 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmbedding ISO 10218 Safety Compliance in Robots via Control Barrier Functions for Human-Robot Collaboration
Jun 11, 2026Human-Robot Collaboration (HRC) requires strict adherence to safety standards, such as ISO 10218, to prevent harmful interactions. Standard Speed and Separation Monitoring (SSM) filters calculate safe robotic speeds based on conservative assumptions, such as constant human velocity, which prevents accurate predictions of minimum separation distances and causes unnecessary operational halts. This paper proposes a Control Barrier Function (CBF) that explicitly incorporates human acceleration data to analytically forward-predict the minimum human-robot separation distance during a worst-case robotic stopping trajectory. To guarantee safety at the control level, this predictive CBF is integrated as an inequality constraint within a Sequential Quadratic Programming (SQP) framework. Specifically, two methods are proposed: Method I, a CBF-constrained PD safety filter; and Method II, a task-scaling SQP controller that enforces a spatial tube constraint. Simulated and real-world experiments on a UR10e robot evaluate the two proposed methods against a standard industrial SSM module baseline. Results demonstrate that Method II dynamically modulates execution speed and confines spatial deviations. Compared to Method I, Method II achieves a 63\% reduction in mean trajectory error and avoids excessive evasive manoeuvres, ensuring high task throughput while complying with ISO 10218 SSM guidelines.
Reactive and Safety-Aware Path Replanning for Collaborative Applications
Mar 10, 2025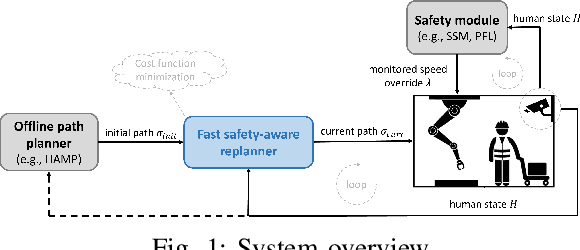

This paper addresses motion replanning in human-robot collaborative scenarios, emphasizing reactivity and safety-compliant efficiency. While existing human-aware motion planners are effective in structured environments, they often struggle with unpredictable human behavior, leading to safety measures that limit robot performance and throughput. In this study, we combine reactive path replanning and a safety-aware cost function, allowing the robot to adjust its path to changes in the human state. This solution reduces the execution time and the need for trajectory slowdowns without sacrificing safety. Simulations and real-world experiments show the method's effectiveness compared to standard human-robot cooperation approaches, with efficiency enhancements of up to 60\%.
Learning and planning for optimal synergistic human-robot coordination in manufacturing contexts
Mar 10, 2025Collaborative robotics cells leverage heterogeneous agents to provide agile production solutions. Effective coordination is essential to prevent inefficiencies and risks for human operators working alongside robots. This paper proposes a human-aware task allocation and scheduling model based on Mixed Integer Nonlinear Programming to optimize efficiency and safety starting from task planning stages. The approach exploits synergies that encode the coupling effects between pairs of tasks executed in parallel by the agents, arising from the safety constraints imposed on robot agents. These terms are learned from previous executions using a Bayesian estimation; the inference of the posterior probability distribution of the synergy coefficients is performed using the Markov Chain Monte Carlo method. The synergy enhances task planning by adapting the nominal duration of the plan according to the effect of the operator's presence. Simulations and experimental results demonstrate that the proposed method produces improved human-aware task plans, reducing unuseful interference between agents, increasing human-robot distance, and achieving up to an 18\% reduction in process execution time.
OpenMORE: an open-source tool for sampling-based path replanning in ROS
Nov 30, 2023With the spread of robots in unstructured, dynamic environments, the topic of path replanning has gained importance in the robotics community. Although the number of replanning strategies has significantly increased, there is a lack of agreed-upon libraries and tools, making the use, development, and benchmarking of new algorithms arduous. This paper introduces OpenMORE, a new open-source ROS-based C++ library for sampling-based path replanning algorithms. The library builds a framework that allows for continuous replanning and collision checking of the traversed path during the execution of the robot trajectory. Users can solve replanning tasks exploiting the already available algorithms and can easily integrate new ones, leveraging the library to manage the entire execution.
* Accepted at IEEE ETFA 2023
Predicting human motion intention for pHRI assistive control
Jul 20, 2023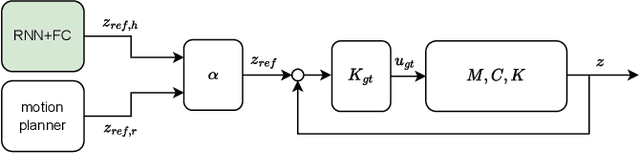


This work addresses human intention identification during physical Human-Robot Interaction (pHRI) tasks to include this information in an assistive controller. To this purpose, human intention is defined as the desired trajectory that the human wants to follow over a finite rolling prediction horizon so that the robot can assist in pursuing it. This work investigates a Recurrent Neural Network (RNN), specifically, Long-Short Term Memory (LSTM) cascaded with a Fully Connected layer. In particular, we propose an iterative training procedure to adapt the model. Such an iterative procedure is powerful in reducing the prediction error. Still, it has the drawback that it is time-consuming and does not generalize to different users or different co-manipulated objects. To overcome this issue, Transfer Learning (TL) adapts the pre-trained model to new trajectories, users, and co-manipulated objects by freezing the LSTM layer and fine-tuning the last FC layer, which makes the procedure faster. Experiments show that the iterative procedure adapts the model and reduces prediction error. Experiments also show that TL adapts to different users and to the co-manipulation of a large object. Finally, to check the utility of adopting the proposed method, we compare the proposed controller enhanced by the intention prediction with the other two standard controllers of pHRI.
Modeling and analysis of pHRI with Differential Game Theory
Jul 20, 2023
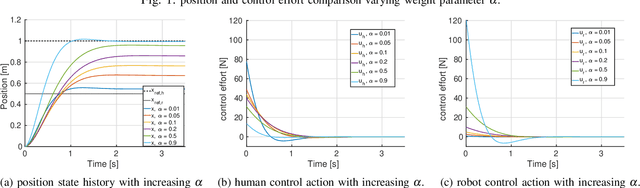


Applications involving humans and robots working together are spreading nowadays. Alongside, modeling and control techniques that allow physical Human-Robot Interaction (pHRI) are widely investigated. To better understand its potential application in pHRI, this work investigates the Cooperative Differential Game Theory modeling of pHRI in a cooperative reaching task, specifically for reference tracking. The proposed controller based on Collaborative Game Theory is deeply analyzed and compared in simulations with two other techniques, Linear Quadratic Regulator (LQR) and Non-Cooperative Game-Theoretic Controller. The set of simulations shows how different tuning of control parameters affects the system response and control efforts of both the players for the three controllers, suggesting the use of Cooperative GT in the case the robot should assist the human, while Non-Cooperative GT represents a better choice in the case the robot should lead the action. Finally, preliminary tests with a trained human are performed to extract useful information on the real applicability and limitations of the proposed method.
Spatio-Temporal Avoidance of Predicted Occupancy in Human-Robot Collaboration
Jul 08, 2023



This paper addresses human-robot collaboration (HRC) challenges of integrating predictions of human activity to provide a proactive-n-reactive response capability for the robot. Prior works that consider current or predicted human poses as static obstacles are too nearsighted or too conservative in planning, potentially causing delayed robot paths. Alternatively, time-varying prediction of human poses would enable robot paths that avoid anticipated human poses, synchronized dynamically in time and space. Herein, a proactive path planning method, denoted STAP, is presented that uses spatiotemporal human occupancy maps to find robot trajectories that anticipate human movements, allowing robot passage without stopping. In addition, STAP anticipates delays from robot speed restrictions required by ISO/TS 15066 speed and separation monitoring (SSM). STAP also proposes a sampling-based planning algorithm based on RRT* to solve the spatio-temporal motion planning problem and find paths of minimum expected duration. Experimental results show STAP generates paths of shorter duration and greater average robot-human separation distance throughout tasks. Additionally, STAP more accurately estimates robot trajectory durations in HRC, which are useful in arriving at proactive-n-reactive robot sequencing.
* 7 pages, 7 figures. Accepted at IEEE ROMAN 2023
Optimal task and motion planning and execution for human-robot multi-agent systems in dynamic environments
Mar 27, 2023Combining symbolic and geometric reasoning in multi-agent systems is a challenging task that involves planning, scheduling, and synchronization problems. Existing works overlooked the variability of task duration and geometric feasibility that is intrinsic to these systems because of the interaction between agents and the environment. We propose a combined task and motion planning approach to optimize sequencing, assignment, and execution of tasks under temporal and spatial variability. The framework relies on decoupling tasks and actions, where an action is one possible geometric realization of a symbolic task. At the task level, timeline-based planning deals with temporal constraints, duration variability, and synergic assignment of tasks. At the action level, online motion planning plans for the actual movements dealing with environmental changes. We demonstrate the approach effectiveness in a collaborative manufacturing scenario, in which a robotic arm and a human worker shall assemble a mosaic in the shortest time possible. Compared with existing works, our approach applies to a broader range of applications and reduces the execution time of the process.
Hiding task-oriented programming complexity: an industrial case study
Mar 04, 2023The ease of use of robot programming interfaces represents a barrier to robot adoption in several manufacturing sectors because of the need for more expertise from the end-users. Current robot programming methods are mostly the past heritage, with robot programmers reluctant to adopt new programming paradigms. This work aims to evaluate the impact on non-expert users of introducing a new task-oriented programming interface that hides the complexity of a programming framework based on ROS. The paper compares the programming performance of such an interface with a classic robot-oriented programming method based on a state-of-the-art robot teach pendant. An experimental campaign involved 22 non-expert users working on the programming of two industrial tasks. Task-oriented and robot-oriented programming showed comparable learning time, programming time and the number of questions raised during the programming phases, highlighting the possibility of a smooth introduction to task-oriented programming even to non-expert users.
Co-manipulation of soft-materials estimating deformation from depth images
Jan 13, 2023Human-robot co-manipulation of soft materials, such as fabrics, composites, and sheets of paper/cardboard, is a challenging operation that presents several relevant industrial applications. Estimating the deformation state of the co-manipulated material is one of the main challenges. Viable methods provide the indirect measure by calculating the human-robot relative distance. In this paper, we develop a data-driven model to estimate the deformation state of the material from a depth image through a Convolutional Neural Network (CNN). First, we define the deformation state of the material as the relative roto-translation from the current robot pose and a human grasping position. The model estimates the current deformation state through a Convolutional Neural Network, specifically a DenseNet-121 pretrained on ImageNet.The delta between the current and the desired deformation state is fed to the robot controller that outputs twist commands. The paper describes the developed approach to acquire, preprocess the dataset and train the model. The model is compared with the current state-of-the-art method based on a skeletal tracker from cameras. Results show that our approach achieves better performances and avoids the various drawbacks caused by using a skeletal tracker.Finally, we also studied the model performance according to different architectures and dataset dimensions to minimize the time required for dataset acquisition