 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZero-order Control Barrier Functions for Sampled-Data Systems with State and Input Dependent Safety Constraints
Paper and Code
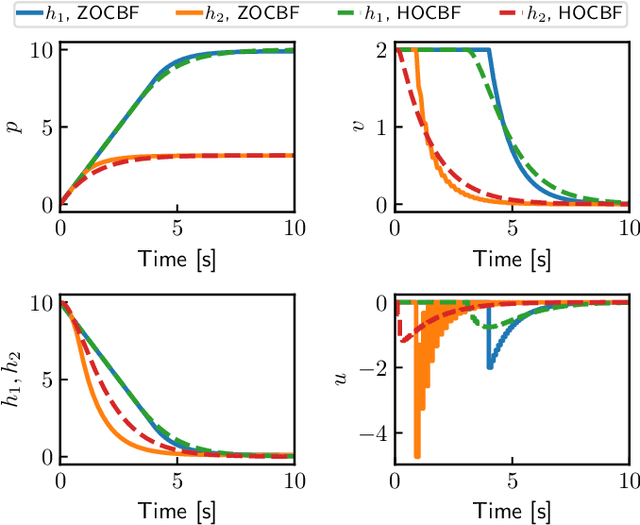
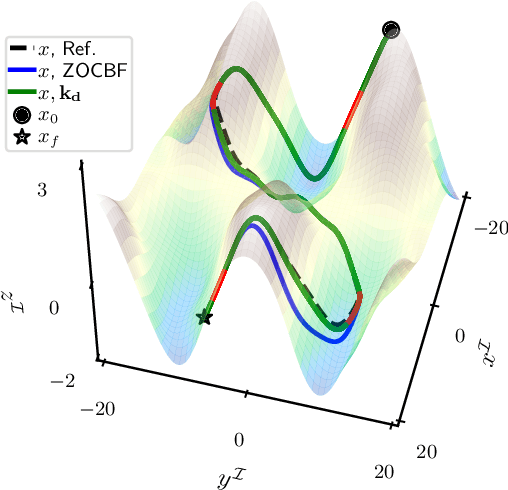
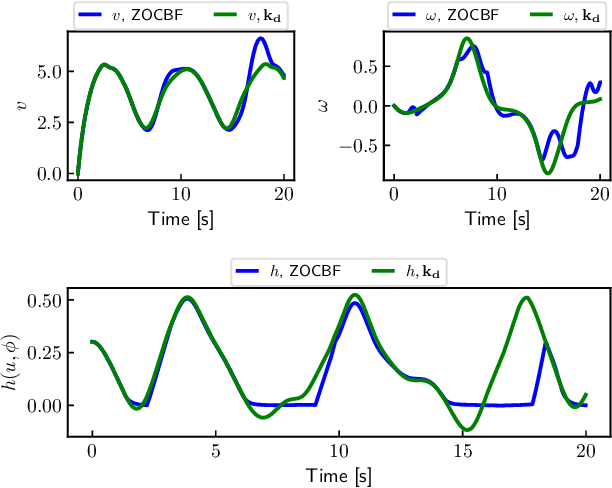
We propose a novel zero-order control barrier function (ZOCBF) for sampled-data systems to ensure system safety. Our formulation generalizes conventional control barrier functions and straightforwardly handles safety constraints with high-relative degrees or those that explicitly depend on both system states and inputs. The proposed ZOCBF condition does not require any differentiation operation. Instead, it involves computing the difference of the ZOCBF values at two consecutive sampling instants. We propose three numerical approaches to enforce the ZOCBF condition, tailored to different problem settings and available computational resources. We demonstrate the effectiveness of our approach through a collision avoidance example and a rollover prevention example on uneven terrains.