 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Navigation under State Uncertainty: Online Adaptation for Robust Control Barrier Functions
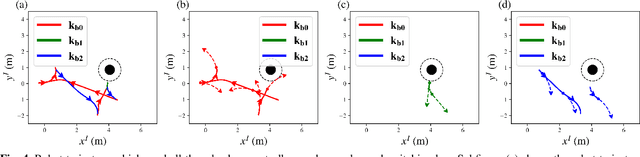
Aug 26, 2025Measurements and state estimates are often imperfect in control practice, posing challenges for safety-critical applications, where safety guarantees rely on accurate state information. In the presence of estimation errors, several prior robust control barrier function (R-CBF) formulations have imposed strict conditions on the input. These methods can be overly conservative and can introduce issues such as infeasibility, high control effort, etc. This work proposes a systematic method to improve R-CBFs, and demonstrates its advantages on a tracked vehicle that navigates among multiple obstacles. A primary contribution is a new optimization-based online parameter adaptation scheme that reduces the conservativeness of existing R-CBFs. In order to reduce the complexity of the parameter optimization, we merge several safety constraints into one unified numerical CBF via Poisson's equation. We further address the dual relative degree issue that typically causes difficulty in vehicle tracking. Experimental trials demonstrate the overall performance improvement of our approach over existing formulations.
AI Space Cortex: An Experimental System for Future Era Space Exploration
Jul 09, 2025Our Robust, Explainable Autonomy for Scientific Icy Moon Operations (REASIMO) effort contributes to NASA's Concepts for Ocean worlds Life Detection Technology (COLDTech) program, which explores science platform technologies for ocean worlds such as Europa and Enceladus. Ocean world missions pose significant operational challenges. These include long communication lags, limited power, and lifetime limitations caused by radiation damage and hostile conditions. Given these operational limitations, onboard autonomy will be vital for future Ocean world missions. Besides the management of nominal lander operations, onboard autonomy must react appropriately in the event of anomalies. Traditional spacecraft rely on a transition into 'safe-mode' in which non-essential components and subsystems are powered off to preserve safety and maintain communication with Earth. For a severely time-limited Ocean world mission, resolutions to these anomalies that can be executed without Earth-in-the-loop communication and associated delays are paramount for completion of the mission objectives and science goals. To address these challenges, the REASIMO effort aims to demonstrate a robust level of AI-assisted autonomy for such missions, including the ability to detect and recover from anomalies, and to perform missions based on pre-trained behaviors rather than hard-coded, predetermined logic like all prior space missions. We developed an AI-assisted, personality-driven, intelligent framework for control of an Ocean world mission by combining a mix of advanced technologies. To demonstrate the capabilities of the framework, we perform tests of autonomous sampling operations on a lander-manipulator testbed at the NASA Jet Propulsion Laboratory, approximating possible surface conditions such a mission might encounter.
Generative Predictive Control: Flow Matching Policies for Dynamic and Difficult-to-Demonstrate Tasks
Feb 19, 2025



Generative control policies have recently unlocked major progress in robotics. These methods produce action sequences via diffusion or flow matching, with training data provided by demonstrations. But despite enjoying considerable success on difficult manipulation problems, generative policies come with two key limitations. First, behavior cloning requires expert demonstrations, which can be time-consuming and expensive to obtain. Second, existing methods are limited to relatively slow, quasi-static tasks. In this paper, we leverage a tight connection between sampling-based predictive control and generative modeling to address each of these issues. In particular, we introduce generative predictive control, a supervised learning framework for tasks with fast dynamics that are easy to simulate but difficult to demonstrate. We then show how trained flow-matching policies can be warm-started at run-time, maintaining temporal consistency and enabling fast feedback rates. We believe that generative predictive control offers a complementary approach to existing behavior cloning methods, and hope that it paves the way toward generalist policies that extend beyond quasi-static demonstration-oriented tasks.
Zero-order Control Barrier Functions for Sampled-Data Systems with State and Input Dependent Safety Constraints
Nov 26, 2024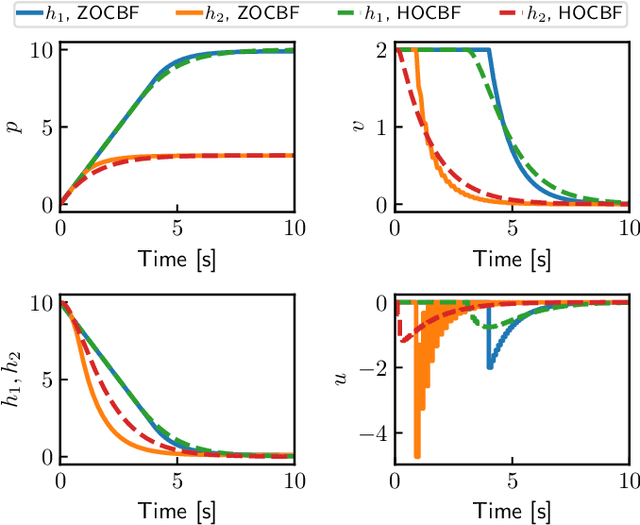
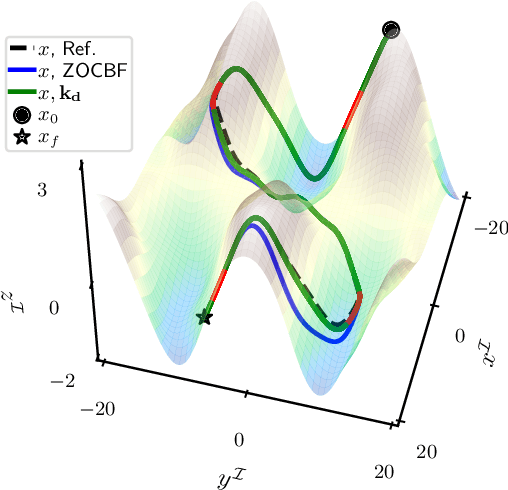
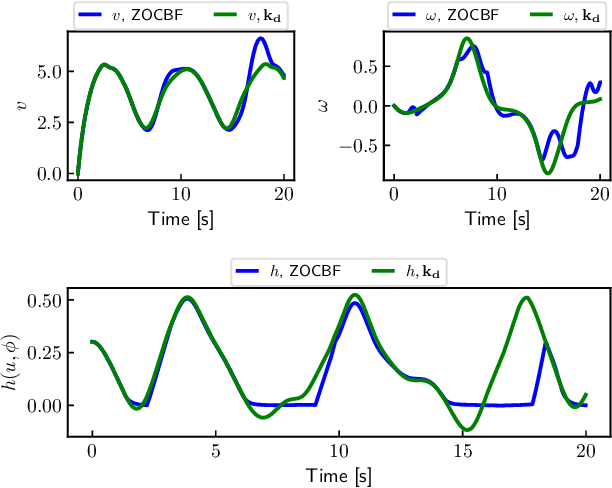
We propose a novel zero-order control barrier function (ZOCBF) for sampled-data systems to ensure system safety. Our formulation generalizes conventional control barrier functions and straightforwardly handles safety constraints with high-relative degrees or those that explicitly depend on both system states and inputs. The proposed ZOCBF condition does not require any differentiation operation. Instead, it involves computing the difference of the ZOCBF values at two consecutive sampling instants. We propose three numerical approaches to enforce the ZOCBF condition, tailored to different problem settings and available computational resources. We demonstrate the effectiveness of our approach through a collision avoidance example and a rollover prevention example on uneven terrains.
Equality Constrained Diffusion for Direct Trajectory Optimization
Oct 02, 2024



The recent success of diffusion-based generative models in image and natural language processing has ignited interest in diffusion-based trajectory optimization for nonlinear control systems. Existing methods cannot, however, handle the nonlinear equality constraints necessary for direct trajectory optimization. As a result, diffusion-based trajectory optimizers are currently limited to shooting methods, where the nonlinear dynamics are enforced by forward rollouts. This precludes many of the benefits enjoyed by direct methods, including flexible state constraints, reduced numerical sensitivity, and easy initial guess specification. In this paper, we present a method for diffusion-based optimization with equality constraints. This allows us to perform direct trajectory optimization, enforcing dynamic feasibility with constraints rather than rollouts. To the best of our knowledge, this is the first diffusion-based optimization algorithm that supports the general nonlinear equality constraints required for direct trajectory optimization.
Risk-Aware Robotics: Tail Risk Measures in Planning, Control, and Verification
Mar 27, 2024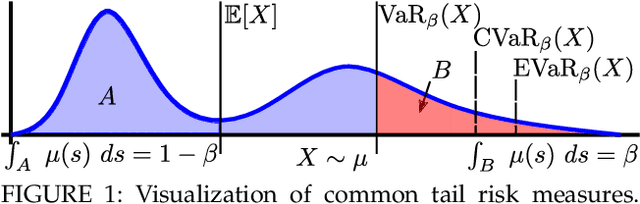
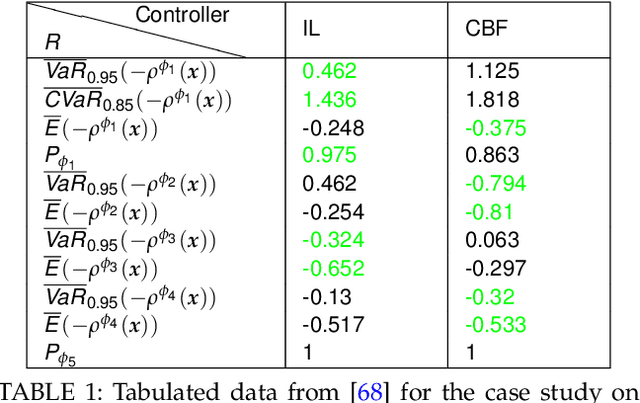
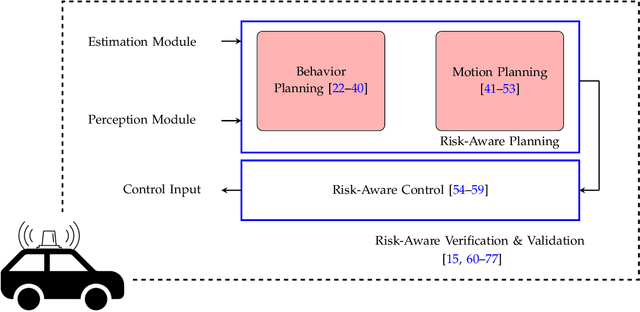
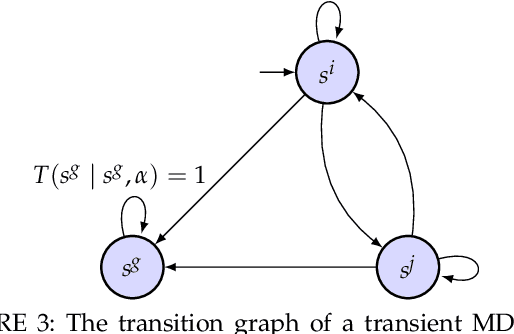
The need for a systematic approach to risk assessment has increased in recent years due to the ubiquity of autonomous systems that alter our day-to-day experiences and their need for safety, e.g., for self-driving vehicles, mobile service robots, and bipedal robots. These systems are expected to function safely in unpredictable environments and interact seamlessly with humans, whose behavior is notably challenging to forecast. We present a survey of risk-aware methodologies for autonomous systems. We adopt a contemporary risk-aware approach to mitigate rare and detrimental outcomes by advocating the use of tail risk measures, a concept borrowed from financial literature. This survey will introduce these measures and explain their relevance in the context of robotic systems for planning, control, and verification applications.
Rollover Prevention for Mobile Robots with Control Barrier Functions: Differentiator-Based Adaptation and Projection-to-State Safety
Mar 13, 2024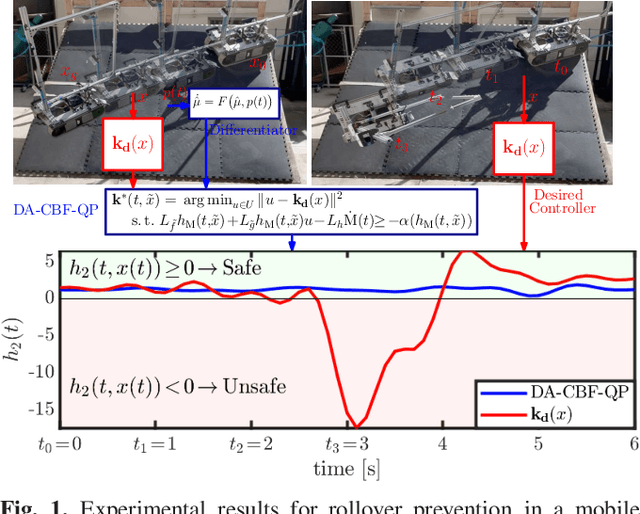
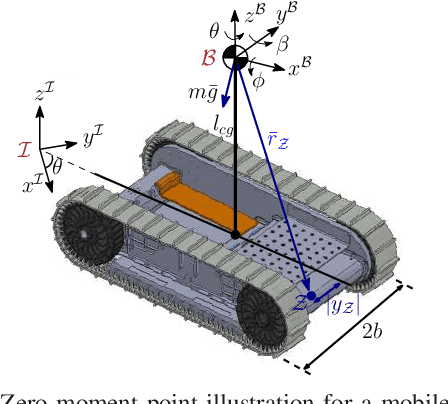
This paper develops rollover prevention guarantees for mobile robots using control barrier function (CBF) theory, and demonstrates these formal results experimentally. To this end, we consider a safety measure based on the zero moment point to provide conditions on the control input through the lens of CBFs. However, these conditions depend on time-varying and noisy parameters. To address this, we present a differentiator-based safety-critical controller that estimates these parameters and pairs Input-to-State Stable (ISS) differentiator dynamics with CBFs to achieve rigorous guarantees of safety. Additionally, to ensure safety in the presence of disturbance, we utilize a time-varying extension of Projection-to-State Safety (PSSf). The effectiveness of the proposed method is demonstrated through experiments on a tracked robot with a rollover potential on steep slopes.
A Safety-Critical Framework for UGVs in Complex Environments: A Data-Driven Discrepancy-Aware Approach
Mar 05, 2024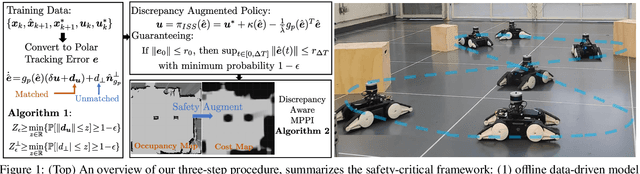
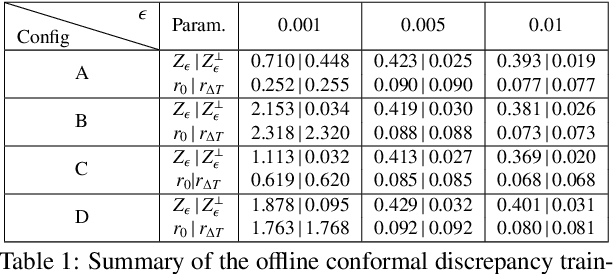
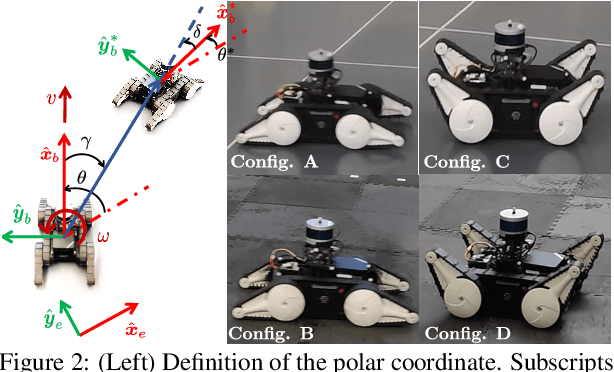
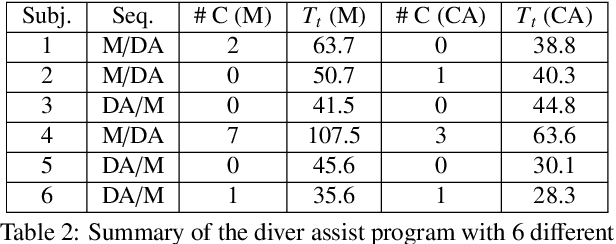
This work presents a novel data-driven multi-layered planning and control framework for the safe navigation of a class of unmanned ground vehicles (UGVs) in the presence of unknown stationary obstacles and additive modeling uncertainties. The foundation of this framework is a novel robust model predictive planner, designed to generate optimal collision-free trajectories given an occupancy grid map, and a paired ancillary controller, augmented to provide robustness against model uncertainties extracted from learning data. To tackle modeling discrepancies, we identify both matched (input discrepancies) and unmatched model residuals between the true and the nominal reduced-order models using closed-loop tracking errors as training data. Utilizing conformal prediction, we extract probabilistic upper bounds for the unknown model residuals, which serve to construct a robustifying ancillary controller. Further, we also determine maximum tracking discrepancies, also known as the robust control invariance tube, under the augmented policy, formulating them as collision buffers. Employing a LiDAR-based occupancy map to characterize the environment, we construct a discrepancy-aware cost map that incorporates these collision buffers. This map is then integrated into a sampling-based model predictive path planner that generates optimal and safe trajectories that can be robustly tracked by the augmented ancillary controller in the presence of model mismatches. The effectiveness of the framework is experimentally validated for autonomous high-speed trajectory tracking in a cluttered environment with four different vehicle-terrain configurations. We also showcase the framework's versatility by reformulating it as a driver-assist program, providing collision avoidance corrections based on user joystick commands.
Robust Control Barrier Functions using Uncertainty Estimation with Application to Mobile Robots
Jan 03, 2024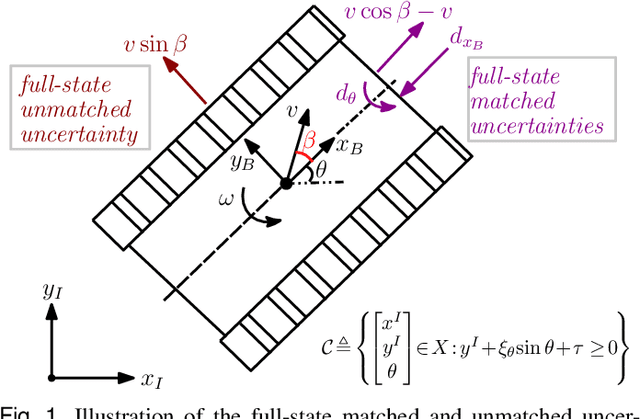
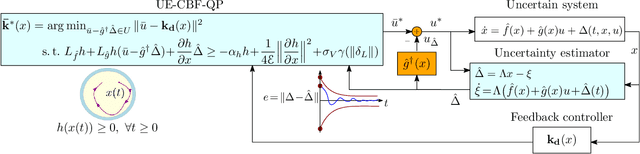
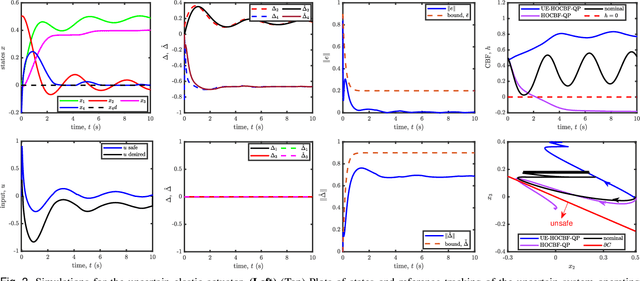
Model uncertainty poses a significant challenge to the implementation of safety-critical control systems. With this as motivation, this paper proposes a safe control design approach that guarantees the robustness of nonlinear feedback systems in the presence of matched or unmatched unmodelled system dynamics and external disturbances. Our approach couples control barrier functions (CBFs) with a new uncertainty/disturbance estimator to ensure robust safety against input and state-dependent model uncertainties. We prove upper bounds on the estimator's error and estimated outputs. We use an uncertainty estimator-based composite feedback control law to adaptively improve robust control performance under hard safety constraints by compensating for the matched uncertainty. Then, we robustify existing CBF constraints with this uncertainty estimate and the estimation error bounds to ensure robust safety via a quadratic program (CBF-QP). We also extend our method to higher-order CBFs (HOCBFs) to achieve safety under unmatched uncertainty, which causes relative degree differences with respect to control input and disturbance. We assume the relative degree difference is at most one, resulting in a second-order cone (SOC) condition. The proposed robust HOCBFs method is demonstrated in a simulation of an uncertain elastic actuator control problem. Finally, the efficacy of our method is experimentally demonstrated on a tracked robot with slope-induced matched and unmatched perturbations.
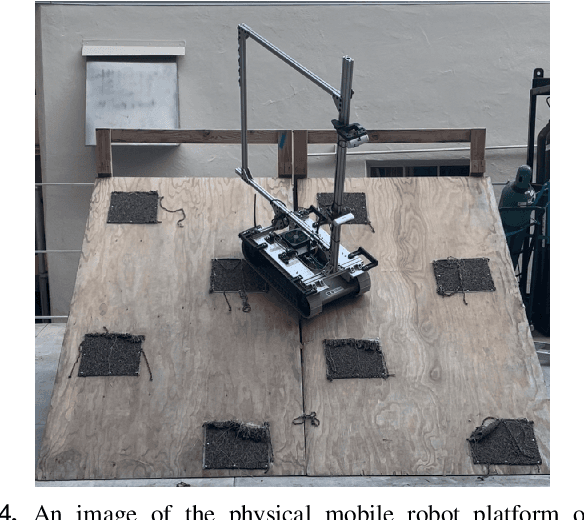
A Learning-Based Framework for Safe Human-Robot Collaboration with Multiple Backup Control Barrier Functions
Oct 09, 2023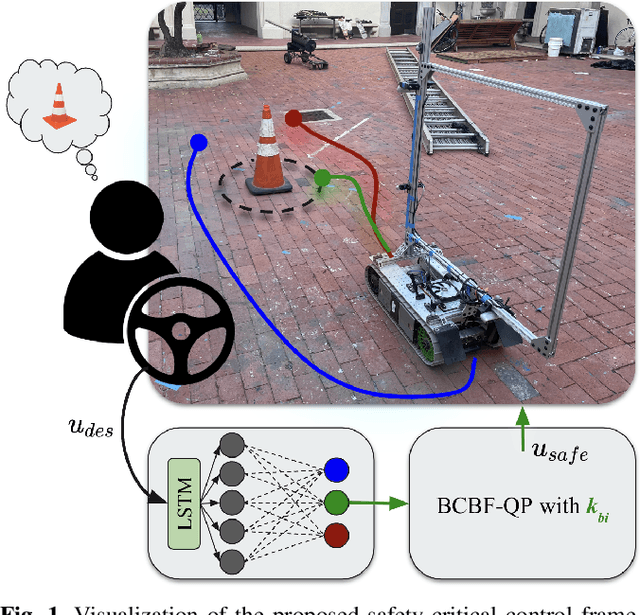
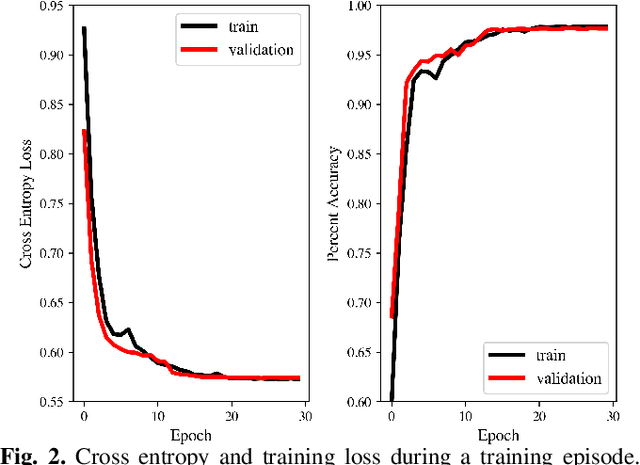
Ensuring robot safety in complex environments is a difficult task due to actuation limits, such as torque bounds. This paper presents a safety-critical control framework that leverages learning-based switching between multiple backup controllers to formally guarantee safety under bounded control inputs while satisfying driver intention. By leveraging backup controllers designed to uphold safety and input constraints, backup control barrier functions (BCBFs) construct implicitly defined control invariance sets via a feasible quadratic program (QP). However, BCBF performance largely depends on the design and conservativeness of the chosen backup controller, especially in our setting of human-driven vehicles in complex, e.g, off-road, conditions. While conservativeness can be reduced by using multiple backup controllers, determining when to switch is an open problem. Consequently, we develop a broadcast scheme that estimates driver intention and integrates BCBFs with multiple backup strategies for human-robot interaction. An LSTM classifier uses data inputs from the robot, human, and safety algorithms to continually choose a backup controller in real-time. We demonstrate our method's efficacy on a dual-track robot in obstacle avoidance scenarios. Our framework guarantees robot safety while adhering to driver intention.