 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRisk-Aware Robotics: Tail Risk Measures in Planning, Control, and Verification
Mar 27, 2024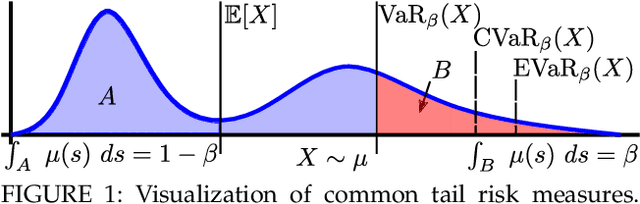
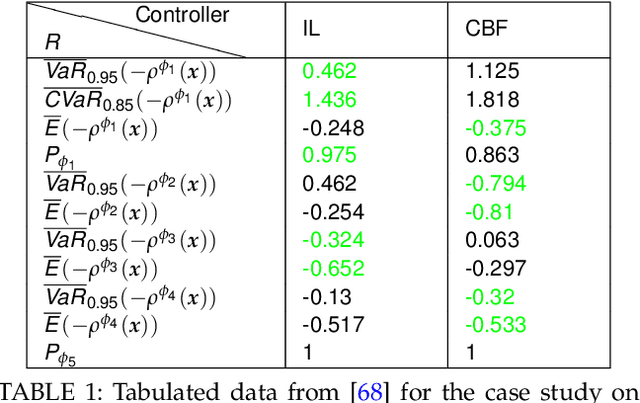
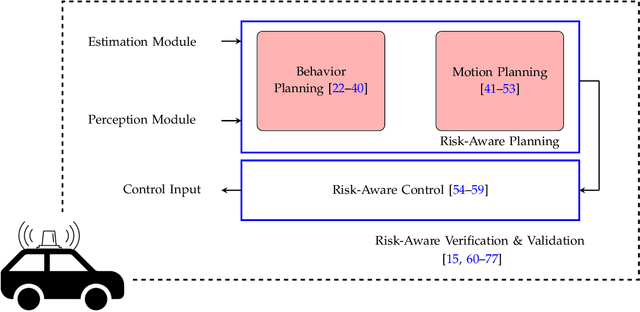
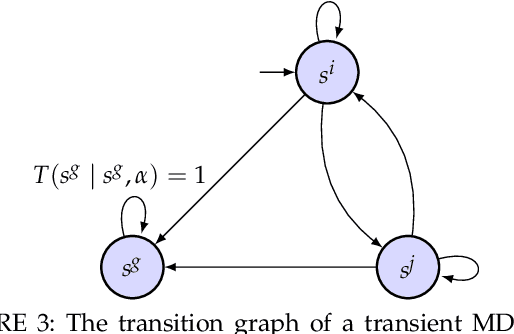
The need for a systematic approach to risk assessment has increased in recent years due to the ubiquity of autonomous systems that alter our day-to-day experiences and their need for safety, e.g., for self-driving vehicles, mobile service robots, and bipedal robots. These systems are expected to function safely in unpredictable environments and interact seamlessly with humans, whose behavior is notably challenging to forecast. We present a survey of risk-aware methodologies for autonomous systems. We adopt a contemporary risk-aware approach to mitigate rare and detrimental outcomes by advocating the use of tail risk measures, a concept borrowed from financial literature. This survey will introduce these measures and explain their relevance in the context of robotic systems for planning, control, and verification applications.
Verifiable Learned Behaviors via Motion Primitive Composition: Applications to Scooping of Granular Media
Sep 26, 2023A robotic behavior model that can reliably generate behaviors from natural language inputs in real time would substantially expedite the adoption of industrial robots due to enhanced system flexibility. To facilitate these efforts, we construct a framework in which learned behaviors, created by a natural language abstractor, are verifiable by construction. Leveraging recent advancements in motion primitives and probabilistic verification, we construct a natural-language behavior abstractor that generates behaviors by synthesizing a directed graph over the provided motion primitives. If these component motion primitives are constructed according to the criteria we specify, the resulting behaviors are probabilistically verifiable. We demonstrate this verifiable behavior generation capacity in both simulation on an exploration task and on hardware with a robot scooping granular media.
Bounding Optimality Gaps for Non-Convex Optimization Problems: Applications to Nonlinear Safety-Critical Systems
Apr 07, 2023



Efficient methods to provide sub-optimal solutions to non-convex optimization problems with knowledge of the solution's sub-optimality would facilitate the widespread application of nonlinear optimal control algorithms. To that end, leveraging recent work in risk-aware verification, we provide two algorithms to (1) probabilistically bound the optimality gaps of solutions reported by novel percentile optimization techniques, and (2) probabilistically bound the maximum optimality gap reported by percentile approaches for repetitive applications, e.g. Model Predictive Control (MPC). Notably, our results work for a large class of optimization problems. We showcase the efficacy and repeatability of our results on a few, benchmark non-convex optimization problems and the utility of our results for controls in a Nonlinear MPC setting.
Probabilistic Guarantees for Nonlinear Safety-Critical Optimal Control
Mar 11, 2023Leveraging recent developments in black-box risk-aware verification, we provide three algorithms that generate probabilistic guarantees on (1) optimality of solutions, (2) recursive feasibility, and (3) maximum controller runtimes for general nonlinear safety-critical finite-time optimal controllers. These methods forego the usual (perhaps) restrictive assumptions required for typical theoretical guarantees, e.g. terminal set calculation for recursive feasibility in Nonlinear Model Predictive Control, or convexification of optimal controllers to ensure optimality. Furthermore, we show that these methods can directly be applied to hardware systems to generate controller guarantees on their respective systems.
Barrier-Based Test Synthesis for Safety-Critical Systems Subject to Timed Reach-Avoid Specifications
Jan 23, 2023We propose an adversarial, time-varying test-synthesis procedure for safety-critical systems without requiring specific knowledge of the underlying controller steering the system. From a broader test and evaluation context, determination of difficult tests of system behavior is important as these tests would elucidate problematic system phenomena before these mistakes can engender problematic outcomes, e.g. loss of human life in autonomous cars, costly failures for airplane systems, etc. Our approach builds on existing, simulation-based work in the test and evaluation literature by offering a controller-agnostic test-synthesis procedure that provides a series of benchmark tests with which to determine controller reliability. To achieve this, our approach codifies the system objective as a timed reach-avoid specification. Then, by coupling control barrier functions with this class of specifications, we construct an instantaneous difficulty metric whose minimizer corresponds to the most difficult test at that system state. We use this instantaneous difficulty metric in a game-theoretic fashion, to produce an adversarial, time-varying test-synthesis procedure that does not require specific knowledge of the system's controller, but can still provably identify realizable and maximally difficult tests of system behavior. Finally, we develop this test-synthesis procedure for both continuous and discrete-time systems and showcase our test-synthesis procedure on simulated and hardware examples.
Learning Disturbances Online for Risk-Aware Control: Risk-Aware Flight with Less Than One Minute of Data
Dec 12, 2022Recent advances in safety-critical risk-aware control are predicated on apriori knowledge of the disturbances a system might face. This paper proposes a method to efficiently learn these disturbances online, in a risk-aware context. First, we introduce the concept of a Surface-at-Risk, a risk measure for stochastic processes that extends Value-at-Risk -- a commonly utilized risk measure in the risk-aware controls community. Second, we model the norm of the state discrepancy between the model and the true system evolution as a scalar-valued stochastic process and determine an upper bound to its Surface-at-Risk via Gaussian Process Regression. Third, we provide theoretical results on the accuracy of our fitted surface subject to mild assumptions that are verifiable with respect to the data sets collected during system operation. Finally, we experimentally verify our procedure by augmenting a drone's controller and highlight performance increases achieved via our risk-aware approach after collecting less than a minute of operating data.
Verifiably Safe Reinforcement Learning with Probabilistic Guarantees via Temporal Logic
Dec 12, 2022Reinforcement Learning (RL) can solve complex tasks but does not intrinsically provide any guarantees on system behavior. For real-world systems that fulfill safety-critical tasks, such guarantees on safety specifications are necessary. To bridge this gap, we propose a verifiably safe RL procedure with probabilistic guarantees. First, our approach probabilistically verifies a candidate controller with respect to a temporal logic specification, while randomizing the controller's inputs within a bounded set. Then, we use RL to improve the performance of this probabilistically verified, i.e. safe, controller and explore in the same bounded set around the controller's input as was randomized over in the verification step. Finally, we calculate probabilistic safety guarantees with respect to temporal logic specifications for the learned agent. Our approach is efficient for continuous action and state spaces and separates safety verification and performance improvement into two independent steps. We evaluate our approach on a safe evasion task where a robot has to evade a dynamic obstacle in a specific manner while trying to reach a goal. The results show that our verifiably safe RL approach leads to efficient learning and performance improvements while maintaining safety specifications.
Sample-Based Bounds for Coherent Risk Measures: Applications to Policy Synthesis and Verification
Apr 21, 2022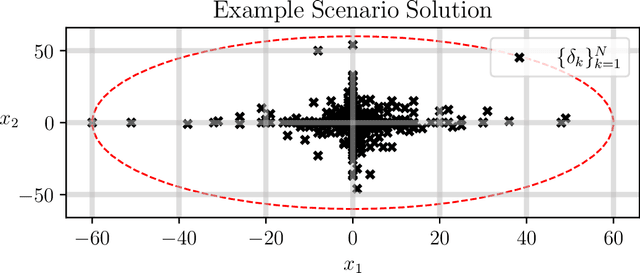
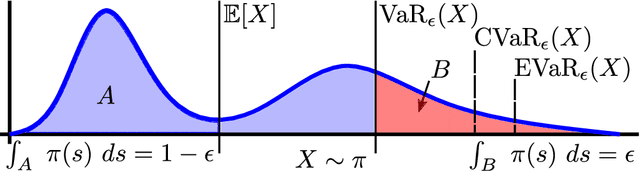
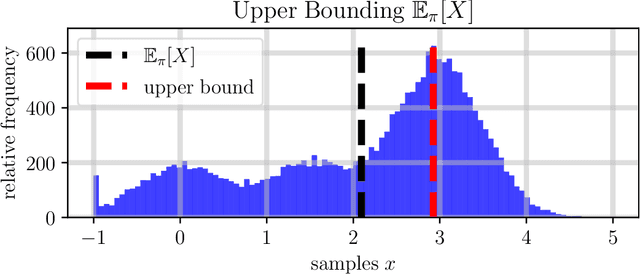
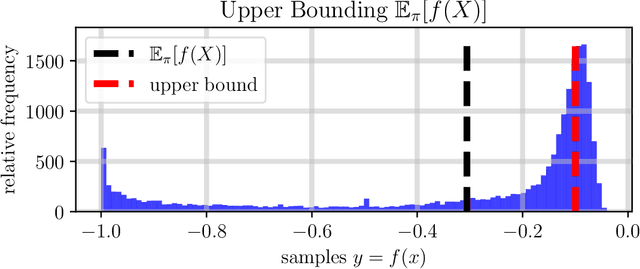
The dramatic increase of autonomous systems subject to variable environments has given rise to the pressing need to consider risk in both the synthesis and verification of policies for these systems. This paper aims to address a few problems regarding risk-aware verification and policy synthesis, by first developing a sample-based method to bound the risk measure evaluation of a random variable whose distribution is unknown. These bounds permit us to generate high-confidence verification statements for a large class of robotic systems. Second, we develop a sample-based method to determine solutions to non-convex optimization problems that outperform a large fraction of the decision space of possible solutions. Both sample-based approaches then permit us to rapidly synthesize risk-aware policies that are guaranteed to achieve a minimum level of system performance. To showcase our approach in simulation, we verify a cooperative multi-agent system and develop a risk-aware controller that outperforms the system's baseline controller. We also mention how our approach can be extended to account for any $g$-entropic risk measure - the subset of coherent risk measures on which we focus.
Test and Evaluation of Quadrupedal Walking Gaits through Sim2Real Gap Quantification
Jan 04, 2022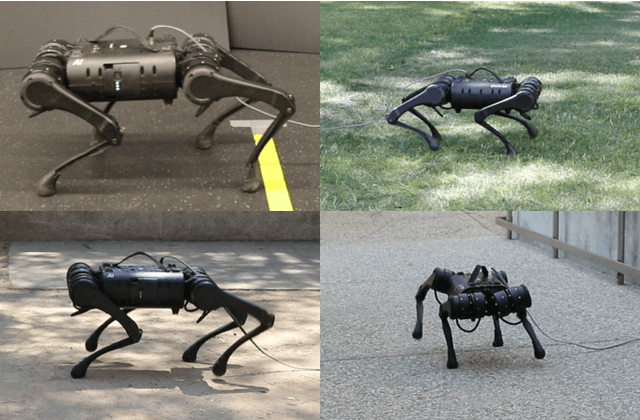
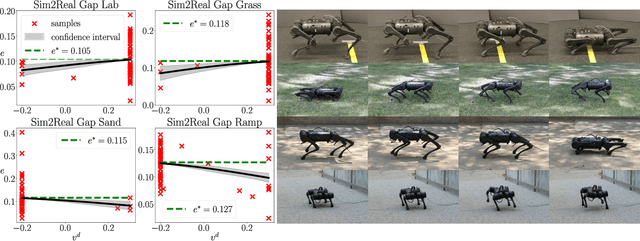
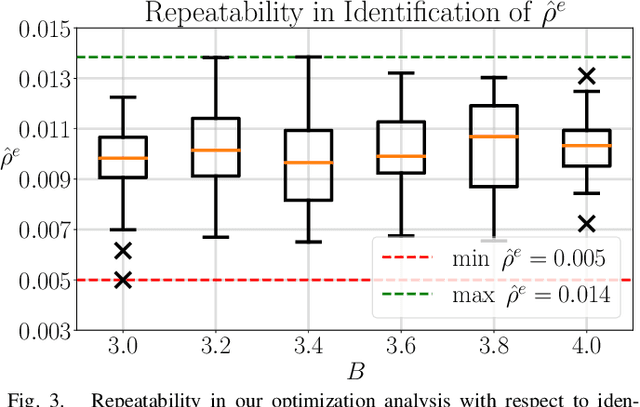
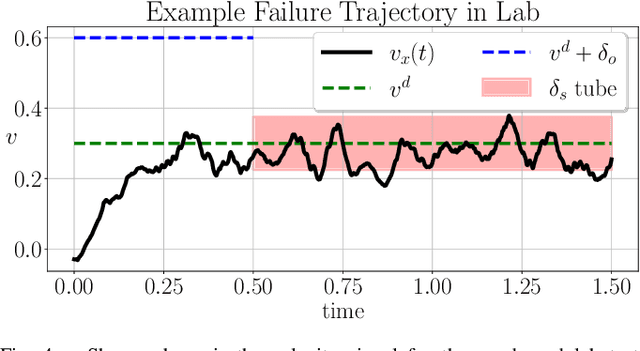
In this letter, the authors propose a two-step approach to evaluate and verify a true system's capacity to satisfy its operational objective. Specifically, whenever the system objective has a quantifiable measure of satisfaction, i.e. a signal temporal logic specification, a barrier function, etc - the authors develop two separate optimization problems solvable via a Bayesian Optimization procedure detailed within. This dual approach has the added benefit of quantifying the Sim2Real Gap between a system simulator and its hardware counterpart. Our contributions are twofold. First, we show repeatability with respect to our outlined optimization procedure in solving these optimization problems. Second, we show that the same procedure can discriminate between different environments by identifying the Sim2Real Gap between a simulator and its hardware counterpart operating in different environments.
Information-Collection in Robotic Process Monitoring: An Active Perception Approach
May 01, 2020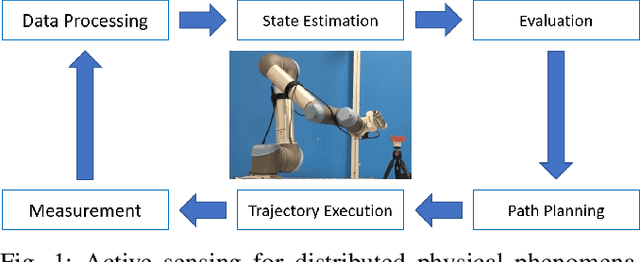
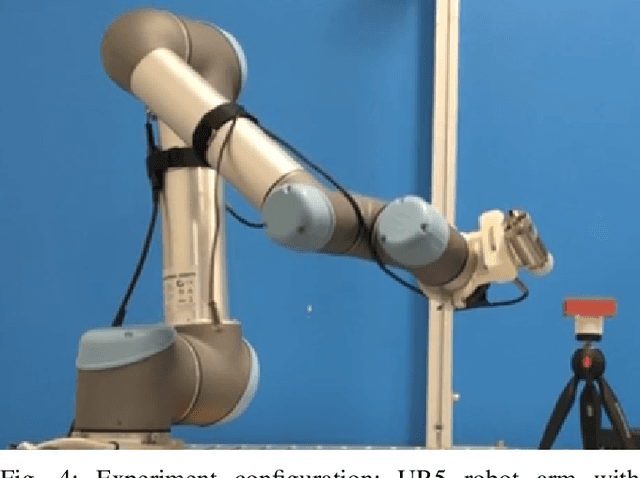
Active perception systems maximizing information gain to support both monitoring and decision making have seen considerable application in recent work. In this paper, we propose and demonstrate a method of acquiring and extrapolating information in an active sensory system through use of a Bayesian Filter. Our approach is motivated by manufacturing processes, where automated visual tracking of system states may aid in fault diagnosis, certification of parts and safety; in extreme cases, our approach may enable novel manufacturing processes relying on monitoring solutions beyond passive perception. We demonstrate how using a Bayesian Filter in active perception scenarios permits reasoning about future actions based on measured as well as unmeasured but propagated state elements, thereby increasing substantially the quality of information available to decision making algorithms used in control of overarching processes. We demonstrate use of our active perception system in physical experiments, where we use a time-varying Kalman Filter to resolve uncertainty for a representative system capturing in additive manufacturing.