 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Addendum to NeBula: Towards Extending TEAM CoSTAR's Solution to Larger Scale Environments
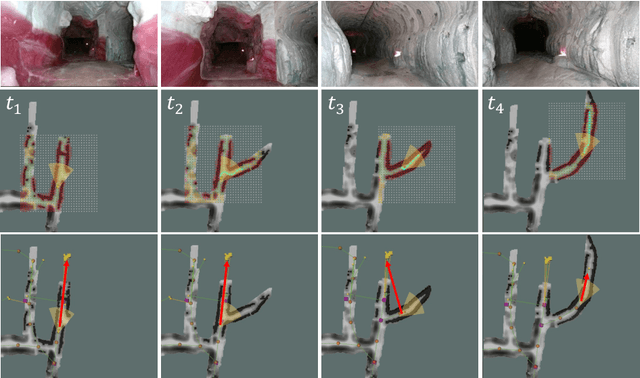
Apr 18, 2025This paper presents an appendix to the original NeBula autonomy solution developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), participating in the DARPA Subterranean Challenge. Specifically, this paper presents extensions to NeBula's hardware, software, and algorithmic components that focus on increasing the range and scale of the exploration environment. From the algorithmic perspective, we discuss the following extensions to the original NeBula framework: (i) large-scale geometric and semantic environment mapping; (ii) an adaptive positioning system; (iii) probabilistic traversability analysis and local planning; (iv) large-scale POMDP-based global motion planning and exploration behavior; (v) large-scale networking and decentralized reasoning; (vi) communication-aware mission planning; and (vii) multi-modal ground-aerial exploration solutions. We demonstrate the application and deployment of the presented systems and solutions in various large-scale underground environments, including limestone mine exploration scenarios as well as deployment in the DARPA Subterranean challenge.
Physics-informed Gaussian Processes for Safe Envelope Expansion
Jan 02, 2025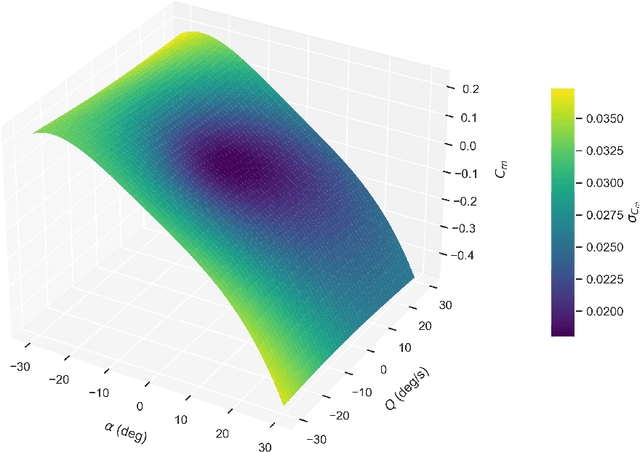
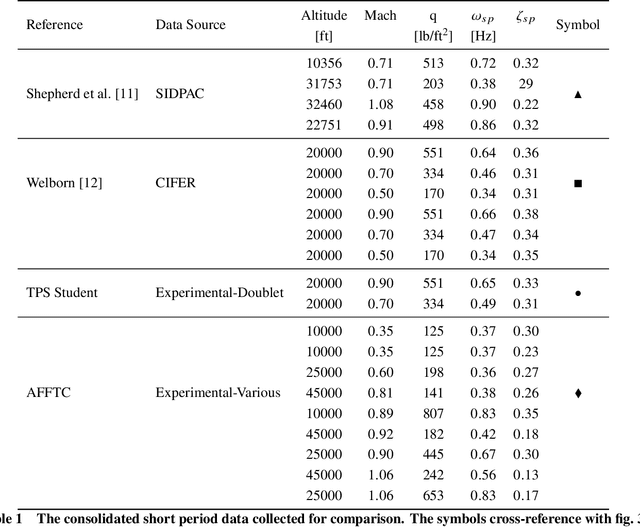
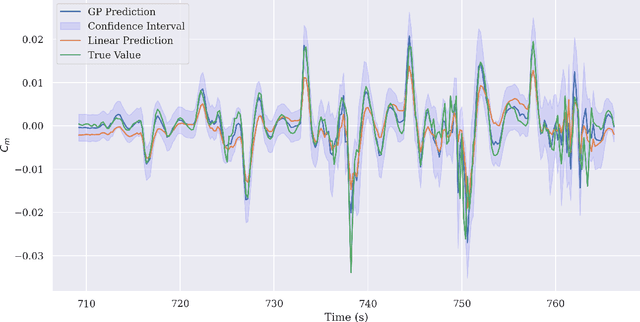
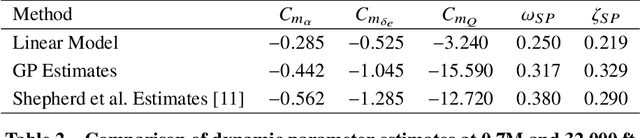
Flight test analysis often requires predefined test points with arbitrarily tight tolerances, leading to extensive and resource-intensive experimental campaigns. To address this challenge, we propose a novel approach to flight test analysis using Gaussian processes (GPs) with physics-informed mean functions to estimate aerodynamic quantities from arbitrary flight test data, validated using real T-38 aircraft data collected in collaboration with the United States Air Force Test Pilot School. We demonstrate our method by estimating the pitching moment coefficient without requiring predefined or repeated flight test points, significantly reducing the need for extensive experimental campaigns. Our approach incorporates aerodynamic models as priors within the GP framework, enhancing predictive accuracy across diverse flight conditions and providing robust uncertainty quantification. Key contributions include the integration of physics-based priors in a probabilistic model, which allows for precise computation from arbitrary flight test maneuvers, and the demonstration of our method capturing relevant dynamic characteristics such as short-period mode behavior. The proposed framework offers a scalable and generalizable solution for efficient data-driven flight test analysis and is able to accurately predict the short period frequency and damping for the T-38 across several Mach and dynamic pressure profiles.
Trajectory Optimization for Adaptive Informative Path Planning with Multimodal Sensing
Apr 29, 2024We consider the problem of an autonomous agent equipped with multiple sensors, each with different sensing precision and energy costs. The agent's goal is to explore the environment and gather information subject to its resource constraints in unknown, partially observable environments. The challenge lies in reasoning about the effects of sensing and movement while respecting the agent's resource and dynamic constraints. We formulate the problem as a trajectory optimization problem and solve it using a projection-based trajectory optimization approach where the objective is to reduce the variance of the Gaussian process world belief. Our approach outperforms previous approaches in long horizon trajectories by achieving an overall variance reduction of up to 85% and reducing the root-mean square error in the environment belief by 50%. This approach was developed in support of rover path planning for the NASA VIPER Mission.
Robotic Learning for Adaptive Informative Path Planning
Apr 15, 2024Adaptive informative path planning (AIPP) is important to many robotics applications, enabling mobile robots to efficiently collect useful data about initially unknown environments. In addition, learning-based methods are increasingly used in robotics to enhance adaptability, versatility, and robustness across diverse and complex tasks. Our survey explores research on applying robotic learning to AIPP, bridging the gap between these two research fields. We begin by providing a unified mathematical framework for general AIPP problems. Next, we establish two complementary taxonomies of current work from the perspectives of (i) learning algorithms and (ii) robotic applications. We explore synergies, recent trends, and highlight the benefits of learning-based methods in AIPP frameworks. Finally, we discuss key challenges and promising future directions to enable more generally applicable and robust robotic data-gathering systems through learning. We provide a comprehensive catalogue of papers reviewed in our survey, including publicly available repositories, to facilitate future studies in the field.
Approximate Sequential Optimization for Informative Path Planning
Feb 13, 2024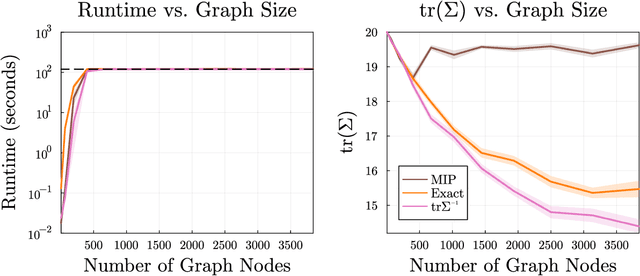
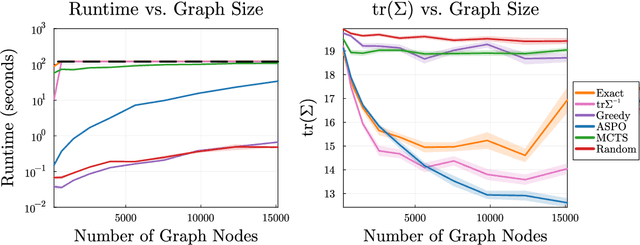
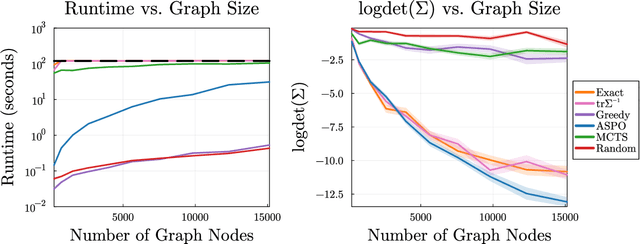
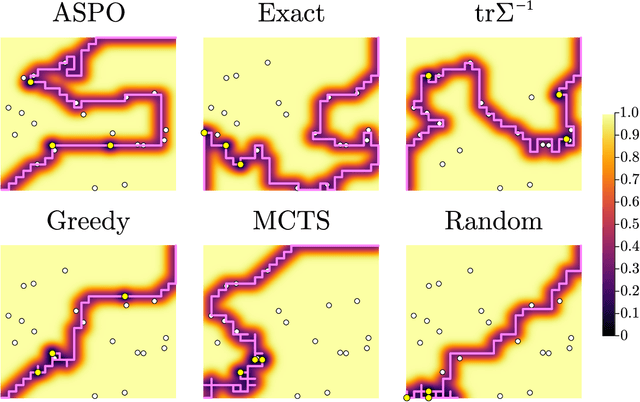
We consider the problem of finding an informative path through a graph, given initial and terminal nodes and a given maximum path length. We assume that a linear noise corrupted measurement is taken at each node of an underlying unknown vector that we wish to estimate. The informativeness is measured by the reduction in uncertainty in our estimate, evaluated using several metrics. We present a convex relaxation for this informative path planning problem, which we can readily solve to obtain a bound on the possible performance. We develop an approximate sequential method where the path is constructed segment by segment through dynamic programming. This involves solving an orienteering problem, with the node reward acting as a surrogate for informativeness, taking the first step, and then repeating the process. The method scales to very large problem instances and achieves performance not too far from the bound produced by the convex relaxation. We also demonstrate our method's ability to handle adaptive objectives, multimodal sensing, and multi-agent variations of the informative path planning problem.
Safe and Efficient Navigation in Extreme Environments using Semantic Belief Graphs
Apr 02, 2023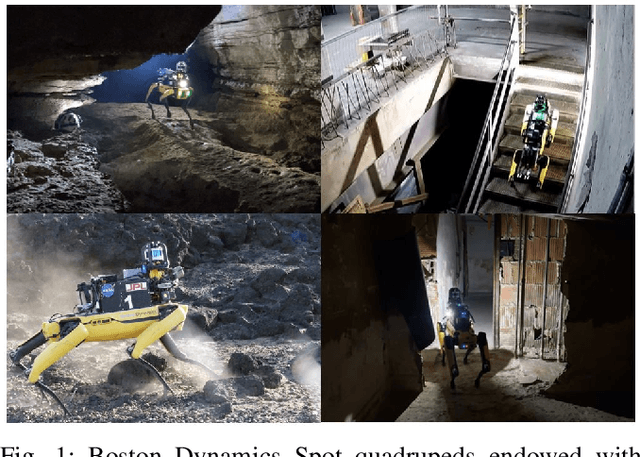
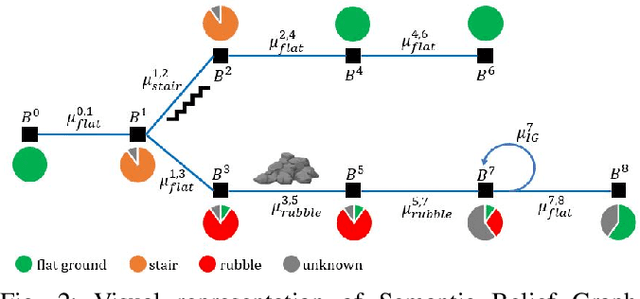
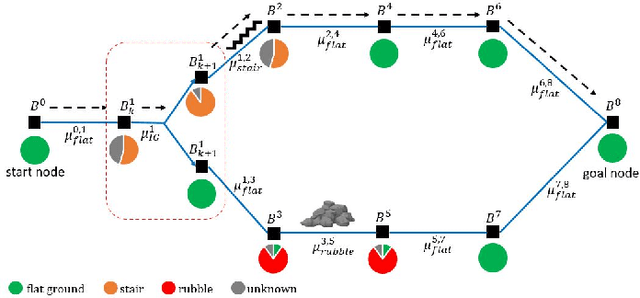
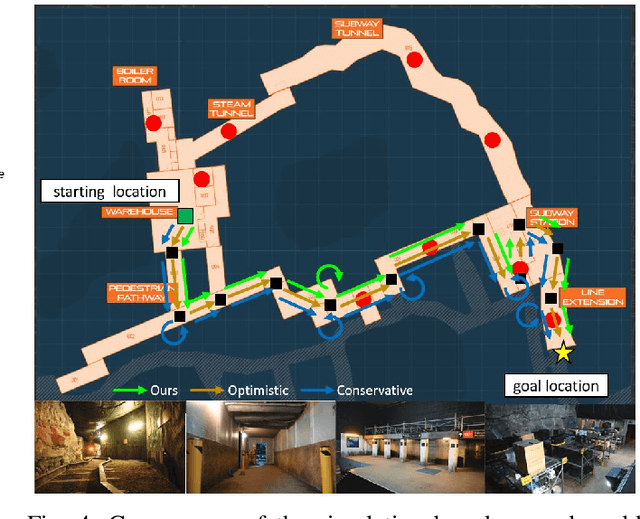
To achieve autonomy in unknown and unstructured environments, we propose a method for semantic-based planning under perceptual uncertainty. This capability is crucial for safe and efficient robot navigation in environment with mobility-stressing elements that require terrain-specific locomotion policies. We propose the Semantic Belief Graph (SBG), a geometric- and semantic-based representation of a robot's probabilistic roadmap in the environment. The SBG nodes comprise of the robot geometric state and the semantic-knowledge of the terrains in the environment. The SBG edges represent local semantic-based controllers that drive the robot between the nodes or invoke an information gathering action to reduce semantic belief uncertainty. We formulate a semantic-based planning problem on SBG that produces a policy for the robot to safely navigate to the target location with minimal traversal time. We analyze our method in simulation and present real-world results with a legged robotic platform navigating multi-level outdoor environments.
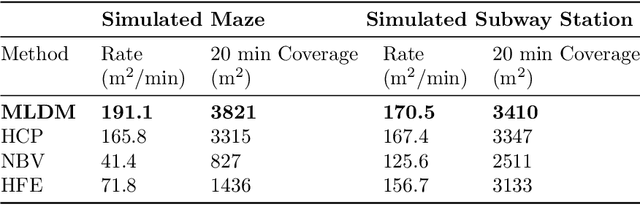
Adaptive Coverage Path Planning for Efficient Exploration of Unknown Environments
Feb 06, 2023



We present a method for solving the coverage problem with the objective of autonomously exploring an unknown environment under mission time constraints. Here, the robot is tasked with planning a path over a horizon such that the accumulated area swept out by its sensor footprint is maximized. Because this problem exhibits a diminishing returns property known as submodularity, we choose to formulate it as a tree-based sequential decision making process. This formulation allows us to evaluate the effects of the robot's actions on future world coverage states, while simultaneously accounting for traversability risk and the dynamic constraints of the robot. To quickly find near-optimal solutions, we propose an effective approximation to the coverage sensor model which adapts to the local environment. Our method was extensively tested across various complex environments and served as the local exploration algorithm for a competing entry in the DARPA Subterranean Challenge.
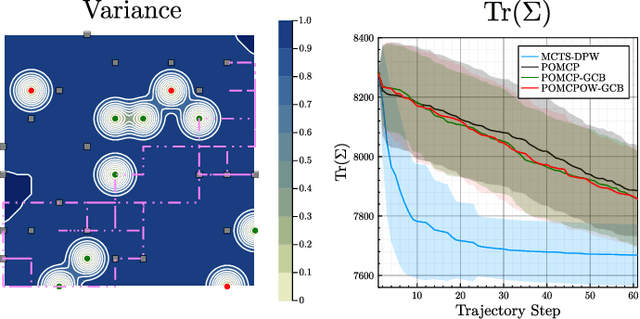
Fast and Scalable Signal Inference for Active Robotic Source Seeking
Jan 06, 2023



In active source seeking, a robot takes repeated measurements in order to locate a signal source in a cluttered and unknown environment. A key component of an active source seeking robot planner is a model that can produce estimates of the signal at unknown locations with uncertainty quantification. This model allows the robot to plan for future measurements in the environment. Traditionally, this model has been in the form of a Gaussian process, which has difficulty scaling and cannot represent obstacles. %In this work, We propose a global and local factor graph model for active source seeking, which allows the model to scale to a large number of measurements and represent unknown obstacles in the environment. We combine this model with extensions to a highly scalable planner to form a system for large-scale active source seeking. We demonstrate that our approach outperforms baseline methods in both simulated and real robot experiments.
Sequential Bayesian Optimization for Adaptive Informative Path Planning with Multimodal Sensing
Sep 16, 2022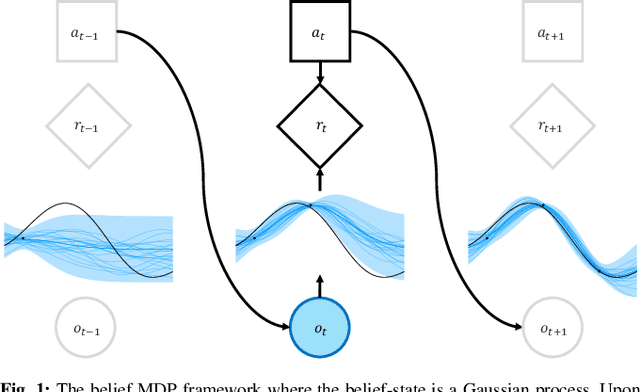


Adaptive Informative Path Planning with Multimodal Sensing (AIPPMS) considers the problem of an agent equipped with multiple sensors, each with different sensing accuracy and energy costs. The agent's goal is to explore the environment and gather information subject to its resource constraints in unknown, partially observable environments. Previous work has focused on the less general Adaptive Informative Path Planning (AIPP) problem, which considers only the effect of the agent's movement on received observations. The AIPPMS problem adds additional complexity by requiring that the agent reasons jointly about the effects of sensing and movement while balancing resource constraints with information objectives. We formulate the AIPPMS problem as a belief Markov decision process with Gaussian process beliefs and solve it using a sequential Bayesian optimization approach with online planning. Our approach consistently outperforms previous AIPPMS solutions by more than doubling the average reward received in almost every experiment while also reducing the root-mean-square error in the environment belief by 50%. We completely open-source our implementation to aid in further development and comparison.
Risk-aware Meta-level Decision Making for Exploration Under Uncertainty
Sep 12, 2022
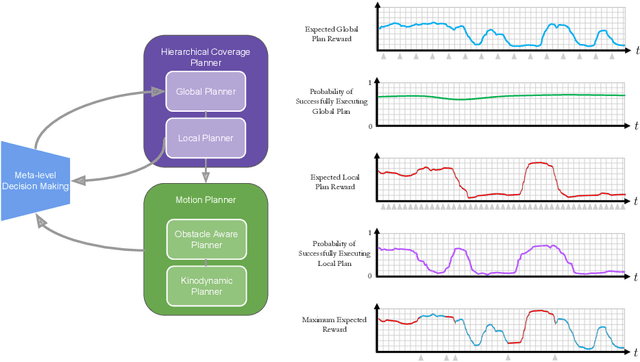
Robotic exploration of unknown environments is fundamentally a problem of decision making under uncertainty where the robot must account for uncertainty in sensor measurements, localization, action execution, as well as many other factors. For large-scale exploration applications, autonomous systems must overcome the challenges of sequentially deciding which areas of the environment are valuable to explore while safely evaluating the risks associated with obstacles and hazardous terrain. In this work, we propose a risk-aware meta-level decision making framework to balance the tradeoffs associated with local and global exploration. Meta-level decision making builds upon classical hierarchical coverage planners by switching between local and global policies with the overall objective of selecting the policy that is most likely to maximize reward in a stochastic environment. We use information about the environment history, traversability risk, and kinodynamic constraints to reason about the probability of successful policy execution to switch between local and global policies. We have validated our solution in both simulation and on a variety of large-scale real world hardware tests. Our results show that by balancing local and global exploration we are able to significantly explore large-scale environments more efficiently.