Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAccelerating sampling-based optimal path planning via adaptive informed sampling
Paper and Code
Aug 19, 2022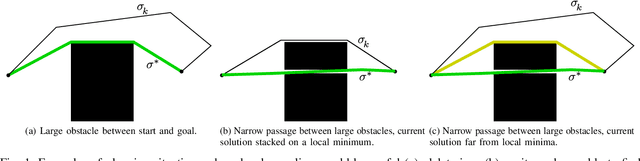
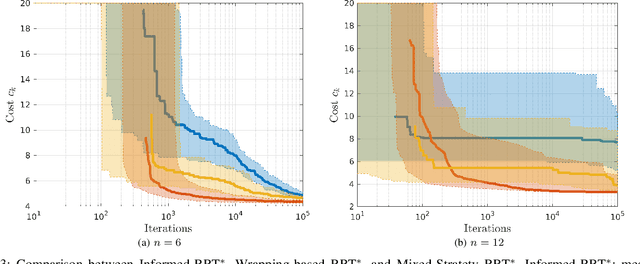
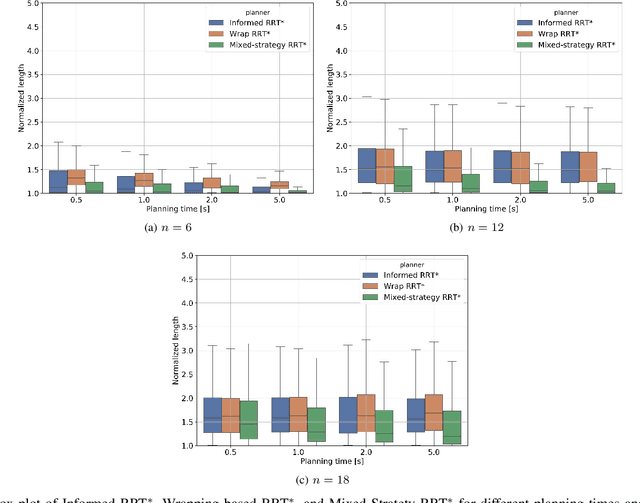
This paper improves the performance of RRT*-like sampling-based path planners by combining admissible informed sampling and local sampling (i.e., sampling the neighborhood of the current solution). An adaptive strategy that accounts for the cost progression regulates the trade-off between exploration (admissible informed sampling) and exploitation (local sampling). The paper proves that the resulting algorithm is asymptotically optimal. Furthermore, its convergence rate is superior to that of state-of-the-art path planners, such as Informed-RRT*, both in simulations and manufacturing case studies. An open-source ROS-compatible implementation is also released.
* Preprint of manuscript submitted to Springer Nature, Aug 2022 11
pages, 9 figures
View paper on