 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWho Moved My Distribution? Conformal Prediction for Interactive Multi-Agent Systems
Nov 14, 2025Uncertainty-aware prediction is essential for safe motion planning, especially when using learned models to forecast the behavior of surrounding agents. Conformal prediction is a statistical tool often used to produce uncertainty-aware prediction regions for machine learning models. Most existing frameworks utilizing conformal prediction-based uncertainty predictions assume that the surrounding agents are non-interactive. This is because in closed-loop, as uncertainty-aware agents change their behavior to account for prediction uncertainty, the surrounding agents respond to this change, leading to a distribution shift which we call endogenous distribution shift. To address this challenge, we introduce an iterative conformal prediction framework that systematically adapts the uncertainty-aware ego-agent controller to the endogenous distribution shift. The proposed method provides probabilistic safety guarantees while adapting to the evolving behavior of reactive, non-ego agents. We establish a model for the endogenous distribution shift and provide the conditions for the iterative conformal prediction pipeline to converge under such a distribution shift. We validate our framework in simulation for 2- and 3- agent interaction scenarios, demonstrating collision avoidance without resulting in overly conservative behavior and an overall improvement in success rates of up to 9.6% compared to other conformal prediction-based baselines.
Risk-Aware Reinforcement Learning with Bandit-Based Adaptation for Quadrupedal Locomotion
Oct 16, 2025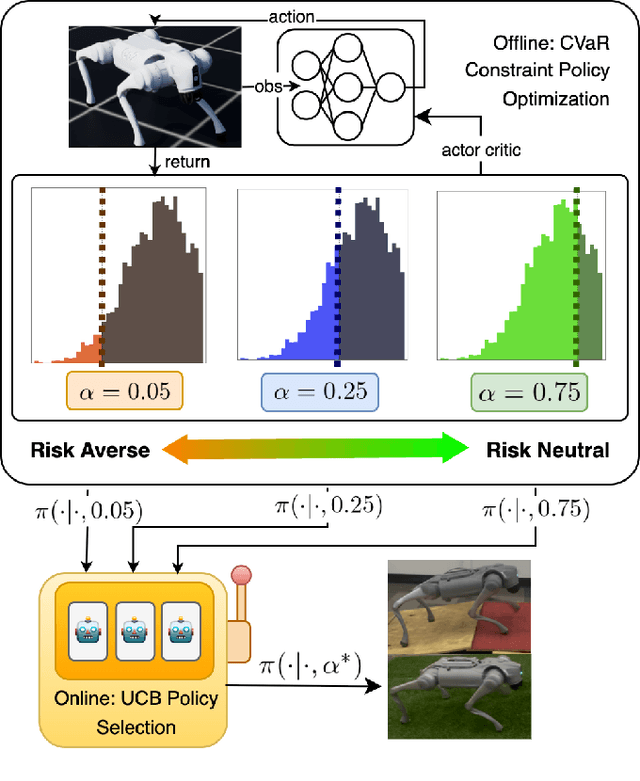
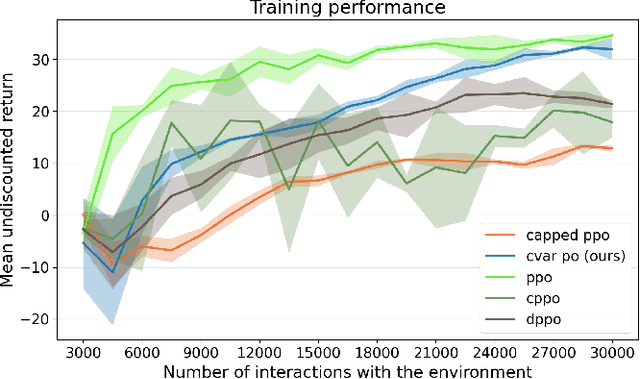
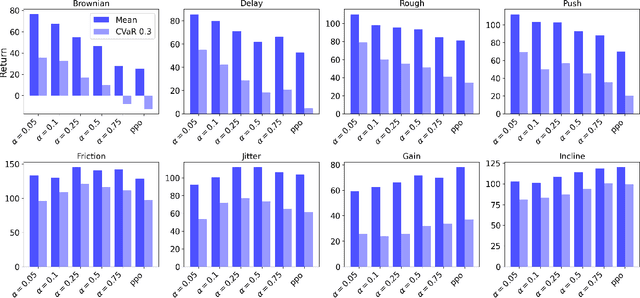
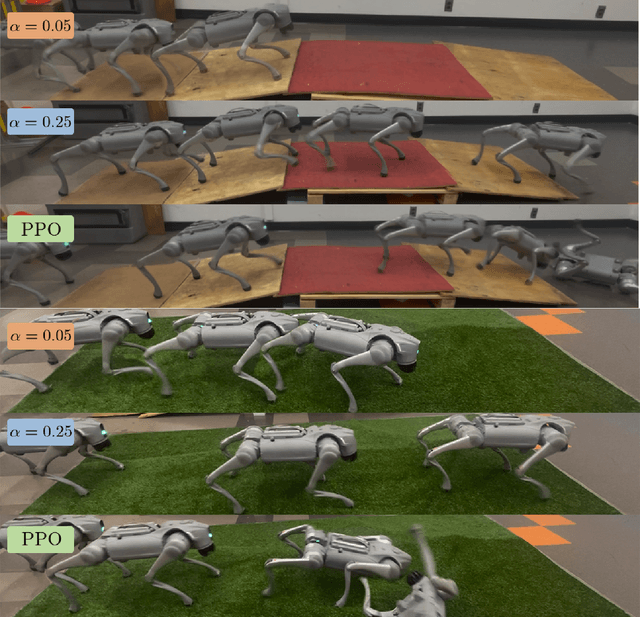
In this work, we study risk-aware reinforcement learning for quadrupedal locomotion. Our approach trains a family of risk-conditioned policies using a Conditional Value-at-Risk (CVaR) constrained policy optimization technique that provides improved stability and sample efficiency. At deployment, we adaptively select the best performing policy from the family of policies using a multi-armed bandit framework that uses only observed episodic returns, without any privileged environment information, and adapts to unknown conditions on the fly. Hence, we train quadrupedal locomotion policies at various levels of robustness using CVaR and adaptively select the desired level of robustness online to ensure performance in unknown environments. We evaluate our method in simulation across eight unseen settings (by changing dynamics, contacts, sensing noise, and terrain) and on a Unitree Go2 robot in previously unseen terrains. Our risk-aware policy attains nearly twice the mean and tail performance in unseen environments compared to other baselines and our bandit-based adaptation selects the best-performing risk-aware policy in unknown terrain within two minutes of operation.
Reliable and Scalable Robot Policy Evaluation with Imperfect Simulators
Oct 05, 2025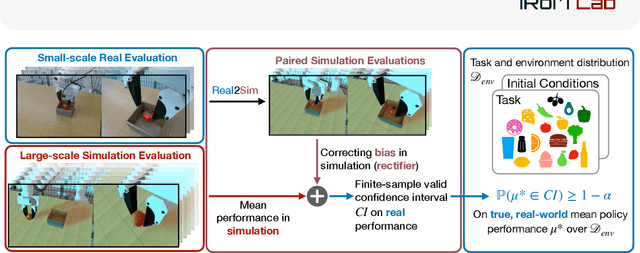

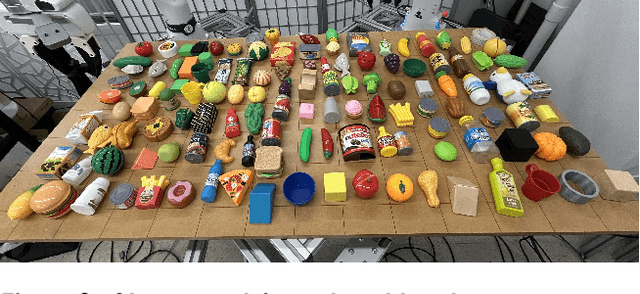

Rapid progress in imitation learning, foundation models, and large-scale datasets has led to robot manipulation policies that generalize to a wide-range of tasks and environments. However, rigorous evaluation of these policies remains a challenge. Typically in practice, robot policies are often evaluated on a small number of hardware trials without any statistical assurances. We present SureSim, a framework to augment large-scale simulation with relatively small-scale real-world testing to provide reliable inferences on the real-world performance of a policy. Our key idea is to formalize the problem of combining real and simulation evaluations as a prediction-powered inference problem, in which a small number of paired real and simulation evaluations are used to rectify bias in large-scale simulation. We then leverage non-asymptotic mean estimation algorithms to provide confidence intervals on mean policy performance. Using physics-based simulation, we evaluate both diffusion policy and multi-task fine-tuned \(\pi_0\) on a joint distribution of objects and initial conditions, and find that our approach saves over \(20-25\%\) of hardware evaluation effort to achieve similar bounds on policy performance.
An Addendum to NeBula: Towards Extending TEAM CoSTAR's Solution to Larger Scale Environments
Apr 18, 2025This paper presents an appendix to the original NeBula autonomy solution developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), participating in the DARPA Subterranean Challenge. Specifically, this paper presents extensions to NeBula's hardware, software, and algorithmic components that focus on increasing the range and scale of the exploration environment. From the algorithmic perspective, we discuss the following extensions to the original NeBula framework: (i) large-scale geometric and semantic environment mapping; (ii) an adaptive positioning system; (iii) probabilistic traversability analysis and local planning; (iv) large-scale POMDP-based global motion planning and exploration behavior; (v) large-scale networking and decentralized reasoning; (vi) communication-aware mission planning; and (vii) multi-modal ground-aerial exploration solutions. We demonstrate the application and deployment of the presented systems and solutions in various large-scale underground environments, including limestone mine exploration scenarios as well as deployment in the DARPA Subterranean challenge.
Risk-Aware Robotics: Tail Risk Measures in Planning, Control, and Verification
Mar 27, 2024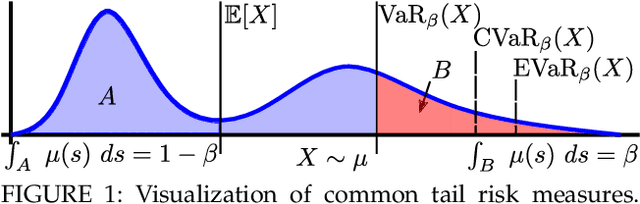
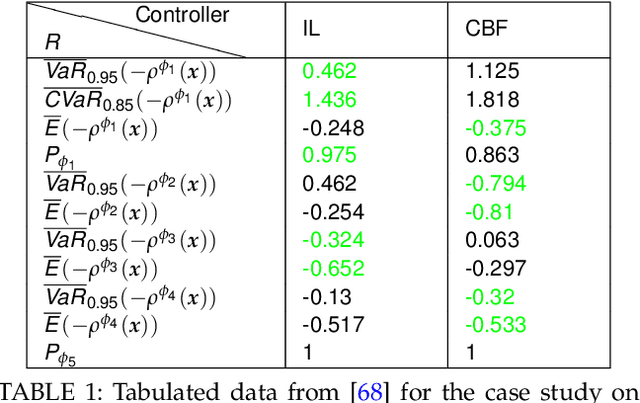
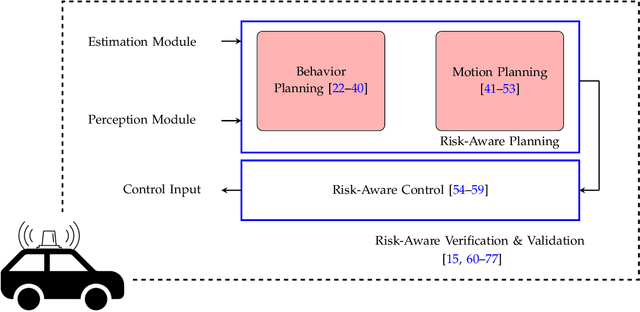
The need for a systematic approach to risk assessment has increased in recent years due to the ubiquity of autonomous systems that alter our day-to-day experiences and their need for safety, e.g., for self-driving vehicles, mobile service robots, and bipedal robots. These systems are expected to function safely in unpredictable environments and interact seamlessly with humans, whose behavior is notably challenging to forecast. We present a survey of risk-aware methodologies for autonomous systems. We adopt a contemporary risk-aware approach to mitigate rare and detrimental outcomes by advocating the use of tail risk measures, a concept borrowed from financial literature. This survey will introduce these measures and explain their relevance in the context of robotic systems for planning, control, and verification applications.
Explore until Confident: Efficient Exploration for Embodied Question Answering
Mar 23, 2024



We consider the problem of Embodied Question Answering (EQA), which refers to settings where an embodied agent such as a robot needs to actively explore an environment to gather information until it is confident about the answer to a question. In this work, we leverage the strong semantic reasoning capabilities of large vision-language models (VLMs) to efficiently explore and answer such questions. However, there are two main challenges when using VLMs in EQA: they do not have an internal memory for mapping the scene to be able to plan how to explore over time, and their confidence can be miscalibrated and can cause the robot to prematurely stop exploration or over-explore. We propose a method that first builds a semantic map of the scene based on depth information and via visual prompting of a VLM - leveraging its vast knowledge of relevant regions of the scene for exploration. Next, we use conformal prediction to calibrate the VLM's question answering confidence, allowing the robot to know when to stop exploration - leading to a more calibrated and efficient exploration strategy. To test our framework in simulation, we also contribute a new EQA dataset with diverse, realistic human-robot scenarios and scenes built upon the Habitat-Matterport 3D Research Dataset (HM3D). Both simulated and real robot experiments show our proposed approach improves the performance and efficiency over baselines that do no leverage VLM for exploration or do not calibrate its confidence. Webpage with experiment videos and code: https://explore-eqa.github.io/
Perceive With Confidence: Statistical Safety Assurances for Navigation with Learning-Based Perception
Mar 13, 2024



Rapid advances in perception have enabled large pre-trained models to be used out of the box for processing high-dimensional, noisy, and partial observations of the world into rich geometric representations (e.g., occupancy predictions). However, safe integration of these models onto robots remains challenging due to a lack of reliable performance in unfamiliar environments. In this work, we present a framework for rigorously quantifying the uncertainty of pre-trained perception models for occupancy prediction in order to provide end-to-end statistical safety assurances for navigation. We build on techniques from conformal prediction for producing a calibrated perception system that lightly processes the outputs of a pre-trained model while ensuring generalization to novel environments and robustness to distribution shifts in states when perceptual outputs are used in conjunction with a planner. The calibrated system can be used in combination with any safe planner to provide an end-to-end statistical assurance on safety in a new environment with a user-specified threshold $1-\epsilon$. We evaluate the resulting approach - which we refer to as Perceive with Confidence (PwC) - with experiments in simulation and on hardware where a quadruped robot navigates through indoor environments containing objects unseen during training or calibration. These experiments validate the safety assurances provided by PwC and demonstrate significant improvements in empirical safety rates compared to baselines.
Robots That Ask For Help: Uncertainty Alignment for Large Language Model Planners
Jul 04, 2023
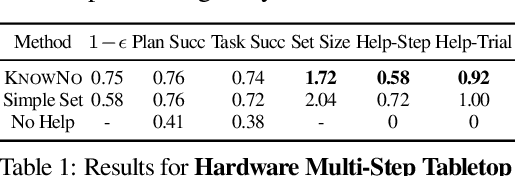


Large language models (LLMs) exhibit a wide range of promising capabilities -- from step-by-step planning to commonsense reasoning -- that may provide utility for robots, but remain prone to confidently hallucinated predictions. In this work, we present KnowNo, which is a framework for measuring and aligning the uncertainty of LLM-based planners such that they know when they don't know and ask for help when needed. KnowNo builds on the theory of conformal prediction to provide statistical guarantees on task completion while minimizing human help in complex multi-step planning settings. Experiments across a variety of simulated and real robot setups that involve tasks with different modes of ambiguity (e.g., from spatial to numeric uncertainties, from human preferences to Winograd schemas) show that KnowNo performs favorably over modern baselines (which may involve ensembles or extensive prompt tuning) in terms of improving efficiency and autonomy, while providing formal assurances. KnowNo can be used with LLMs out of the box without model-finetuning, and suggests a promising lightweight approach to modeling uncertainty that can complement and scale with the growing capabilities of foundation models. Website: https://robot-help.github.io
STEP: Stochastic Traversability Evaluation and Planning for Risk-Aware Off-road Navigation; Results from the DARPA Subterranean Challenge
Mar 02, 2023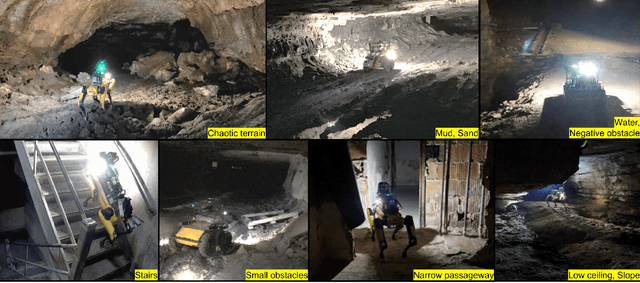
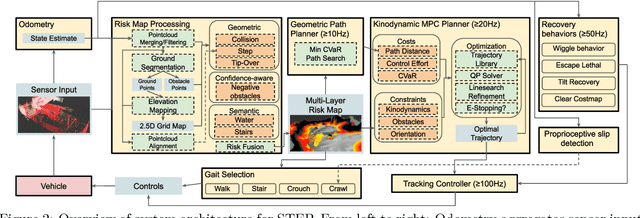

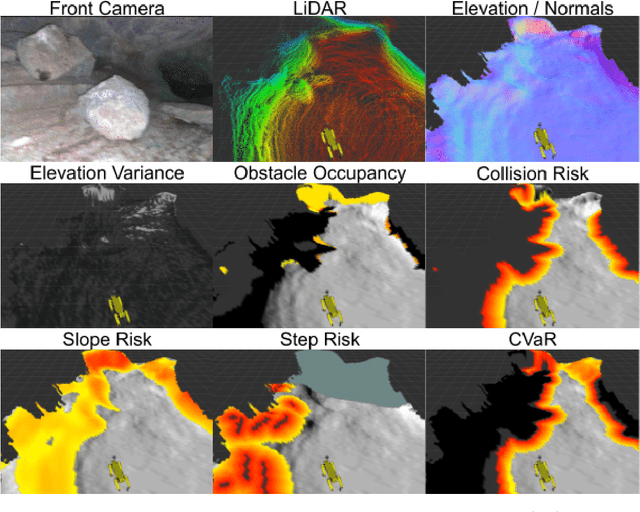
Although autonomy has gained widespread usage in structured and controlled environments, robotic autonomy in unknown and off-road terrain remains a difficult problem. Extreme, off-road, and unstructured environments such as undeveloped wilderness, caves, rubble, and other post-disaster sites pose unique and challenging problems for autonomous navigation. Based on our participation in the DARPA Subterranean Challenge, we propose an approach to improve autonomous traversal of robots in subterranean environments that are perceptually degraded and completely unknown through a traversability and planning framework called STEP (Stochastic Traversability Evaluation and Planning). We present 1) rapid uncertainty-aware mapping and traversability evaluation, 2) tail risk assessment using the Conditional Value-at-Risk (CVaR), 3) efficient risk and constraint-aware kinodynamic motion planning using sequential quadratic programming-based (SQP) model predictive control (MPC), 4) fast recovery behaviors to account for unexpected scenarios that may cause failure, and 5) risk-based gait adaptation for quadrupedal robots. We illustrate and validate extensive results from our experiments on wheeled and legged robotic platforms in field studies at the Valentine Cave, CA (cave environment), Kentucky Underground, KY (mine environment), and Louisville Mega Cavern, KY (final competition site for the DARPA Subterranean Challenge with tunnel, urban, and cave environments).
Adaptive Conformal Prediction for Motion Planning among Dynamic Agents
Dec 01, 2022

This paper proposes an algorithm for motion planning among dynamic agents using adaptive conformal prediction. We consider a deterministic control system and use trajectory predictors to predict the dynamic agents' future motion, which is assumed to follow an unknown distribution. We then leverage ideas from adaptive conformal prediction to dynamically quantify prediction uncertainty from an online data stream. Particularly, we provide an online algorithm uses delayed agent observations to obtain uncertainty sets for multistep-ahead predictions with probabilistic coverage. These uncertainty sets are used within a model predictive controller to safely navigate among dynamic agents. While most existing data-driven prediction approached quantify prediction uncertainty heuristically, we quantify the true prediction uncertainty in a distribution-free, adaptive manner that even allows to capture changes in prediction quality and the agents' motion. We empirically evaluate of our algorithm on a simulation case studies where a drone avoids a flying frisbee.