 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal Sequential Task Assignment and Path Finding for Multi-Agent Robotic Assembly Planning
Paper and Code
Jun 16, 2020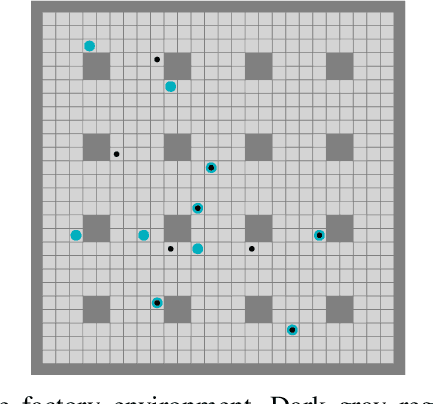


We study the problem of sequential task assignment and collision-free routing for large teams of robots in applications with inter-task precedence constraints (e.g., task $A$ and task $B$ must both be completed before task $C$ may begin). Such problems commonly occur in assembly planning for robotic manufacturing applications, in which sub-assemblies must be completed before they can be combined to form the final product. We propose a hierarchical algorithm for computing makespan-optimal solutions to the problem. The algorithm is evaluated on a set of randomly generated problem instances where robots must transport objects between stations in a "factory "grid world environment. In addition, we demonstrate in high-fidelity simulation that the output of our algorithm can be used to generate collision-free trajectories for non-holonomic differential-drive robots.