 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Fidelity Recursive Behavior Prediction
Dec 18, 2018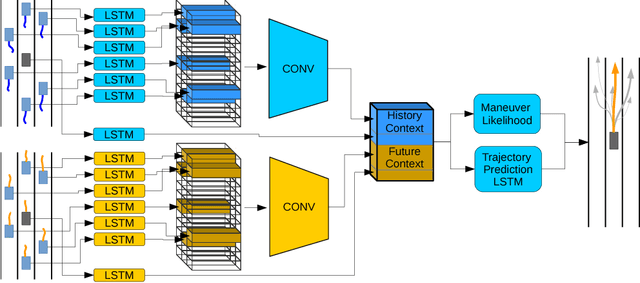
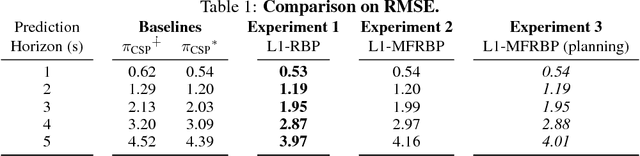
Predicting the behavior of surrounding vehicles is a critical problem in automated driving. We present a novel game theoretic behavior prediction model that achieves state of the art prediction accuracy by explicitly reasoning about possible future interaction between agents. We evaluate our approach on the NGSIM vehicle trajectory data set and demonstrate lower root mean square error than state-of-the-art methods.
Risk-averse Behavior Planning for Autonomous Driving under Uncertainty
Dec 04, 2018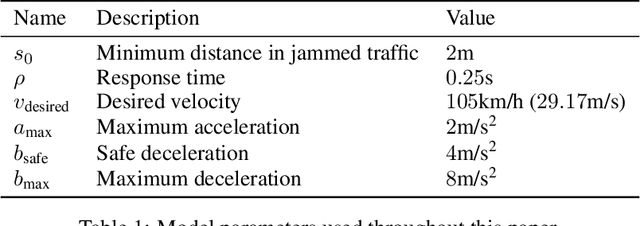
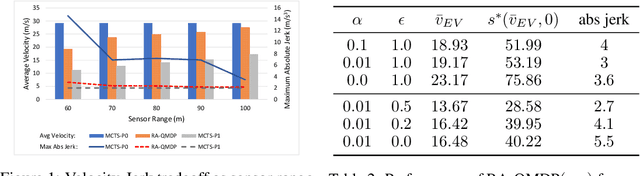
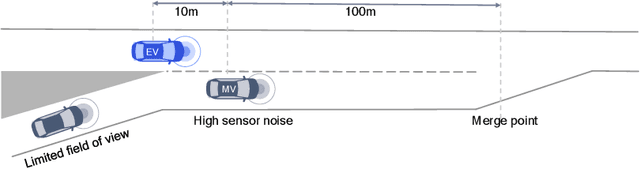
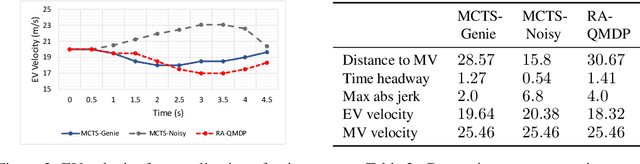
Autonomous vehicles have to navigate the surrounding environment with partial observability of other objects sharing the road. Sources of uncertainty in autonomous vehicle measurements include sensor fusion errors, limited sensor range due to weather or object detection latency, occlusion, and hidden parameters such as other human driver intentions. Behavior planning must consider all sources of uncertainty in deciding future vehicle maneuvers. This paper presents a scalable framework for risk-averse behavior planning under uncertainty by incorporating QMDP, unscented transform, and Monte Carlo tree search (MCTS). It is shown that upper confidence bound (UCB) for expanding the tree results in noisy Q-value estimates by the MCTS and a degraded performance of QMDP. A modification to action selection procedure in MCTS is proposed to achieve robust performance.