 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRLCNet: An end-to-end deep learning framework for simultaneous online calibration of LiDAR, RADAR, and Camera
Dec 09, 2025



Accurate extrinsic calibration of LiDAR, RADAR, and camera sensors is essential for reliable perception in autonomous vehicles. Still, it remains challenging due to factors such as mechanical vibrations and cumulative sensor drift in dynamic environments. This paper presents RLCNet, a novel end-to-end trainable deep learning framework for the simultaneous online calibration of these multimodal sensors. Validated on real-world datasets, RLCNet is designed for practical deployment and demonstrates robust performance under diverse conditions. To support real-time operation, an online calibration framework is introduced that incorporates a weighted moving average and outlier rejection, enabling dynamic adjustment of calibration parameters with reduced prediction noise and improved resilience to drift. An ablation study highlights the significance of architectural choices, while comparisons with existing methods demonstrate the superior accuracy and robustness of the proposed approach.
Augmenting Neural Networks-based Model Approximators in Robotic Force-tracking Tasks
Sep 10, 2025As robotics gains popularity, interaction control becomes crucial for ensuring force tracking in manipulator-based tasks. Typically, traditional interaction controllers either require extensive tuning, or demand expert knowledge of the environment, which is often impractical in real-world applications. This work proposes a novel control strategy leveraging Neural Networks (NNs) to enhance the force-tracking behavior of a Direct Force Controller (DFC). Unlike similar previous approaches, it accounts for the manipulator's tangential velocity, a critical factor in force exertion, especially during fast motions. The method employs an ensemble of feedforward NNs to predict contact forces, then exploits the prediction to solve an optimization problem and generate an optimal residual action, which is added to the DFC output and applied to an impedance controller. The proposed Velocity-augmented Artificial intelligence Interaction Controller for Ambiguous Models (VAICAM) is validated in the Gazebo simulator on a Franka Emika Panda robot. Against a vast set of trajectories, VAICAM achieves superior performance compared to two baseline controllers.
Computer Vision-based Adaptive Control for Back Exoskeleton Performance Optimization
Aug 08, 2025Back exoskeletons can reduce musculoskeletal strain, but their effectiveness depends on support modulation and adaptive control. This study addresses two challenges: defining optimal support strategies and developing adaptive control based on payload estimation. We introduce an optimization space based on muscle activity reduction, perceived discomfort, and user preference, constructing functions to identify optimal strategies. Experiments with 12 subjects revealed optimal operating regions, highlighting the need for dynamic modulation. Based on these insights, we developed a vision-based adaptive control pipeline that estimates payloads in real-time by enhancing exoskeleton contextual understanding, minimising latency and enabling support adaptation within the defined optimisation space. Validation with 12 more subjects showed over 80% accuracy and improvements across all metrics. Compared to static control, adaptive modulation reduced peak back muscle activation by up to 23% while preserving user preference and minimising discomfort. These findings validate the proposed framework and highlight the potential of intelligent, context-aware control in industrial exoskeletons.
Bayesian Optimization applied for accelerated Virtual Validation of the Autonomous Driving Function
Jul 30, 2025Rigorous Verification and Validation (V&V) of Autonomous Driving Functions (ADFs) is paramount for ensuring the safety and public acceptance of Autonomous Vehicles (AVs). Current validation relies heavily on simulation to achieve sufficient test coverage within the Operational Design Domain (ODD) of a vehicle, but exhaustively exploring the vast parameter space of possible scenarios is computationally expensive and time-consuming. This work introduces a framework based on Bayesian Optimization (BO) to accelerate the discovery of critical scenarios. We demonstrate the effectiveness of the framework on an Model Predictive Controller (MPC)-based motion planner, showing that it identifies hazardous situations, such as off-road events, using orders of magnitude fewer simulations than brute-force Design of Experiments (DoE) methods. Furthermore, this study investigates the scalability of the framework in higher-dimensional parameter spaces and its ability to identify multiple, distinct critical regions within the ODD of the motion planner used as the case study .
Robot Drummer: Learning Rhythmic Skills for Humanoid Drumming
Jul 16, 2025
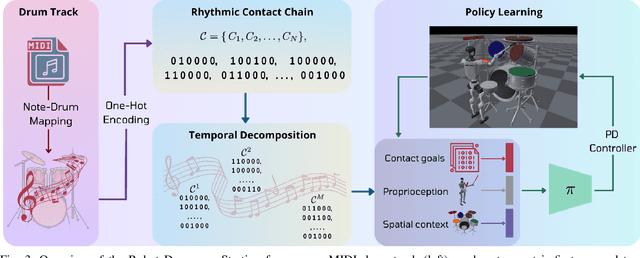

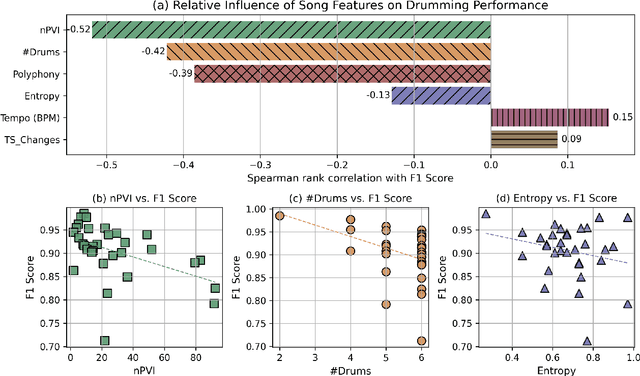
Humanoid robots have seen remarkable advances in dexterity, balance, and locomotion, yet their role in expressive domains such as music performance remains largely unexplored. Musical tasks, like drumming, present unique challenges, including split-second timing, rapid contacts, and multi-limb coordination over performances lasting minutes. In this paper, we introduce Robot Drummer, a humanoid capable of expressive, high-precision drumming across a diverse repertoire of songs. We formulate humanoid drumming as sequential fulfillment of timed contacts and transform drum scores into a Rhythmic Contact Chain. To handle the long-horizon nature of musical performance, we decompose each piece into fixed-length segments and train a single policy across all segments in parallel using reinforcement learning. Through extensive experiments on over thirty popular rock, metal, and jazz tracks, our results demonstrate that Robot Drummer consistently achieves high F1 scores. The learned behaviors exhibit emergent human-like drumming strategies, such as cross-arm strikes, and adaptive stick assignments, demonstrating the potential of reinforcement learning to bring humanoid robots into the domain of creative musical performance. Project page: robotdrummer.github.io
Latent feedback control of distributed systems in multiple scenarios through deep learning-based reduced order models
Dec 13, 2024Continuous monitoring and real-time control of high-dimensional distributed systems are often crucial in applications to ensure a desired physical behavior, without degrading stability and system performances. Traditional feedback control design that relies on full-order models, such as high-dimensional state-space representations or partial differential equations, fails to meet these requirements due to the delay in the control computation, which requires multiple expensive simulations of the physical system. The computational bottleneck is even more severe when considering parametrized systems, as new strategies have to be determined for every new scenario. To address these challenges, we propose a real-time closed-loop control strategy enhanced by nonlinear non-intrusive Deep Learning-based Reduced Order Models (DL-ROMs). Specifically, in the offline phase, (i) full-order state-control pairs are generated for different scenarios through the adjoint method, (ii) the essential features relevant for control design are extracted from the snapshots through a combination of Proper Orthogonal Decomposition (POD) and deep autoencoders, and (iii) the low-dimensional policy bridging latent control and state spaces is approximated with a feedforward neural network. After data generation and neural networks training, the optimal control actions are retrieved in real-time for any observed state and scenario. In addition, the dynamics may be approximated through a cheap surrogate model in order to close the loop at the latent level, thus continuously controlling the system in real-time even when full-order state measurements are missing. The effectiveness of the proposed method, in terms of computational speed, accuracy, and robustness against noisy data, is finally assessed on two different high-dimensional optimal transport problems, one of which also involving an underlying fluid flow.
RoboMorph: In-Context Meta-Learning for Robot Dynamics Modeling
Sep 18, 2024



The landscape of Deep Learning has experienced a major shift with the pervasive adoption of Transformer-based architectures, particularly in Natural Language Processing (NLP). Novel avenues for physical applications, such as solving Partial Differential Equations and Image Vision, have been explored. However, in challenging domains like robotics, where high non-linearity poses significant challenges, Transformer-based applications are scarce. While Transformers have been used to provide robots with knowledge about high-level tasks, few efforts have been made to perform system identification. This paper proposes a novel methodology to learn a meta-dynamical model of a high-dimensional physical system, such as the Franka robotic arm, using a Transformer-based architecture without prior knowledge of the system's physical parameters. The objective is to predict quantities of interest (end-effector pose and joint positions) given the torque signals for each joint. This prediction can be useful as a component for Deep Model Predictive Control frameworks in robotics. The meta-model establishes the correlation between torques and positions and predicts the output for the complete trajectory. This work provides empirical evidence of the efficacy of the in-context learning paradigm, suggesting future improvements in learning the dynamics of robotic systems without explicit knowledge of physical parameters. Code, videos, and supplementary materials can be found at project website. See https://sites.google.com/view/robomorph/
Real-time optimal control of high-dimensional parametrized systems by deep learning-based reduced order models
Sep 09, 2024



Steering a system towards a desired target in a very short amount of time is challenging from a computational standpoint. Indeed, the intrinsically iterative nature of optimal control problems requires multiple simulations of the physical system to be controlled. Moreover, the control action needs to be updated whenever the underlying scenario undergoes variations. Full-order models based on, e.g., the Finite Element Method, do not meet these requirements due to the computational burden they usually entail. On the other hand, conventional reduced order modeling techniques such as the Reduced Basis method, are intrusive, rely on a linear superimposition of modes, and lack of efficiency when addressing nonlinear time-dependent dynamics. In this work, we propose a non-intrusive Deep Learning-based Reduced Order Modeling (DL-ROM) technique for the rapid control of systems described in terms of parametrized PDEs in multiple scenarios. In particular, optimal full-order snapshots are generated and properly reduced by either Proper Orthogonal Decomposition or deep autoencoders (or a combination thereof) while feedforward neural networks are exploited to learn the map from scenario parameters to reduced optimal solutions. Nonlinear dimensionality reduction therefore allows us to consider state variables and control actions that are both low-dimensional and distributed. After (i) data generation, (ii) dimensionality reduction, and (iii) neural networks training in the offline phase, optimal control strategies can be rapidly retrieved in an online phase for any scenario of interest. The computational speedup and the high accuracy obtained with the proposed approach are assessed on different PDE-constrained optimization problems, ranging from the minimization of energy dissipation in incompressible flows modelled through Navier-Stokes equations to the thermal active cooling in heat transfer.
Tactical Game-theoretic Decision-making with Homotopy Class Constraints
Jun 19, 2024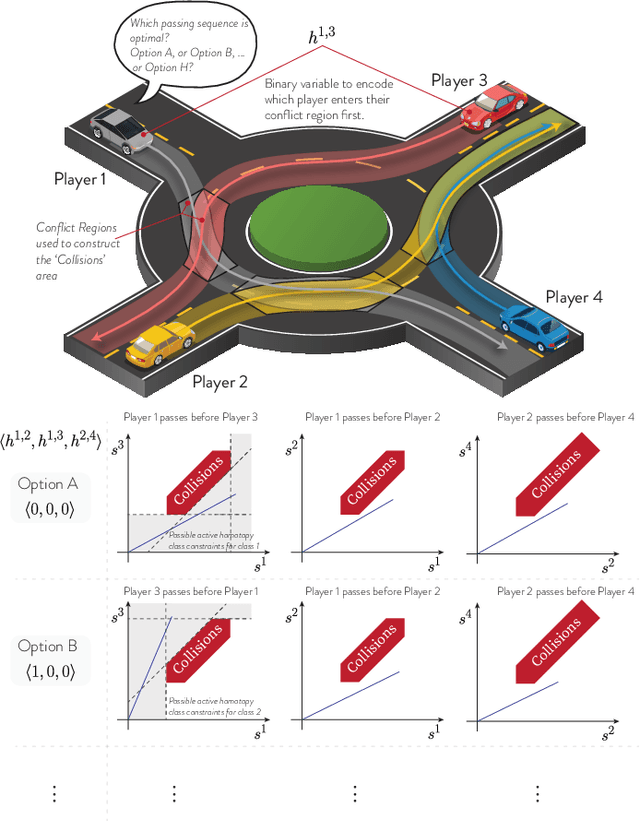
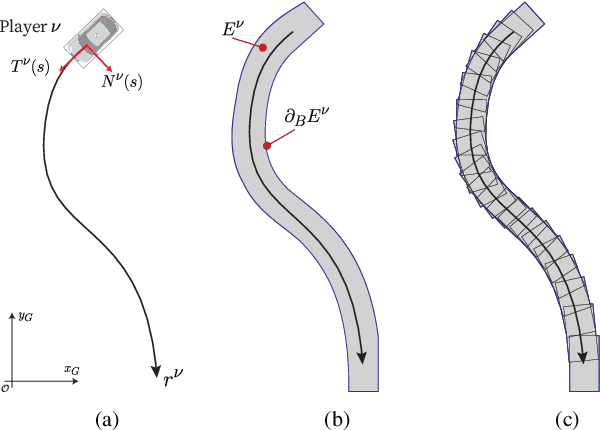
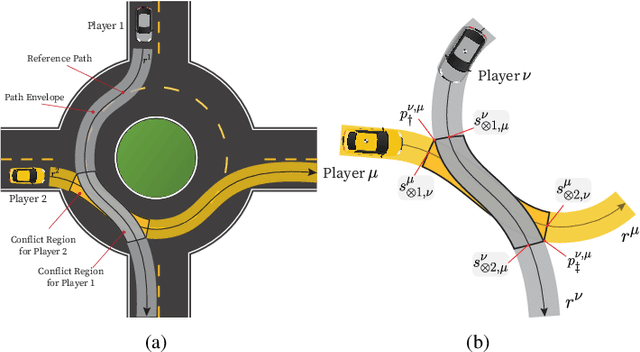
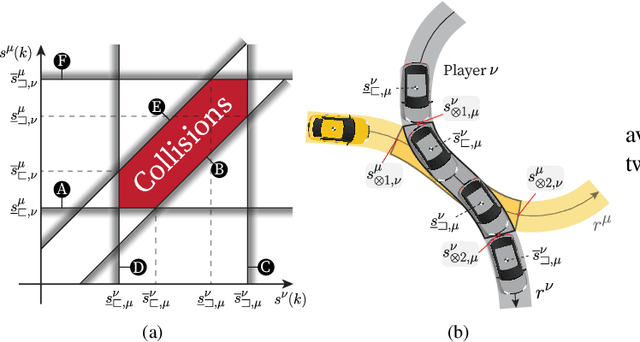
We propose a tactical homotopy-aware decision-making framework for game-theoretic motion planning in urban environments. We model urban driving as a generalized Nash equilibrium problem and employ a mixed-integer approach to tame the combinatorial aspect of motion planning. More specifically, by utilizing homotopy classes, we partition the high-dimensional solution space into finite, well-defined subregions. Each subregion (homotopy) corresponds to a high-level tactical decision, such as the passing order between pairs of players. The proposed formulation allows to find global optimal Nash equilibria in a computationally tractable manner by solving a mixed-integer quadratic program. Each homotopy decision is represented by a binary variable that activates different sets of linear collision avoidance constraints. This extra homotopic constraint allows to find solutions in a more efficient way (on a roundabout scenario on average 5-times faster). We experimentally validate the proposed approach on scenarios taken from the rounD dataset. Simulation-based testing in receding horizon fashion demonstrates the capability of the framework in achieving globally optimal solutions while yielding a 78% average decrease in the computational time with respect to an implementation without the homotopic constraints.
ZAPP! Zonotope Agreement of Prediction and Planning for Continuous-Time Collision Avoidance with Discrete-Time Dynamics
Jun 03, 2024The past few years have seen immense progress on two fronts that are critical to safe, widespread mobile robot deployment: predicting uncertain motion of multiple agents, and planning robot motion under uncertainty. However, the numerical methods required on each front have resulted in a mismatch of representation for prediction and planning. In prediction, numerical tractability is usually achieved by coarsely discretizing time, and by representing multimodal multi-agent interactions as distributions with infinite support. On the other hand, safe planning typically requires very fine time discretization, paired with distributions with compact support, to reduce conservativeness and ensure numerical tractability. The result is, when existing predictors are coupled with planning and control, one may often find unsafe motion plans. This paper proposes ZAPP (Zonotope Agreement of Prediction and Planning) to resolve the representation mismatch. ZAPP unites a prediction-friendly coarse time discretization and a planning-friendly zonotope uncertainty representation; the method also enables differentiating through a zonotope collision check, allowing one to integrate prediction and planning within a gradient-based optimization framework. Numerical examples show how ZAPP can produce safer trajectories compared to baselines in interactive scenes.