 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Addendum to NeBula: Towards Extending TEAM CoSTAR's Solution to Larger Scale Environments
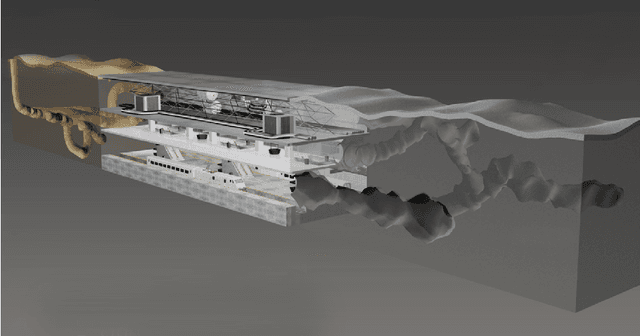
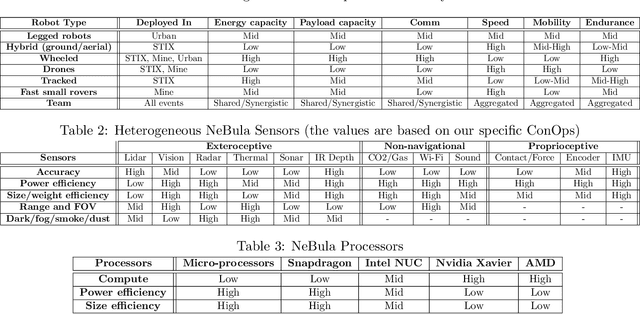
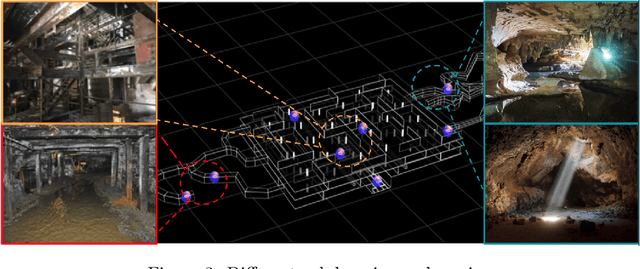
Apr 18, 2025This paper presents an appendix to the original NeBula autonomy solution developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), participating in the DARPA Subterranean Challenge. Specifically, this paper presents extensions to NeBula's hardware, software, and algorithmic components that focus on increasing the range and scale of the exploration environment. From the algorithmic perspective, we discuss the following extensions to the original NeBula framework: (i) large-scale geometric and semantic environment mapping; (ii) an adaptive positioning system; (iii) probabilistic traversability analysis and local planning; (iv) large-scale POMDP-based global motion planning and exploration behavior; (v) large-scale networking and decentralized reasoning; (vi) communication-aware mission planning; and (vii) multi-modal ground-aerial exploration solutions. We demonstrate the application and deployment of the presented systems and solutions in various large-scale underground environments, including limestone mine exploration scenarios as well as deployment in the DARPA Subterranean challenge.
Optimization of body configuration and joint-driven attitude stabilization for transformable spacecrafts under solar radiation pressure
Jan 20, 2023A solar sail is one of the most promising space exploration system because of its theoretically infinite specific impulse using solar radiation pressure (SRP). Recently, some researchers proposed "transformable spacecrafts" that can actively reconfigure their body configurations with actuatable joints. The transformable spacecrafts are expected to greatly enhance orbit and attitude control capability due to its high redundancy in control degree of freedom if they are used as solar sails. However, its large number of input poses difficulties in control, and therefore, previous researchers imposed strong constraints to limit its potential control capabilities. This paper addresses novel attitude control techniques for the transformable spacecrafts under SRP. The authors have constructed two proposed methods; one of those is a joint angle optimization to acquire arbitrary SRP force and torque, and the other is a momentum damping control driven by joint angle actuation. Our proposed methods are formulated in general forms and applicable to any transformable solar sail that consists of flat and thin body components. Validity of the proposed methods are confirmed by numerical simulations. This paper contributes to making most of the high control redundancy of transformable solar sails without consuming any expendable propellants, which is expected to greatly enhance orbit and attitude control capability.
Deficient Basis Estimation of Noise Spatial Covariance Matrix for Rank-Constrained Spatial Covariance Matrix Estimation Method in Blind Speech Extraction
May 06, 2021
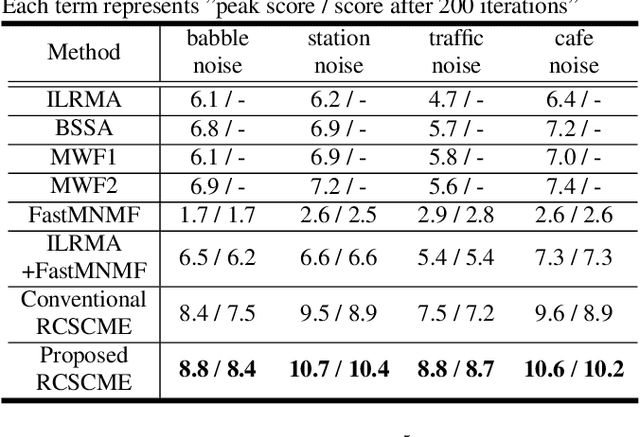
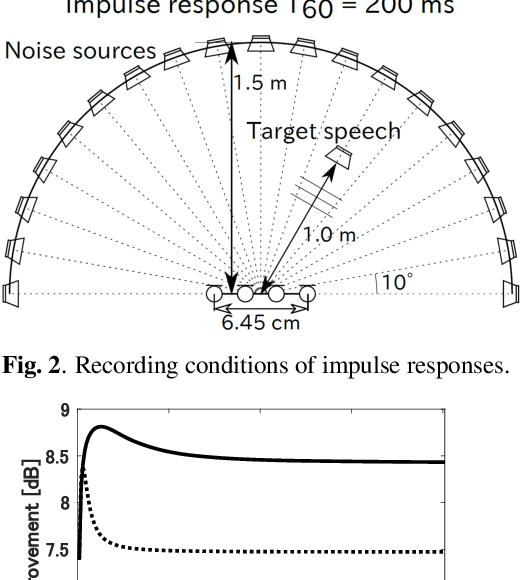
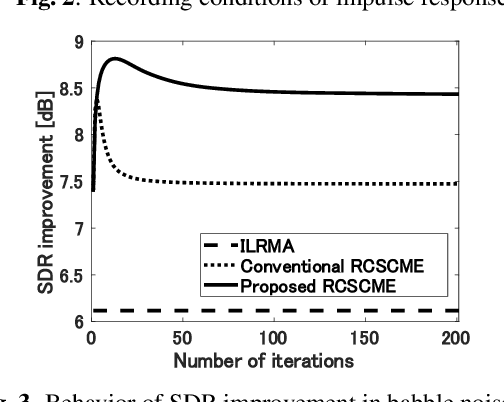
Rank-constrained spatial covariance matrix estimation (RCSCME) is a state-of-the-art blind speech extraction method applied to cases where one directional target speech and diffuse noise are mixed. In this paper, we proposed a new algorithmic extension of RCSCME. RCSCME complements a deficient one rank of the diffuse noise spatial covariance matrix, which cannot be estimated via preprocessing such as independent low-rank matrix analysis, and estimates the source model parameters simultaneously. In the conventional RCSCME, a direction of the deficient basis is fixed in advance and only the scale is estimated; however, the candidate of this deficient basis is not unique in general. In the proposed RCSCME model, the deficient basis itself can be accurately estimated as a vector variable by solving a vector optimization problem. Also, we derive new update rules based on the EM algorithm. We confirm that the proposed method outperforms conventional methods under several noise conditions.
NeBula: Quest for Robotic Autonomy in Challenging Environments; TEAM CoSTAR at the DARPA Subterranean Challenge
Mar 28, 2021
This paper presents and discusses algorithms, hardware, and software architecture developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), competing in the DARPA Subterranean Challenge. Specifically, it presents the techniques utilized within the Tunnel (2019) and Urban (2020) competitions, where CoSTAR achieved 2nd and 1st place, respectively. We also discuss CoSTAR's demonstrations in Martian-analog surface and subsurface (lava tubes) exploration. The paper introduces our autonomy solution, referred to as NeBula (Networked Belief-aware Perceptual Autonomy). NeBula is an uncertainty-aware framework that aims at enabling resilient and modular autonomy solutions by performing reasoning and decision making in the belief space (space of probability distributions over the robot and world states). We discuss various components of the NeBula framework, including: (i) geometric and semantic environment mapping; (ii) a multi-modal positioning system; (iii) traversability analysis and local planning; (iv) global motion planning and exploration behavior; (i) risk-aware mission planning; (vi) networking and decentralized reasoning; and (vii) learning-enabled adaptation. We discuss the performance of NeBula on several robot types (e.g. wheeled, legged, flying), in various environments. We discuss the specific results and lessons learned from fielding this solution in the challenging courses of the DARPA Subterranean Challenge competition.
STEP: Stochastic Traversability Evaluation and Planning for Safe Off-road Navigation
Mar 04, 2021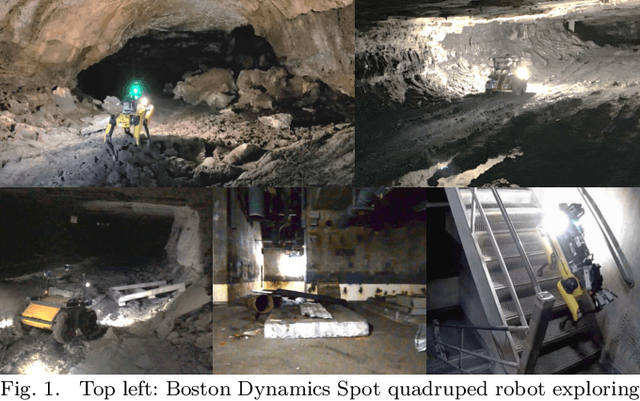
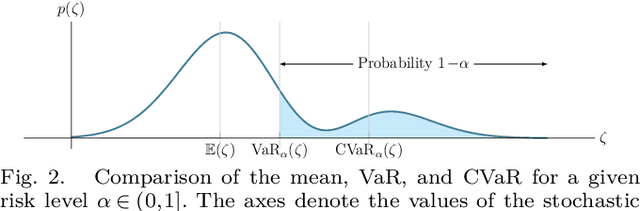
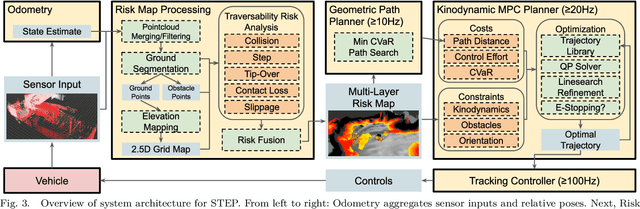
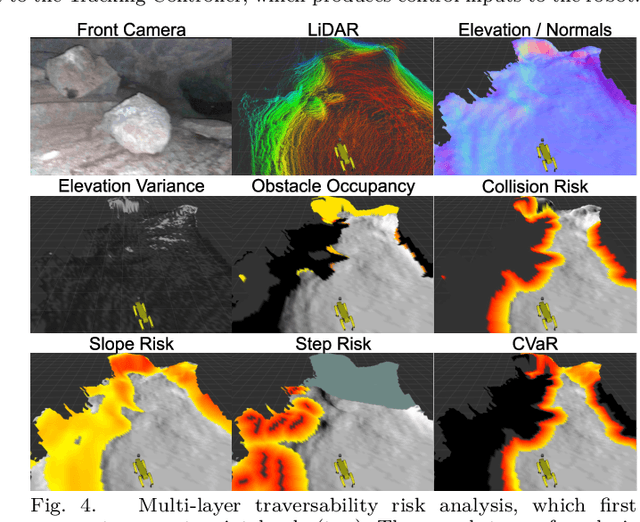
Although ground robotic autonomy has gained widespread usage in structured and controlled environments, autonomy in unknown and off-road terrain remains a difficult problem. Extreme, off-road, and unstructured environments such as undeveloped wilderness, caves, and rubble pose unique and challenging problems for autonomous navigation. To tackle these problems we propose an approach for assessing traversability and planning a safe, feasible, and fast trajectory in real-time. Our approach, which we name STEP (Stochastic Traversability Evaluation and Planning), relies on: 1) rapid uncertainty-aware mapping and traversability evaluation, 2) tail risk assessment using the Conditional Value-at-Risk (CVaR), and 3) efficient risk and constraint-aware kinodynamic motion planning using sequential quadratic programming-based (SQP) model predictive control (MPC). We analyze our method in simulation and validate its efficacy on wheeled and legged robotic platforms exploring extreme terrains including an underground lava tube.