 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal Sequential Task Assignment and Path Finding for Multi-Agent Robotic Assembly Planning
Jun 16, 2020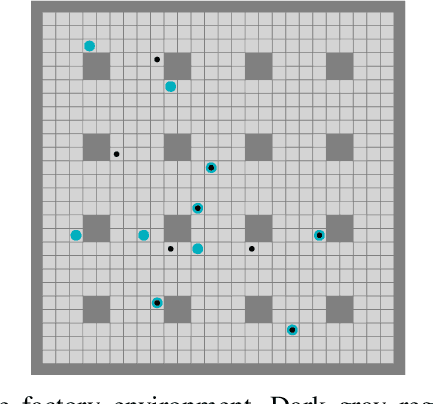


We study the problem of sequential task assignment and collision-free routing for large teams of robots in applications with inter-task precedence constraints (e.g., task $A$ and task $B$ must both be completed before task $C$ may begin). Such problems commonly occur in assembly planning for robotic manufacturing applications, in which sub-assemblies must be completed before they can be combined to form the final product. We propose a hierarchical algorithm for computing makespan-optimal solutions to the problem. The algorithm is evaluated on a set of randomly generated problem instances where robots must transport objects between stations in a "factory "grid world environment. In addition, we demonstrate in high-fidelity simulation that the output of our algorithm can be used to generate collision-free trajectories for non-holonomic differential-drive robots.
* Presented at International Conference on Robotics and Automation (ICRA) 2020
Information-Collection in Robotic Process Monitoring: An Active Perception Approach
May 01, 2020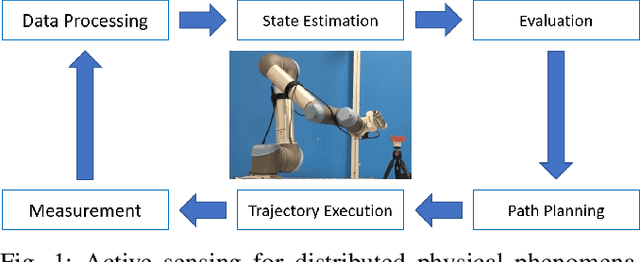
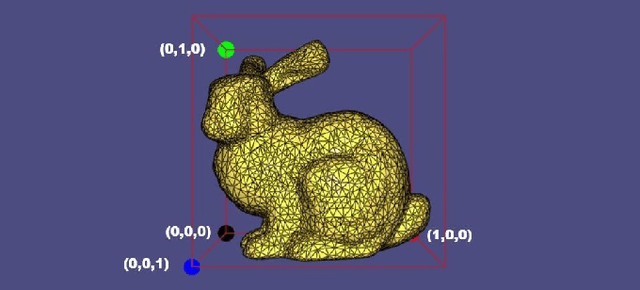
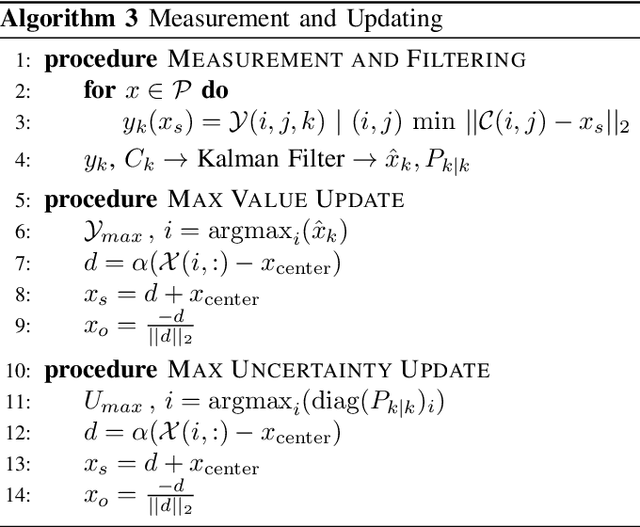
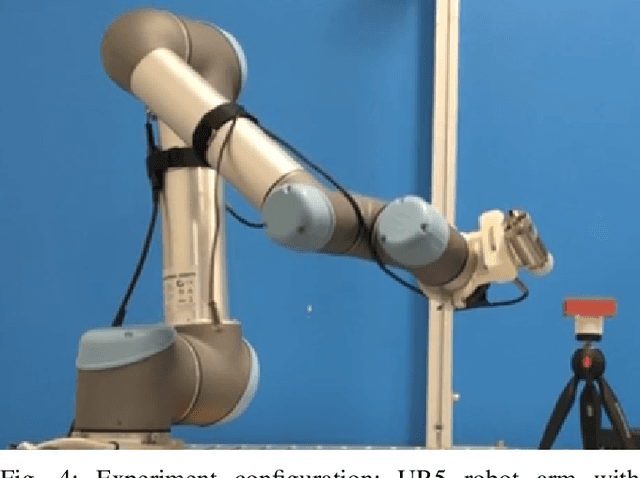
Active perception systems maximizing information gain to support both monitoring and decision making have seen considerable application in recent work. In this paper, we propose and demonstrate a method of acquiring and extrapolating information in an active sensory system through use of a Bayesian Filter. Our approach is motivated by manufacturing processes, where automated visual tracking of system states may aid in fault diagnosis, certification of parts and safety; in extreme cases, our approach may enable novel manufacturing processes relying on monitoring solutions beyond passive perception. We demonstrate how using a Bayesian Filter in active perception scenarios permits reasoning about future actions based on measured as well as unmeasured but propagated state elements, thereby increasing substantially the quality of information available to decision making algorithms used in control of overarching processes. We demonstrate use of our active perception system in physical experiments, where we use a time-varying Kalman Filter to resolve uncertainty for a representative system capturing in additive manufacturing.