 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSTT-CBS: A Conflict-Based Search Algorithm for Multi-Agent Path Finding with Stochastic Travel Times
Paper and Code
Apr 17, 2020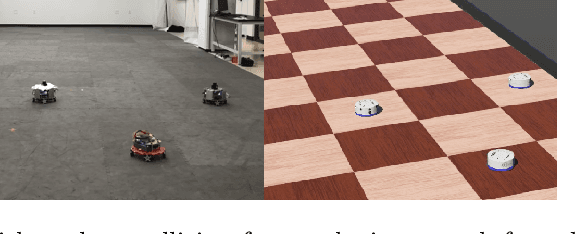
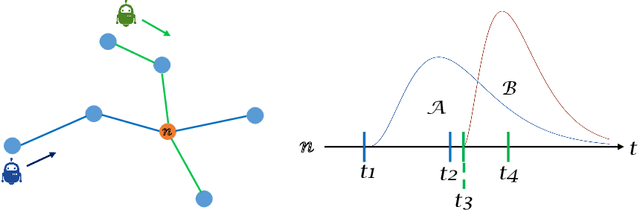
We address the Multi-Agent Path Finding problem on a graph for agents assigned to goals in a known environment and under uncertainty. Our algorithm, called STT-CBS, uses Conflict-Based Search (CBS) with a stochastic travel time (STT) model for the agents. We model robot travel time along each edge of the graph by independent gamma-distributed random variables and propose probabilistic conflict identification and constraint creation methods to robustly handle travel time uncertainty. We show that under reasonable assumptions our algorithm is complete and optimal in terms of expected sum of travel times, while ensuring an upper bound on each pairwise conflict probability. Simulations and hardware experiments show that STT-CBS is able to significantly decrease conflict probability over CBS, while remaining within the same complexity class.