 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrePARE: Predictive Proprioception for Agile Failure Event Detection in Robotic Exploration of Extreme Terrains
Paper and Code
Jul 30, 2022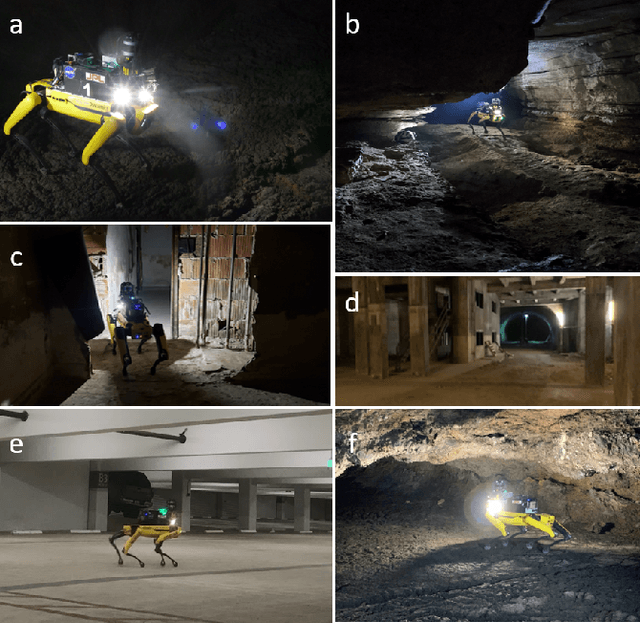
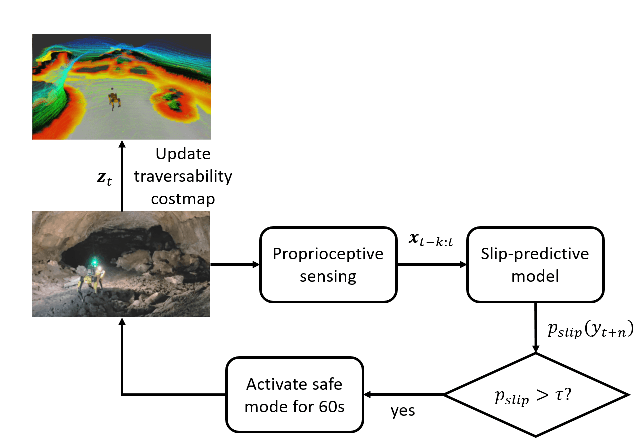
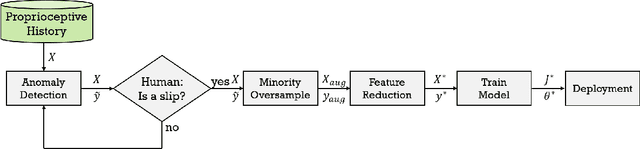
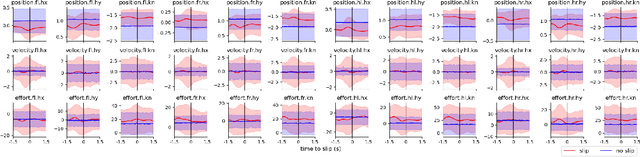
Legged robots can traverse a wide variety of terrains, some of which may be challenging for wheeled robots, such as stairs or highly uneven surfaces. However, quadruped robots face stability challenges on slippery surfaces. This can be resolved by adjusting the robot's locomotion by switching to more conservative and stable locomotion modes, such as crawl mode (where three feet are in contact with the ground always) or amble mode (where one foot touches down at a time) to prevent potential falls. To tackle these challenges, we propose an approach to learn a model from past robot experience for predictive detection of potential failures. Accordingly, we trigger gait switching merely based on proprioceptive sensory information. To learn this predictive model, we propose a semi-supervised process for detecting and annotating ground truth slip events in two stages: We first detect abnormal occurrences in the time series sequences of the gait data using an unsupervised anomaly detector, and then, the anomalies are verified with expert human knowledge in a replay simulation to assert the event of a slip. These annotated slip events are then used as ground truth examples to train an ensemble decision learner for predicting slip probabilities across terrains for traversability. We analyze our model on data recorded by a legged robot on multiple sites with slippery terrain. We demonstrate that a potential slip event can be predicted up to 720 ms ahead of a potential fall with an average precision greater than 0.95 and an average F-score of 0.82. Finally, we validate our approach in real-time by deploying it on a legged robot and switching its gait mode based on slip event detection.