 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLarge-Scale Multi-Robot Assembly Planning for Autonomous Manufacturing
Oct 31, 2023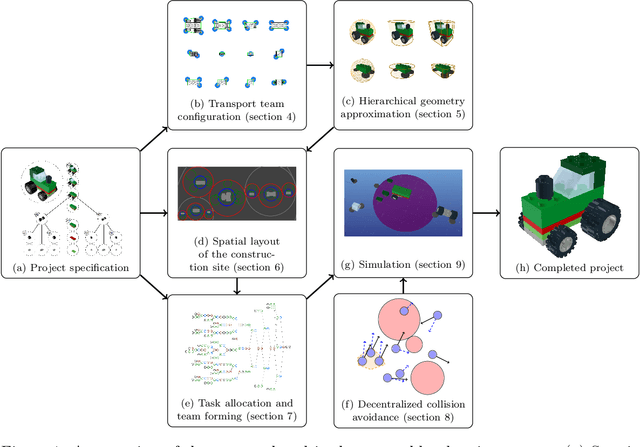


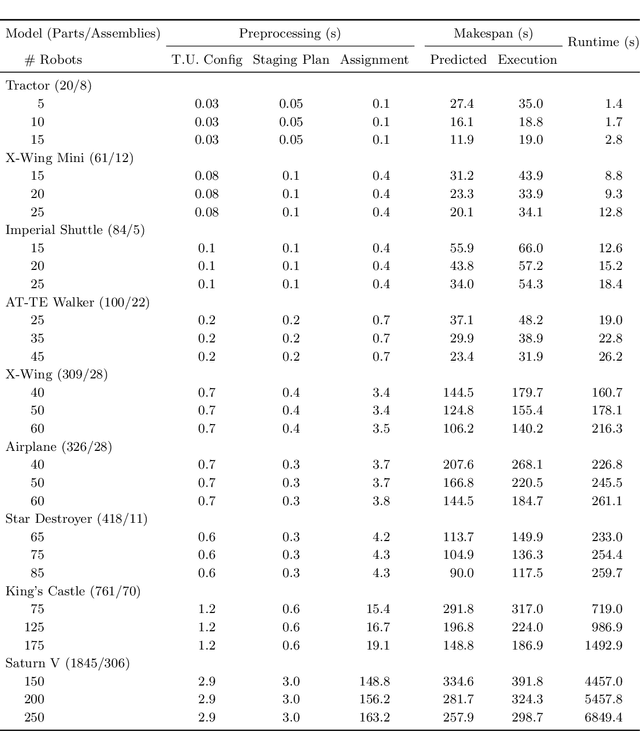
Mobile autonomous robots have the potential to revolutionize manufacturing processes. However, employing large robot fleets in manufacturing requires addressing challenges including collision-free movement in a shared workspace, effective multi-robot collaboration to manipulate and transport large payloads, complex task allocation due to coupled manufacturing processes, and spatial planning for parallel assembly and transportation of nested subassemblies. We propose a full algorithmic stack for large-scale multi-robot assembly planning that addresses these challenges and can synthesize construction plans for complex assemblies with thousands of parts in a matter of minutes. Our approach takes in a CAD-like product specification and automatically plans a full-stack assembly procedure for a group of robots to manufacture the product. We propose an algorithmic stack that comprises: (i) an iterative radial layout optimization procedure to define a global staging layout for the manufacturing facility, (ii) a graph-repair mixed-integer program formulation and a modified greedy task allocation algorithm to optimally allocate robots and robot sub-teams to assembly and transport tasks, (iii) a geometric heuristic and a hill-climbing algorithm to plan collaborative carrying configurations of robot sub-teams, and (iv) a distributed control policy that enables robots to execute the assembly motion plan collision-free. We also present an open-source multi-robot manufacturing simulator implemented in Julia as a resource to the research community, to test our algorithms and to facilitate multi-robot manufacturing research more broadly. Our empirical results demonstrate the scalability and effectiveness of our approach by generating plans to manufacture a LEGO model of a Saturn V launch vehicle with 1845 parts, 306 subassemblies, and 250 robots in under three minutes on a standard laptop computer.
Optimal Sequential Task Assignment and Path Finding for Multi-Agent Robotic Assembly Planning
Jun 16, 2020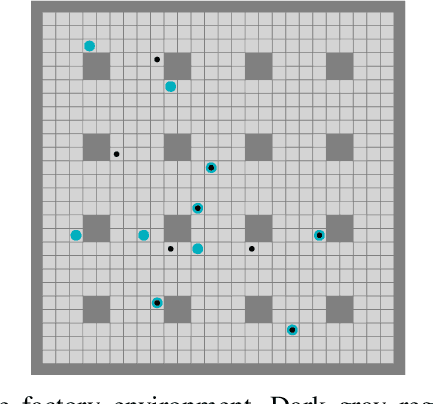


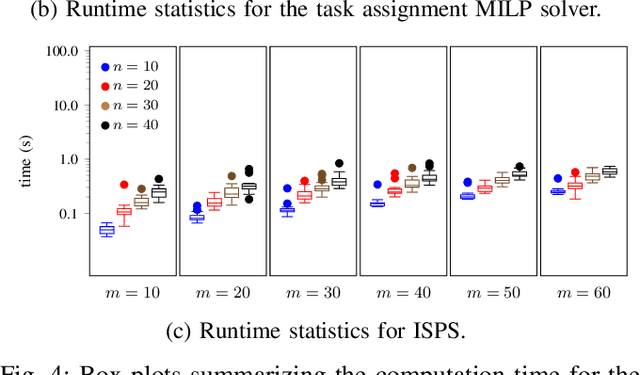
We study the problem of sequential task assignment and collision-free routing for large teams of robots in applications with inter-task precedence constraints (e.g., task $A$ and task $B$ must both be completed before task $C$ may begin). Such problems commonly occur in assembly planning for robotic manufacturing applications, in which sub-assemblies must be completed before they can be combined to form the final product. We propose a hierarchical algorithm for computing makespan-optimal solutions to the problem. The algorithm is evaluated on a set of randomly generated problem instances where robots must transport objects between stations in a "factory "grid world environment. In addition, we demonstrate in high-fidelity simulation that the output of our algorithm can be used to generate collision-free trajectories for non-holonomic differential-drive robots.
* Presented at International Conference on Robotics and Automation (ICRA) 2020
Modeling and Prediction of Human Driver Behavior: A Survey
Jun 15, 2020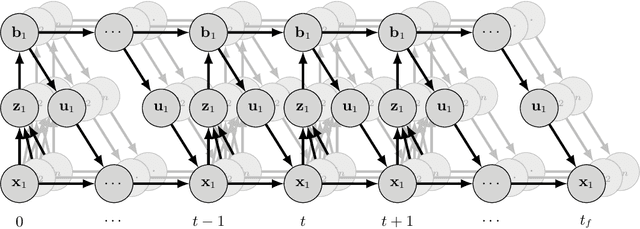
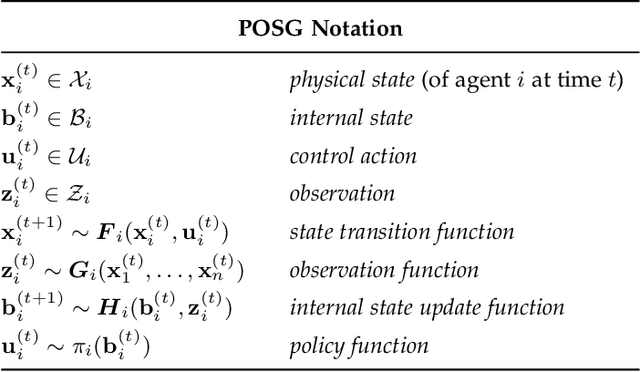
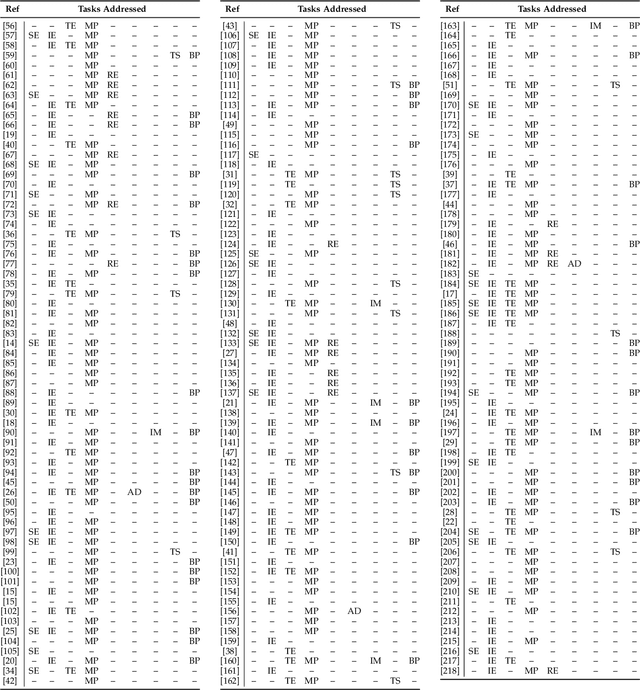
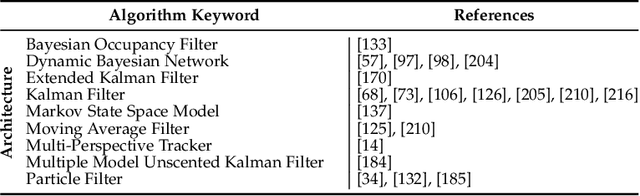
We present a review and taxonomy of 200 models from the literature on driver behavior modeling. We begin by introducing a mathematical formulation based on the partially observable stochastic game, which serves as a common framework for comparing and contrasting different driver models. Our taxonomy is constructed around the core modeling tasks of state estimation, intention estimation, trait estimation, and motion prediction, and also discusses the auxiliary tasks of risk estimation, anomaly detection, behavior imitation and microscopic traffic simulation. Existing driver models are categorized based on the specific tasks they address and key attributes of their approach.
Online Parameter Estimation for Human Driver Behavior Prediction
May 06, 2020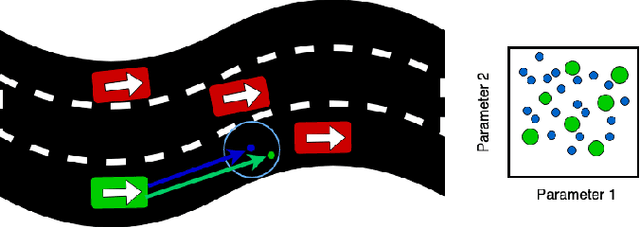
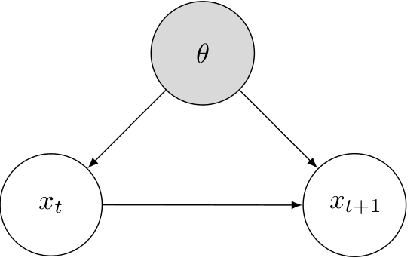
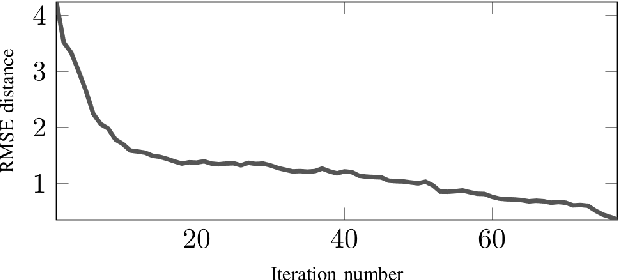
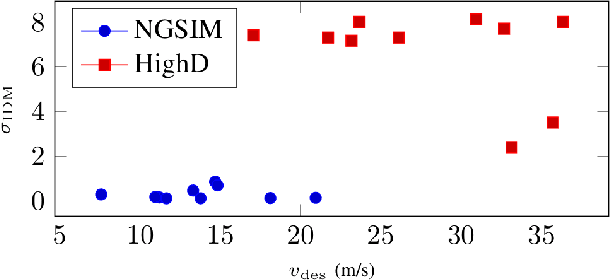
Driver models are invaluable for planning in autonomous vehicles as well as validating their safety in simulation. Highly parameterized black-box driver models are very expressive, and can capture nuanced behavior. However, they usually lack interpretability and sometimes exhibit unrealistic-even dangerous-behavior. Rule-based models are interpretable, and can be designed to guarantee "safe" behavior, but are less expressive due to their low number of parameters. In this article, we show that online parameter estimation applied to the Intelligent Driver Model captures nuanced individual driving behavior while providing collision free trajectories. We solve the online parameter estimation problem using particle filtering, and benchmark performance against rule-based and black-box driver models on two real world driving data sets. We evaluate the closeness of our driver model to ground truth data demonstration and also assess the safety of the resulting emergent driving behavior.
STT-CBS: A Conflict-Based Search Algorithm for Multi-Agent Path Finding with Stochastic Travel Times
Apr 17, 2020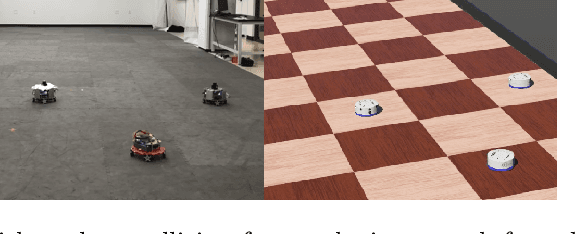
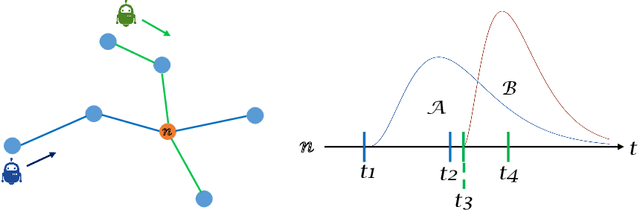
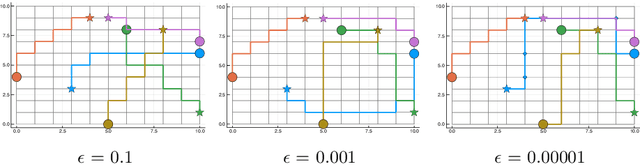
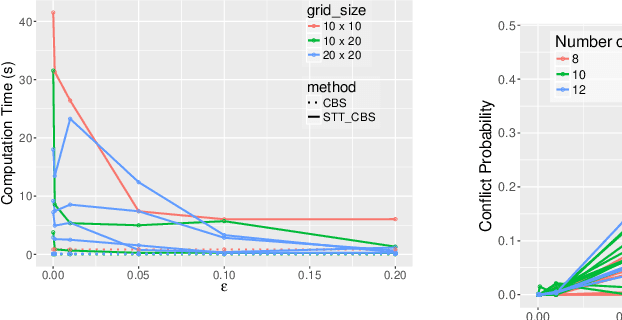
We address the Multi-Agent Path Finding problem on a graph for agents assigned to goals in a known environment and under uncertainty. Our algorithm, called STT-CBS, uses Conflict-Based Search (CBS) with a stochastic travel time (STT) model for the agents. We model robot travel time along each edge of the graph by independent gamma-distributed random variables and propose probabilistic conflict identification and constraint creation methods to robustly handle travel time uncertainty. We show that under reasonable assumptions our algorithm is complete and optimal in terms of expected sum of travel times, while ensuring an upper bound on each pairwise conflict probability. Simulations and hardware experiments show that STT-CBS is able to significantly decrease conflict probability over CBS, while remaining within the same complexity class.
Multi-Fidelity Recursive Behavior Prediction
Dec 18, 2018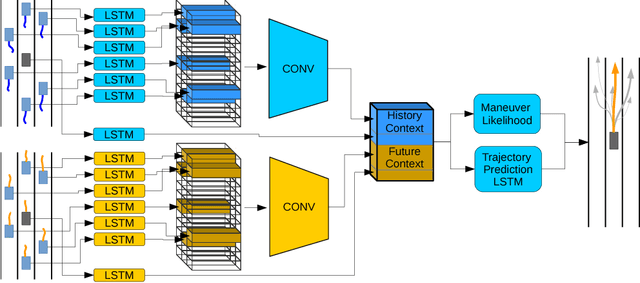
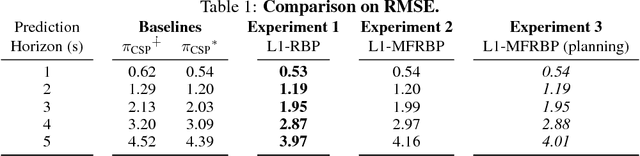
Predicting the behavior of surrounding vehicles is a critical problem in automated driving. We present a novel game theoretic behavior prediction model that achieves state of the art prediction accuracy by explicitly reasoning about possible future interaction between agents. We evaluate our approach on the NGSIM vehicle trajectory data set and demonstrate lower root mean square error than state-of-the-art methods.
HELOC Applicant Risk Performance Evaluation by Topological Hierarchical Decomposition
Nov 26, 2018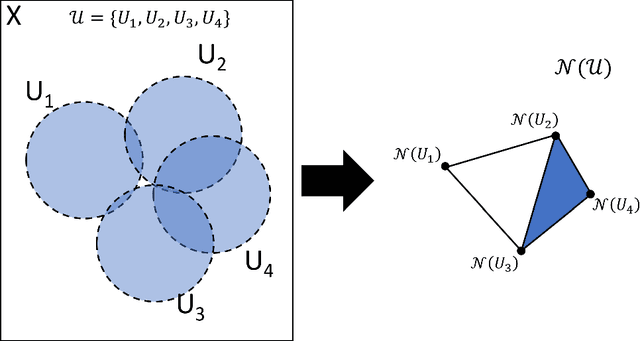
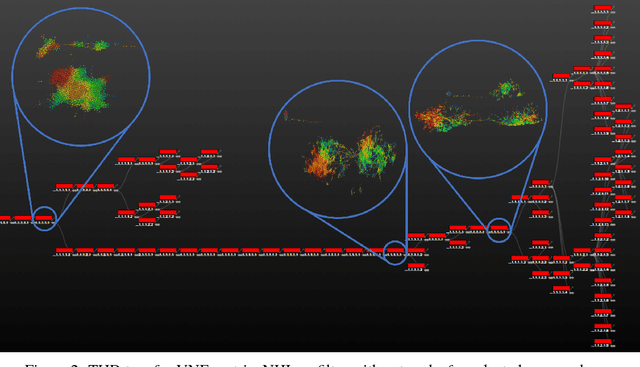
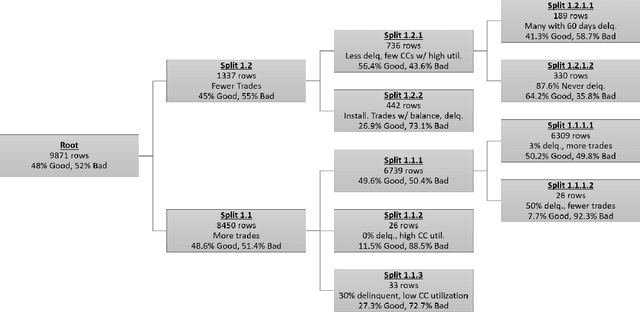

Strong regulations in the financial industry mean that any decisions based on machine learning need to be explained. This precludes the use of powerful supervised techniques such as neural networks. In this study we propose a new unsupervised and semi-supervised technique known as the topological hierarchical decomposition (THD). This process breaks a dataset down into ever smaller groups, where groups are associated with a simplicial complex that approximate the underlying topology of a dataset. We apply THD to the FICO machine learning challenge dataset, consisting of anonymized home equity loan applications using the MAPPER algorithm to build simplicial complexes. We identify different groups of individuals unable to pay back loans, and illustrate how the distribution of feature values in a simplicial complex can be used to explain the decision to grant or deny a loan by extracting illustrative explanations from two THDs on the dataset.
Realistic Traffic Generation for Web Robots
Dec 15, 2017
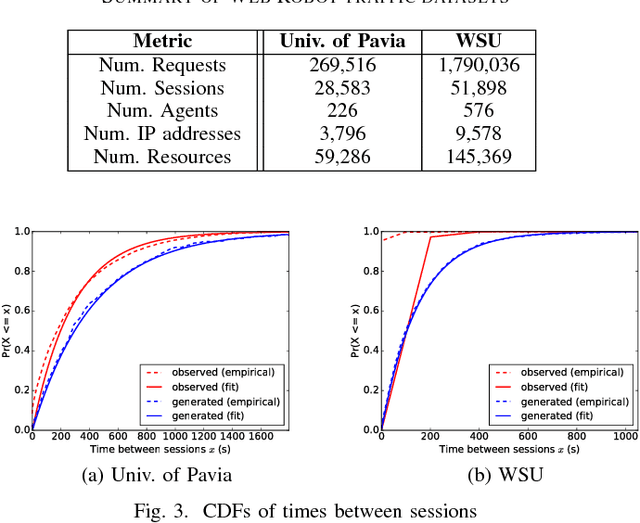
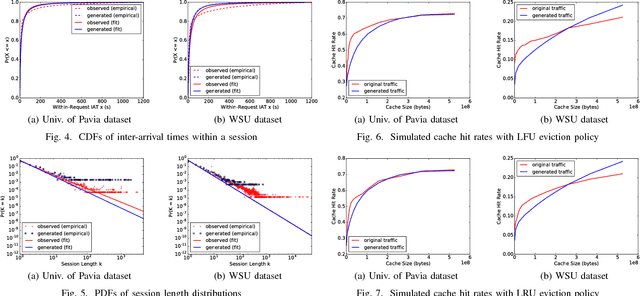
Critical to evaluating the capacity, scalability, and availability of web systems are realistic web traffic generators. Web traffic generation is a classic research problem, no generator accounts for the characteristics of web robots or crawlers that are now the dominant source of traffic to a web server. Administrators are thus unable to test, stress, and evaluate how their systems perform in the face of ever increasing levels of web robot traffic. To resolve this problem, this paper introduces a novel approach to generate synthetic web robot traffic with high fidelity. It generates traffic that accounts for both the temporal and behavioral qualities of robot traffic by statistical and Bayesian models that are fitted to the properties of robot traffic seen in web logs from North America and Europe. We evaluate our traffic generator by comparing the characteristics of generated traffic to those of the original data. We look at session arrival rates, inter-arrival times and session lengths, comparing and contrasting them between generated and real traffic. Finally, we show that our generated traffic affects cache performance similarly to actual traffic, using the common LRU and LFU eviction policies.