 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysics-informed Gaussian Processes for Safe Envelope Expansion
Jan 02, 2025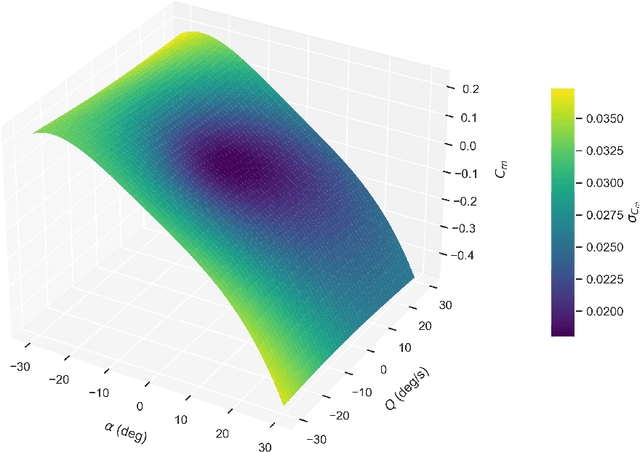
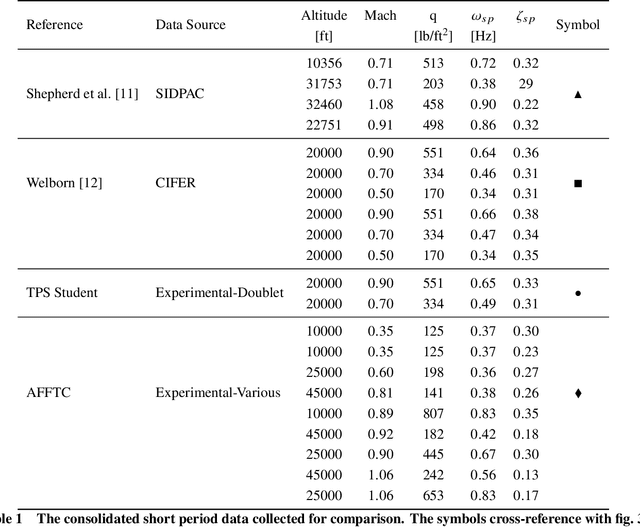
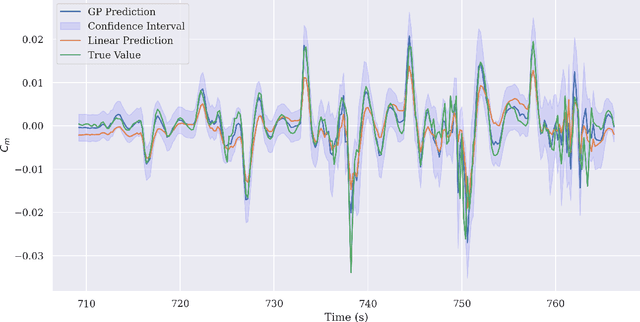
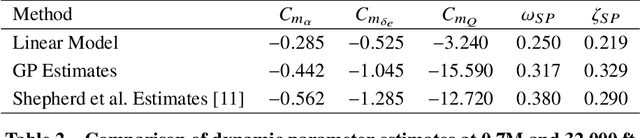
Flight test analysis often requires predefined test points with arbitrarily tight tolerances, leading to extensive and resource-intensive experimental campaigns. To address this challenge, we propose a novel approach to flight test analysis using Gaussian processes (GPs) with physics-informed mean functions to estimate aerodynamic quantities from arbitrary flight test data, validated using real T-38 aircraft data collected in collaboration with the United States Air Force Test Pilot School. We demonstrate our method by estimating the pitching moment coefficient without requiring predefined or repeated flight test points, significantly reducing the need for extensive experimental campaigns. Our approach incorporates aerodynamic models as priors within the GP framework, enhancing predictive accuracy across diverse flight conditions and providing robust uncertainty quantification. Key contributions include the integration of physics-based priors in a probabilistic model, which allows for precise computation from arbitrary flight test maneuvers, and the demonstration of our method capturing relevant dynamic characteristics such as short-period mode behavior. The proposed framework offers a scalable and generalizable solution for efficient data-driven flight test analysis and is able to accurately predict the short period frequency and damping for the T-38 across several Mach and dynamic pressure profiles.
RoboMorph: In-Context Meta-Learning for Robot Dynamics Modeling
Sep 18, 2024



The landscape of Deep Learning has experienced a major shift with the pervasive adoption of Transformer-based architectures, particularly in Natural Language Processing (NLP). Novel avenues for physical applications, such as solving Partial Differential Equations and Image Vision, have been explored. However, in challenging domains like robotics, where high non-linearity poses significant challenges, Transformer-based applications are scarce. While Transformers have been used to provide robots with knowledge about high-level tasks, few efforts have been made to perform system identification. This paper proposes a novel methodology to learn a meta-dynamical model of a high-dimensional physical system, such as the Franka robotic arm, using a Transformer-based architecture without prior knowledge of the system's physical parameters. The objective is to predict quantities of interest (end-effector pose and joint positions) given the torque signals for each joint. This prediction can be useful as a component for Deep Model Predictive Control frameworks in robotics. The meta-model establishes the correlation between torques and positions and predicts the output for the complete trajectory. This work provides empirical evidence of the efficacy of the in-context learning paradigm, suggesting future improvements in learning the dynamics of robotic systems without explicit knowledge of physical parameters. Code, videos, and supplementary materials can be found at project website. See https://sites.google.com/view/robomorph/