 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe and Efficient Navigation in Extreme Environments using Semantic Belief Graphs
Apr 02, 2023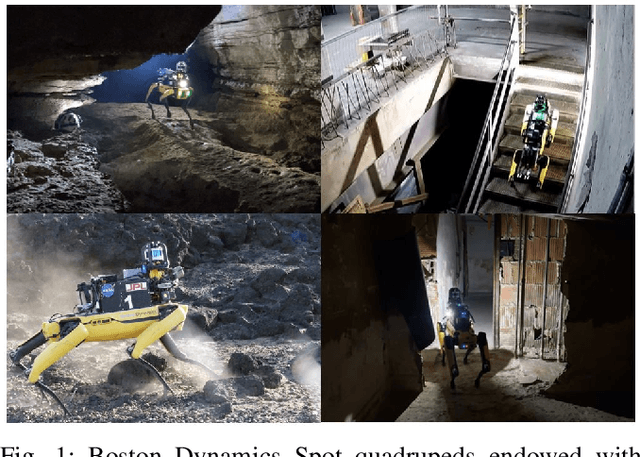
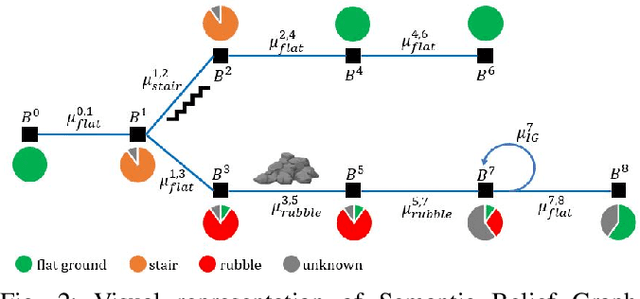
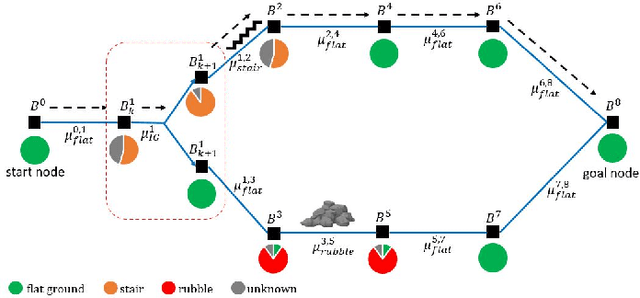
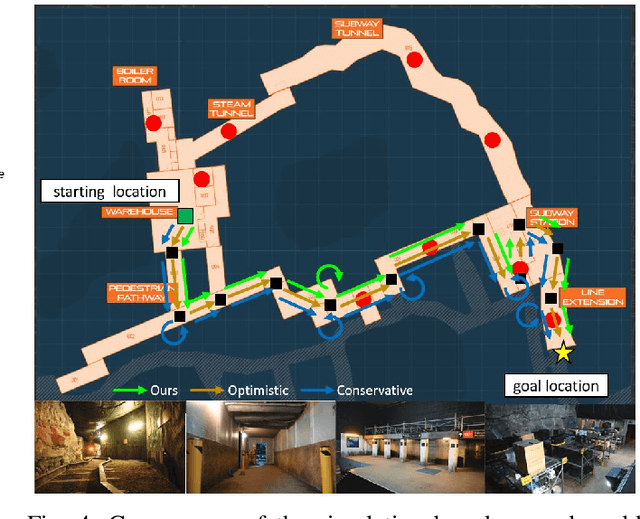
To achieve autonomy in unknown and unstructured environments, we propose a method for semantic-based planning under perceptual uncertainty. This capability is crucial for safe and efficient robot navigation in environment with mobility-stressing elements that require terrain-specific locomotion policies. We propose the Semantic Belief Graph (SBG), a geometric- and semantic-based representation of a robot's probabilistic roadmap in the environment. The SBG nodes comprise of the robot geometric state and the semantic-knowledge of the terrains in the environment. The SBG edges represent local semantic-based controllers that drive the robot between the nodes or invoke an information gathering action to reduce semantic belief uncertainty. We formulate a semantic-based planning problem on SBG that produces a policy for the robot to safely navigate to the target location with minimal traversal time. We analyze our method in simulation and present real-world results with a legged robotic platform navigating multi-level outdoor environments.
Incorporating Human Path Preferences in Robot Navigation with Minimal Interventions
Mar 16, 2023
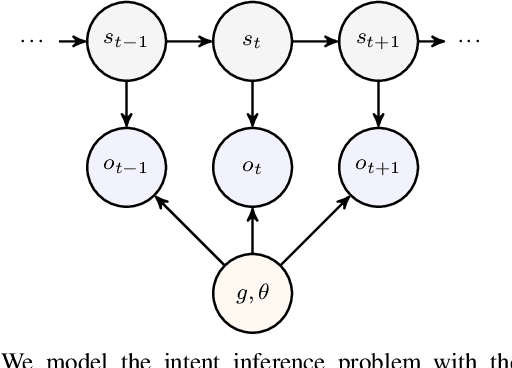


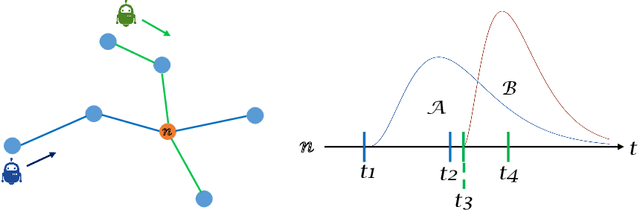
Robots that can effectively understand human intentions from actions are crucial for successful human-robot collaboration. In this work, we address the challenge of a robot navigating towards an unknown goal while also accounting for a human's preference for a particular path in the presence of obstacles. This problem is particularly challenging when both the goal and path preference are unknown a priori. To overcome this challenge, we propose a method for encoding and inferring path preference online using a partitioning of the space into polytopes. Our approach enables joint inference over the goal and path preference using a stochastic observation model for the human. We evaluate our method on an unknown-goal navigation problem with sparse human interventions, and find that it outperforms baseline approaches as the human's inputs become increasingly sparse. We find that the time required to update the robot's belief does not increase with the complexity of the environment, which makes our method suitable for online applications.
Fast and Scalable Signal Inference for Active Robotic Source Seeking
Jan 06, 2023



In active source seeking, a robot takes repeated measurements in order to locate a signal source in a cluttered and unknown environment. A key component of an active source seeking robot planner is a model that can produce estimates of the signal at unknown locations with uncertainty quantification. This model allows the robot to plan for future measurements in the environment. Traditionally, this model has been in the form of a Gaussian process, which has difficulty scaling and cannot represent obstacles. %In this work, We propose a global and local factor graph model for active source seeking, which allows the model to scale to a large number of measurements and represent unknown obstacles in the environment. We combine this model with extensions to a highly scalable planner to form a system for large-scale active source seeking. We demonstrate that our approach outperforms baseline methods in both simulated and real robot experiments.
Risk-aware Meta-level Decision Making for Exploration Under Uncertainty
Sep 12, 2022
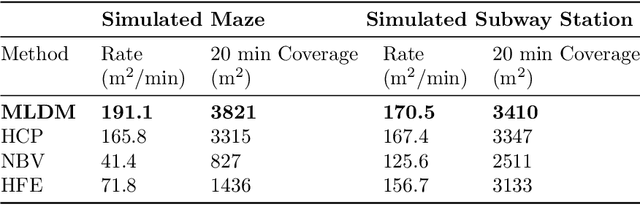
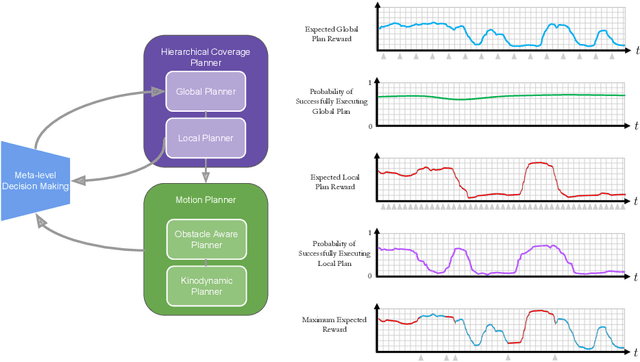
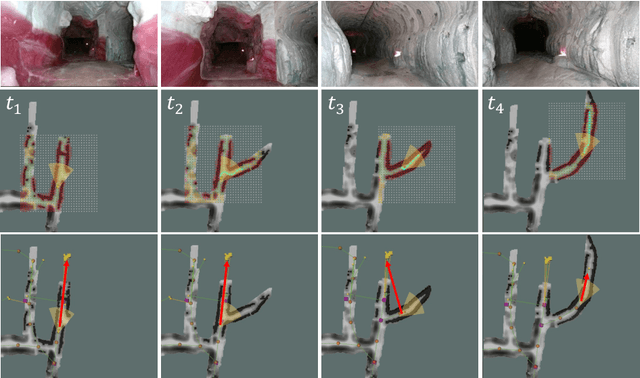
Robotic exploration of unknown environments is fundamentally a problem of decision making under uncertainty where the robot must account for uncertainty in sensor measurements, localization, action execution, as well as many other factors. For large-scale exploration applications, autonomous systems must overcome the challenges of sequentially deciding which areas of the environment are valuable to explore while safely evaluating the risks associated with obstacles and hazardous terrain. In this work, we propose a risk-aware meta-level decision making framework to balance the tradeoffs associated with local and global exploration. Meta-level decision making builds upon classical hierarchical coverage planners by switching between local and global policies with the overall objective of selecting the policy that is most likely to maximize reward in a stochastic environment. We use information about the environment history, traversability risk, and kinodynamic constraints to reason about the probability of successful policy execution to switch between local and global policies. We have validated our solution in both simulation and on a variety of large-scale real world hardware tests. Our results show that by balancing local and global exploration we are able to significantly explore large-scale environments more efficiently.
FIG-OP: Exploring Large-Scale Unknown Environments on a Fixed Time Budget
Mar 12, 2022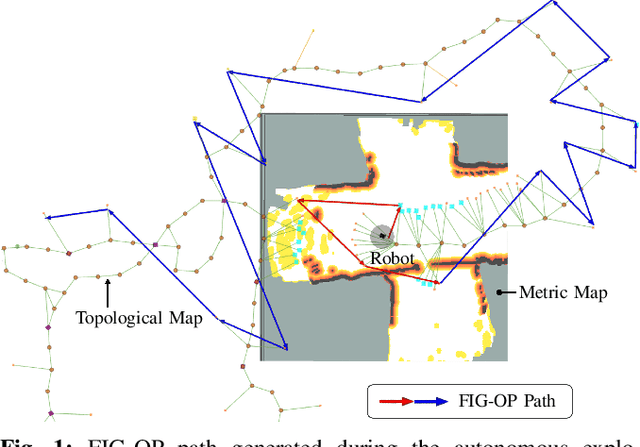
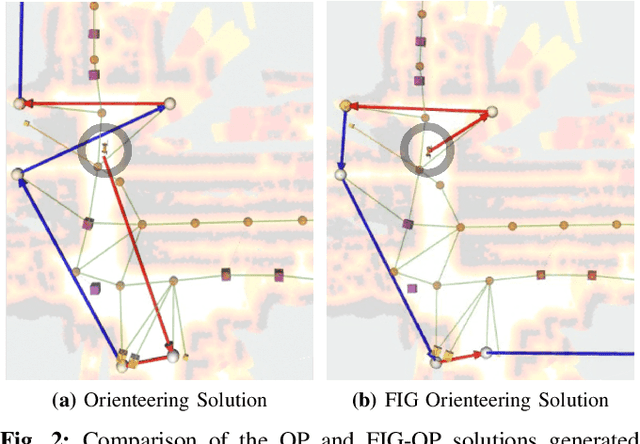
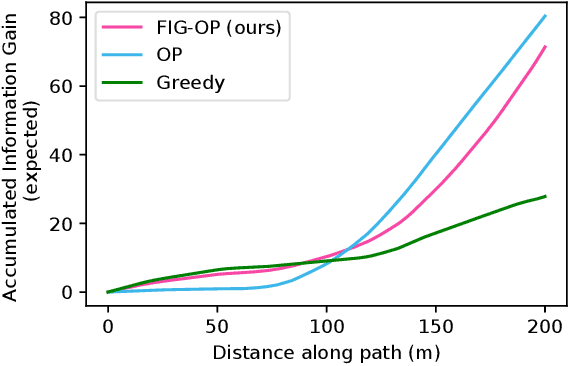
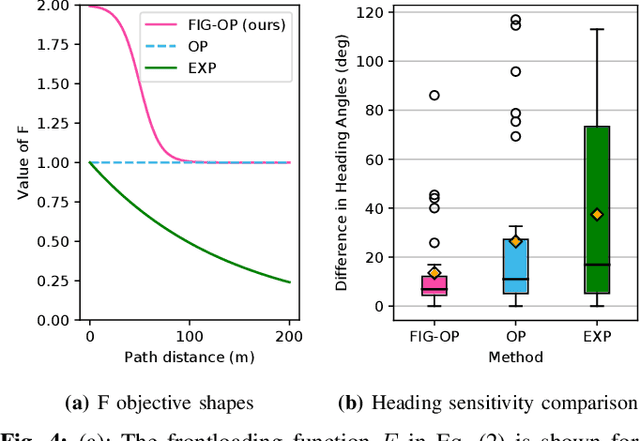
We present a method for autonomous exploration of large-scale unknown environments under mission time constraints. We start by proposing the Frontloaded Information Gain Orienteering Problem (FIG-OP) -- a generalization of the traditional orienteering problem where the assumption of a reliable environmental model no longer holds. The FIG-OP addresses model uncertainty by frontloading expected information gain through the addition of a greedy incentive, effectively expediting the moment in which new area is uncovered. In order to reason across multi-kilometre environments, we solve FIG-OP over an information-efficient world representation, constructed through the aggregation of information from a topological and metric map. Our method was extensively tested and field-hardened across various complex environments, ranging from subway systems to mines. In comparative simulations, we observe that the FIG-OP solution exhibits improved coverage efficiency over solutions generated by greedy and traditional orienteering-based approaches (i.e. severe and minimal model uncertainty assumptions, respectively).
Optimal Sequential Task Assignment and Path Finding for Multi-Agent Robotic Assembly Planning
Jun 16, 2020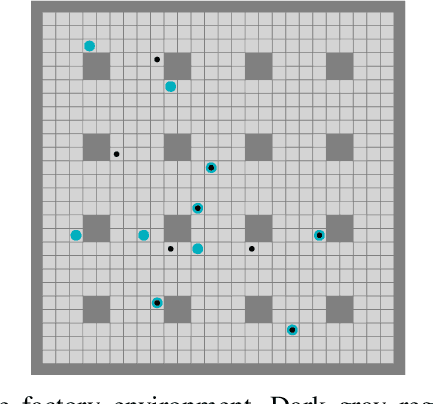


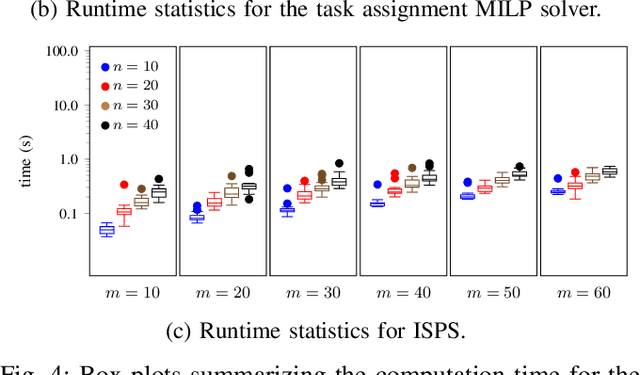
We study the problem of sequential task assignment and collision-free routing for large teams of robots in applications with inter-task precedence constraints (e.g., task $A$ and task $B$ must both be completed before task $C$ may begin). Such problems commonly occur in assembly planning for robotic manufacturing applications, in which sub-assemblies must be completed before they can be combined to form the final product. We propose a hierarchical algorithm for computing makespan-optimal solutions to the problem. The algorithm is evaluated on a set of randomly generated problem instances where robots must transport objects between stations in a "factory "grid world environment. In addition, we demonstrate in high-fidelity simulation that the output of our algorithm can be used to generate collision-free trajectories for non-holonomic differential-drive robots.
* Presented at International Conference on Robotics and Automation (ICRA) 2020
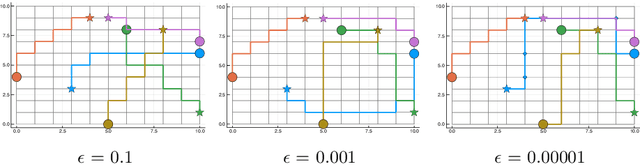
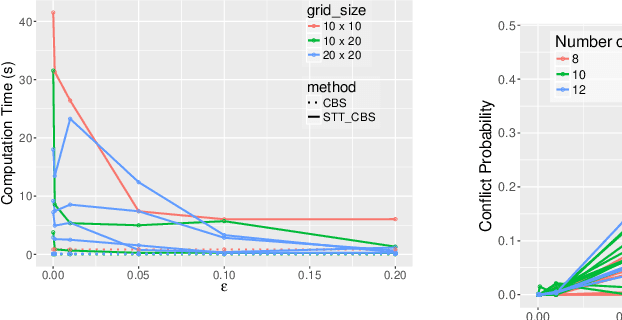
STT-CBS: A Conflict-Based Search Algorithm for Multi-Agent Path Finding with Stochastic Travel Times
Apr 17, 2020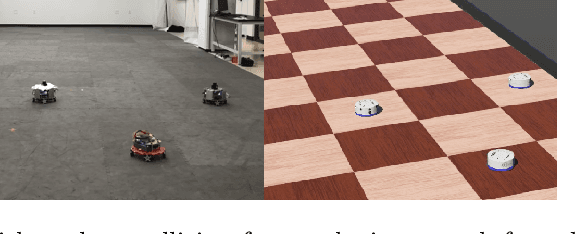
We address the Multi-Agent Path Finding problem on a graph for agents assigned to goals in a known environment and under uncertainty. Our algorithm, called STT-CBS, uses Conflict-Based Search (CBS) with a stochastic travel time (STT) model for the agents. We model robot travel time along each edge of the graph by independent gamma-distributed random variables and propose probabilistic conflict identification and constraint creation methods to robustly handle travel time uncertainty. We show that under reasonable assumptions our algorithm is complete and optimal in terms of expected sum of travel times, while ensuring an upper bound on each pairwise conflict probability. Simulations and hardware experiments show that STT-CBS is able to significantly decrease conflict probability over CBS, while remaining within the same complexity class.