 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInformation-Collection in Robotic Process Monitoring: An Active Perception Approach
Paper and Code
May 01, 2020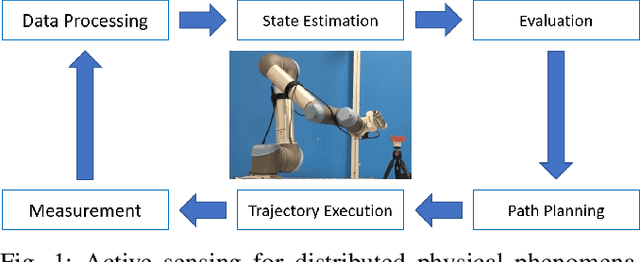
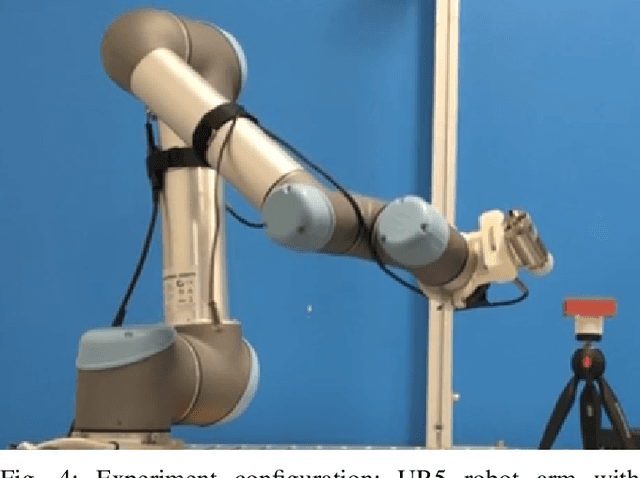
Active perception systems maximizing information gain to support both monitoring and decision making have seen considerable application in recent work. In this paper, we propose and demonstrate a method of acquiring and extrapolating information in an active sensory system through use of a Bayesian Filter. Our approach is motivated by manufacturing processes, where automated visual tracking of system states may aid in fault diagnosis, certification of parts and safety; in extreme cases, our approach may enable novel manufacturing processes relying on monitoring solutions beyond passive perception. We demonstrate how using a Bayesian Filter in active perception scenarios permits reasoning about future actions based on measured as well as unmeasured but propagated state elements, thereby increasing substantially the quality of information available to decision making algorithms used in control of overarching processes. We demonstrate use of our active perception system in physical experiments, where we use a time-varying Kalman Filter to resolve uncertainty for a representative system capturing in additive manufacturing.