 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Conformal Prediction for Motion Planning among Dynamic Agents
Dec 01, 2022

This paper proposes an algorithm for motion planning among dynamic agents using adaptive conformal prediction. We consider a deterministic control system and use trajectory predictors to predict the dynamic agents' future motion, which is assumed to follow an unknown distribution. We then leverage ideas from adaptive conformal prediction to dynamically quantify prediction uncertainty from an online data stream. Particularly, we provide an online algorithm uses delayed agent observations to obtain uncertainty sets for multistep-ahead predictions with probabilistic coverage. These uncertainty sets are used within a model predictive controller to safely navigate among dynamic agents. While most existing data-driven prediction approached quantify prediction uncertainty heuristically, we quantify the true prediction uncertainty in a distribution-free, adaptive manner that even allows to capture changes in prediction quality and the agents' motion. We empirically evaluate of our algorithm on a simulation case studies where a drone avoids a flying frisbee.
Motivations and Preliminary Design for Mid-Air Deployment of a Science Rotorcraft on Mars
Oct 13, 2020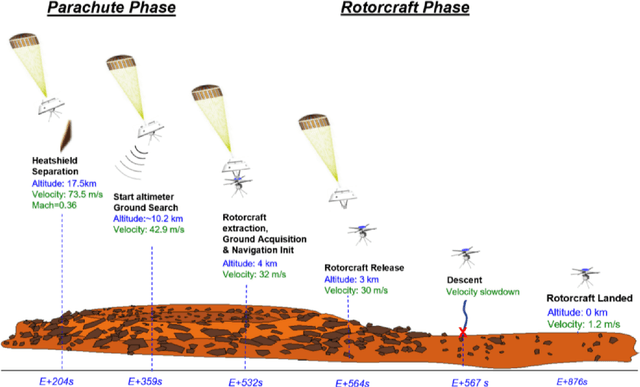
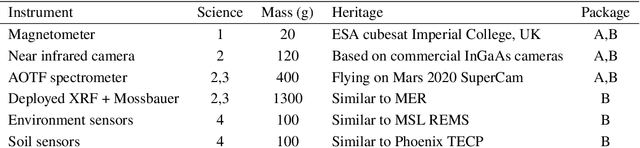
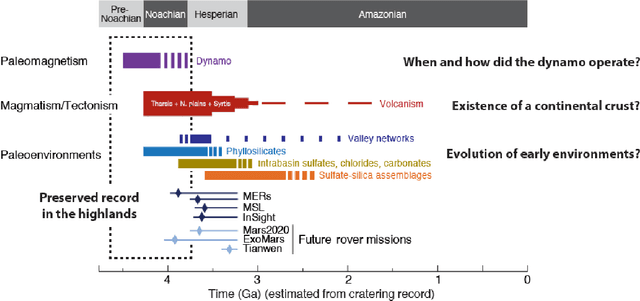
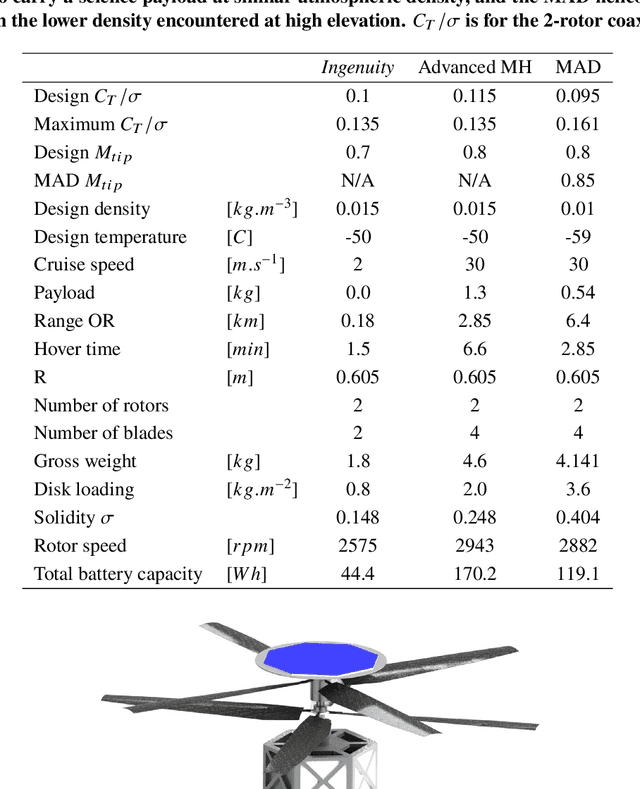
Mid-Air Deployment (MAD) of a rotorcraft during Entry, Descent and Landing (EDL) on Mars eliminates the need to carry a propulsion or airbag landing system. This reduces the total mass inside the aeroshell by more than 100 kg and simplifies the aeroshell architecture. MAD's lighter and simpler design is likely to bring the risk and cost associated with the mission down. Moreover, the lighter entry mass enables landing in the Martian highlands, at elevations inaccessible to current EDL technologies. This paper proposes a novel MAD concept for a Mars helicopter. We suggest a minimum science payload package to perform relevant science in the highlands. A variant of the Ingenuity helicopter is proposed to provide increased deceleration during MAD, and enough lift to fly the science payload in the highlands. We show in simulation that the lighter aeroshell results in a lower terminal velocity (30 m/s) at the end of the parachute phase of the EDL, and at higher altitudes than other approaches. After discussing the aerodynamics, controls, guidance, and mechanical challenges associated with deploying at such speed, we propose a backshell architecture that addresses them to release the helicopter in the safest conditions. Finally, we implemented the helicopter model and aerodynamic descent perturbations in the JPL Dynamics and Real-Time Simulation (DARTS)framework. Preliminary performance evaluation indicates landing and helicopter operation scan be achieved up to 5 km MOLA (Mars Orbiter Laser Altimeter reference).