-CBFs. In order to reduce the complexity of the parameter optimization, we merge several safety constraints into one unified numerical CBF via Poisson's equation. We further address the dual relative degree issue that typically causes difficulty in vehicle tracking. Experimental trials demonstrate the overall performance improvement of our approach over existing formulations.
Hybrid Data-Driven Predictive Control for Robust and Reactive Exoskeleton Locomotion Synthesis
Aug 14, 2025Robust bipedal locomotion in exoskeletons requires the ability to dynamically react to changes in the environment in real time. This paper introduces the hybrid data-driven predictive control (HDDPC) framework, an extension of the data-enabled predictive control, that addresses these challenges by simultaneously planning foot contact schedules and continuous domain trajectories. The proposed framework utilizes a Hankel matrix-based representation to model system dynamics, incorporating step-to-step (S2S) transitions to enhance adaptability in dynamic environments. By integrating contact scheduling with trajectory planning, the framework offers an efficient, unified solution for locomotion motion synthesis that enables robust and reactive walking through online replanning. We validate the approach on the Atalante exoskeleton, demonstrating improved robustness and adaptability.
Locomotion on Constrained Footholds via Layered Architectures and Model Predictive Control
Jun 11, 2025Computing stabilizing and optimal control actions for legged locomotion in real time is difficult due to the nonlinear, hybrid, and high dimensional nature of these robots. The hybrid nature of the system introduces a combination of discrete and continuous variables which causes issues for numerical optimal control. To address these challenges, we propose a layered architecture that separates the choice of discrete variables and a smooth Model Predictive Controller (MPC). The layered formulation allows for online flexibility and optimality without sacrificing real-time performance through a combination of gradient-free and gradient-based methods. The architecture leverages a sampling-based method for determining discrete variables, and a classical smooth MPC formulation using these fixed discrete variables. We demonstrate the results on a quadrupedal robot stepping over gaps and onto terrain with varying heights. In simulation, we demonstrate the controller on a humanoid robot for gap traversal. The layered approach is shown to be more optimal and reliable than common heuristic-based approaches and faster to compute than pure sampling methods.
SHIELD: Safety on Humanoids via CBFs In Expectation on Learned Dynamics
May 16, 2025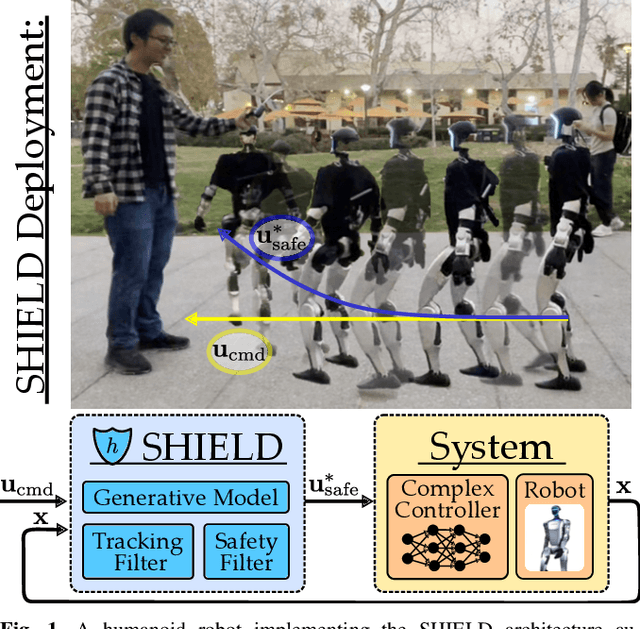
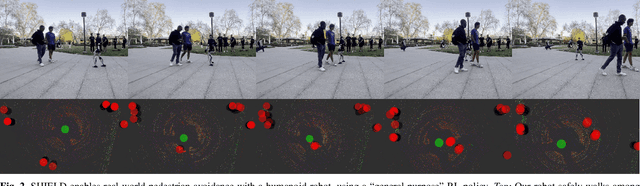
Robot learning has produced remarkably effective ``black-box'' controllers for complex tasks such as dynamic locomotion on humanoids. Yet ensuring dynamic safety, i.e., constraint satisfaction, remains challenging for such policies. Reinforcement learning (RL) embeds constraints heuristically through reward engineering, and adding or modifying constraints requires retraining. Model-based approaches, like control barrier functions (CBFs), enable runtime constraint specification with formal guarantees but require accurate dynamics models. This paper presents SHIELD, a layered safety framework that bridges this gap by: (1) training a generative, stochastic dynamics residual model using real-world data from hardware rollouts of the nominal controller, capturing system behavior and uncertainties; and (2) adding a safety layer on top of the nominal (learned locomotion) controller that leverages this model via a stochastic discrete-time CBF formulation enforcing safety constraints in probability. The result is a minimally-invasive safety layer that can be added to the existing autonomy stack to give probabilistic guarantees of safety that balance risk and performance. In hardware experiments on an Unitree G1 humanoid, SHIELD enables safe navigation (obstacle avoidance) through varied indoor and outdoor environments using a nominal (unknown) RL controller and onboard perception.