 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUNRealNet: Learning Uncertainty-Aware Navigation Features from High-Fidelity Scans of Real Environments
Jul 11, 2024



Traversability estimation in rugged, unstructured environments remains a challenging problem in field robotics. Often, the need for precise, accurate traversability estimation is in direct opposition to the limited sensing and compute capability present on affordable, small-scale mobile robots. To address this issue, we present a novel method to learn [u]ncertainty-aware [n]avigation features from high-fidelity scans of [real]-world environments (UNRealNet). This network can be deployed on-robot to predict these high-fidelity features using input from lower-quality sensors. UNRealNet predicts dense, metric-space features directly from single-frame lidar scans, thus reducing the effects of occlusion and odometry error. Our approach is label-free, and is able to produce traversability estimates that are robot-agnostic. Additionally, we can leverage UNRealNet's predictive uncertainty to both produce risk-aware traversability estimates, and refine our feature predictions over time. We find that our method outperforms traditional local mapping and inpainting baselines by up to 40%, and demonstrate its efficacy on multiple legged platforms.
Event Camera and LiDAR based Human Tracking for Adverse Lighting Conditions in Subterranean Environments
Apr 18, 2023



In this article, we propose a novel LiDAR and event camera fusion modality for subterranean (SubT) environments for fast and precise object and human detection in a wide variety of adverse lighting conditions, such as low or no light, high-contrast zones and in the presence of blinding light sources. In the proposed approach, information from the event camera and LiDAR are fused to localize a human or an object-of-interest in a robot's local frame. The local detection is then transformed into the inertial frame and used to set references for a Nonlinear Model Predictive Controller (NMPC) for reactive tracking of humans or objects in SubT environments. The proposed novel fusion uses intensity filtering and K-means clustering on the LiDAR point cloud and frequency filtering and connectivity clustering on the events induced in an event camera by the returning LiDAR beams. The centroids of the clusters in the event camera and LiDAR streams are then paired to localize reflective markers present on safety vests and signs in SubT environments. The efficacy of the proposed scheme has been experimentally validated in a real SubT environment (a mine) with a Pioneer 3AT mobile robot. The experimental results show real-time performance for human detection and the NMPC-based controller allows for reactive tracking of a human or object of interest, even in complete darkness.
STEP: Stochastic Traversability Evaluation and Planning for Risk-Aware Off-road Navigation; Results from the DARPA Subterranean Challenge
Mar 02, 2023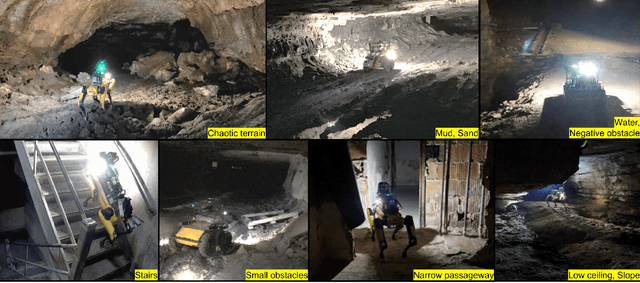
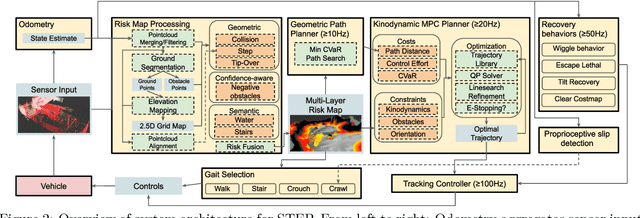

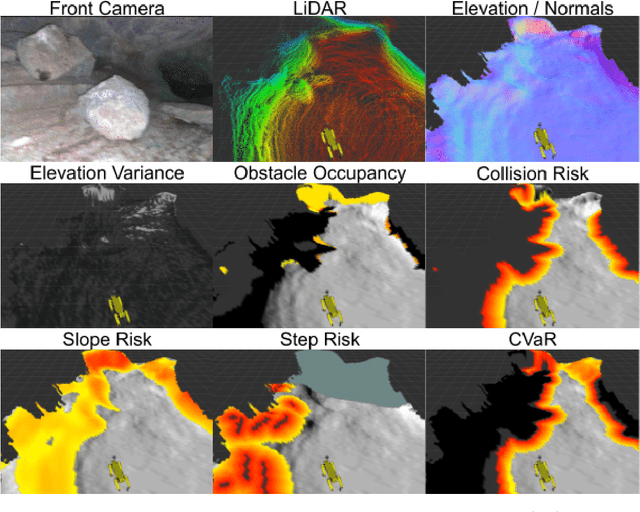
Although autonomy has gained widespread usage in structured and controlled environments, robotic autonomy in unknown and off-road terrain remains a difficult problem. Extreme, off-road, and unstructured environments such as undeveloped wilderness, caves, rubble, and other post-disaster sites pose unique and challenging problems for autonomous navigation. Based on our participation in the DARPA Subterranean Challenge, we propose an approach to improve autonomous traversal of robots in subterranean environments that are perceptually degraded and completely unknown through a traversability and planning framework called STEP (Stochastic Traversability Evaluation and Planning). We present 1) rapid uncertainty-aware mapping and traversability evaluation, 2) tail risk assessment using the Conditional Value-at-Risk (CVaR), 3) efficient risk and constraint-aware kinodynamic motion planning using sequential quadratic programming-based (SQP) model predictive control (MPC), 4) fast recovery behaviors to account for unexpected scenarios that may cause failure, and 5) risk-based gait adaptation for quadrupedal robots. We illustrate and validate extensive results from our experiments on wheeled and legged robotic platforms in field studies at the Valentine Cave, CA (cave environment), Kentucky Underground, KY (mine environment), and Louisville Mega Cavern, KY (final competition site for the DARPA Subterranean Challenge with tunnel, urban, and cave environments).
STEP: Stochastic Traversability Evaluation and Planning for Safe Off-road Navigation
Mar 04, 2021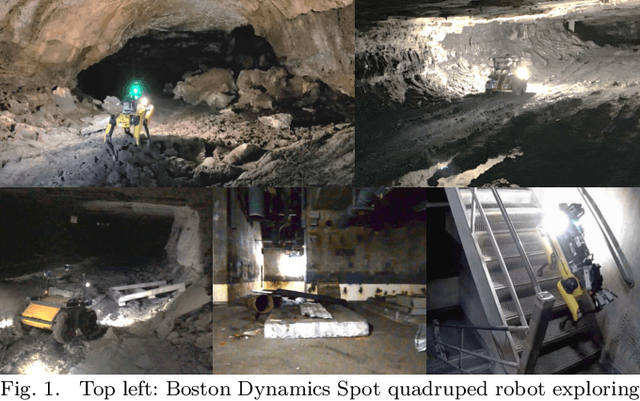
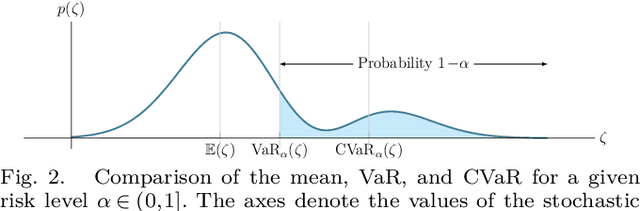
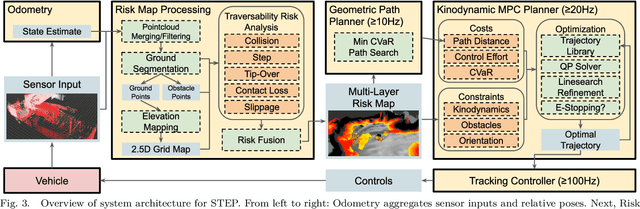
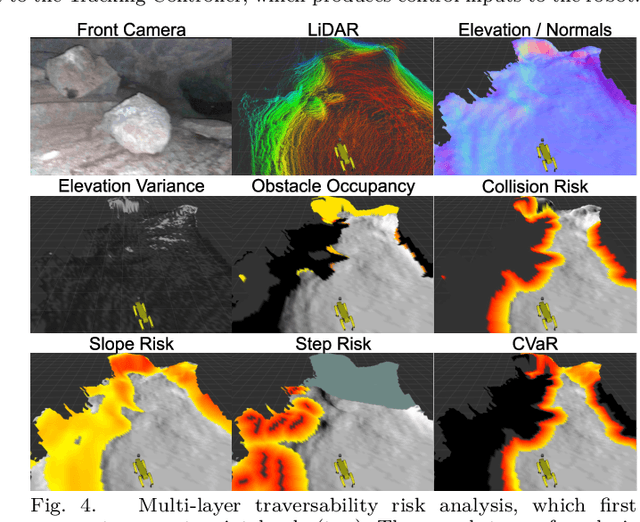
Although ground robotic autonomy has gained widespread usage in structured and controlled environments, autonomy in unknown and off-road terrain remains a difficult problem. Extreme, off-road, and unstructured environments such as undeveloped wilderness, caves, and rubble pose unique and challenging problems for autonomous navigation. To tackle these problems we propose an approach for assessing traversability and planning a safe, feasible, and fast trajectory in real-time. Our approach, which we name STEP (Stochastic Traversability Evaluation and Planning), relies on: 1) rapid uncertainty-aware mapping and traversability evaluation, 2) tail risk assessment using the Conditional Value-at-Risk (CVaR), and 3) efficient risk and constraint-aware kinodynamic motion planning using sequential quadratic programming-based (SQP) model predictive control (MPC). We analyze our method in simulation and validate its efficacy on wheeled and legged robotic platforms exploring extreme terrains including an underground lava tube.