 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReactive and Safety-Aware Path Replanning for Collaborative Applications
Mar 10, 2025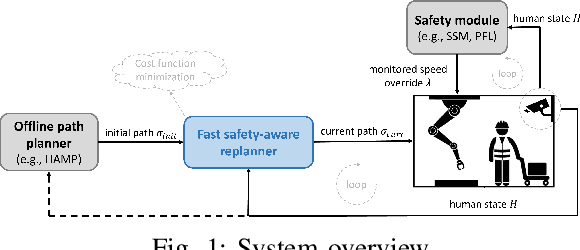
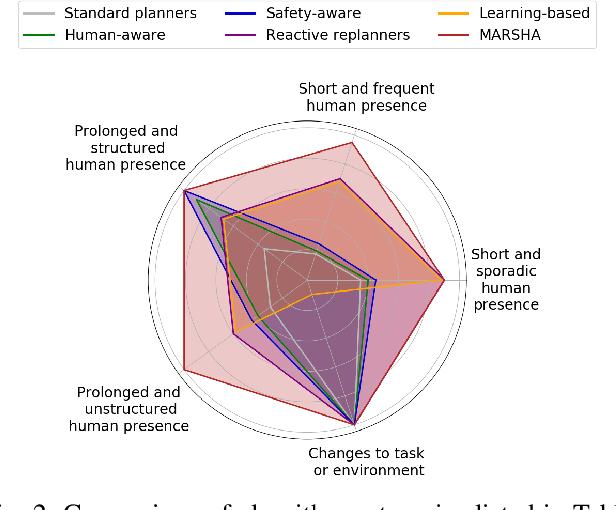
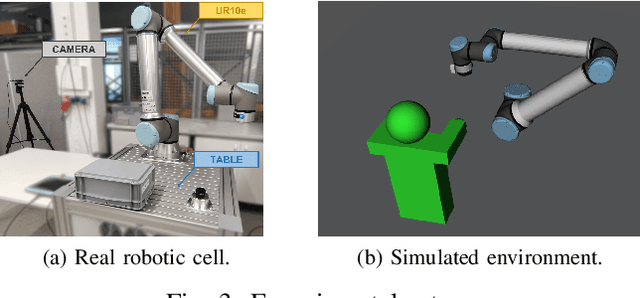

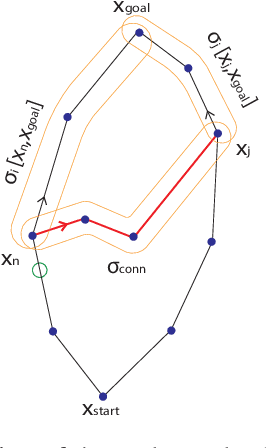
This paper addresses motion replanning in human-robot collaborative scenarios, emphasizing reactivity and safety-compliant efficiency. While existing human-aware motion planners are effective in structured environments, they often struggle with unpredictable human behavior, leading to safety measures that limit robot performance and throughput. In this study, we combine reactive path replanning and a safety-aware cost function, allowing the robot to adjust its path to changes in the human state. This solution reduces the execution time and the need for trajectory slowdowns without sacrificing safety. Simulations and real-world experiments show the method's effectiveness compared to standard human-robot cooperation approaches, with efficiency enhancements of up to 60\%.
OpenMORE: an open-source tool for sampling-based path replanning in ROS
Nov 30, 2023With the spread of robots in unstructured, dynamic environments, the topic of path replanning has gained importance in the robotics community. Although the number of replanning strategies has significantly increased, there is a lack of agreed-upon libraries and tools, making the use, development, and benchmarking of new algorithms arduous. This paper introduces OpenMORE, a new open-source ROS-based C++ library for sampling-based path replanning algorithms. The library builds a framework that allows for continuous replanning and collision checking of the traversed path during the execution of the robot trajectory. Users can solve replanning tasks exploiting the already available algorithms and can easily integrate new ones, leveraging the library to manage the entire execution.
* Accepted at IEEE ETFA 2023
Modeling and analysis of pHRI with Differential Game Theory
Jul 20, 2023
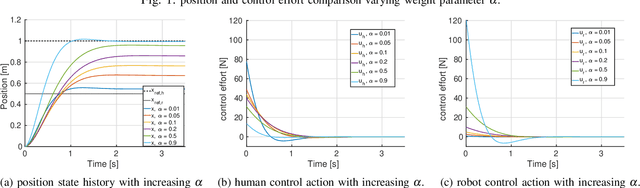


Applications involving humans and robots working together are spreading nowadays. Alongside, modeling and control techniques that allow physical Human-Robot Interaction (pHRI) are widely investigated. To better understand its potential application in pHRI, this work investigates the Cooperative Differential Game Theory modeling of pHRI in a cooperative reaching task, specifically for reference tracking. The proposed controller based on Collaborative Game Theory is deeply analyzed and compared in simulations with two other techniques, Linear Quadratic Regulator (LQR) and Non-Cooperative Game-Theoretic Controller. The set of simulations shows how different tuning of control parameters affects the system response and control efforts of both the players for the three controllers, suggesting the use of Cooperative GT in the case the robot should assist the human, while Non-Cooperative GT represents a better choice in the case the robot should lead the action. Finally, preliminary tests with a trained human are performed to extract useful information on the real applicability and limitations of the proposed method.
Predicting human motion intention for pHRI assistive control
Jul 20, 2023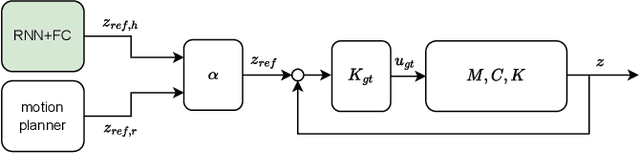
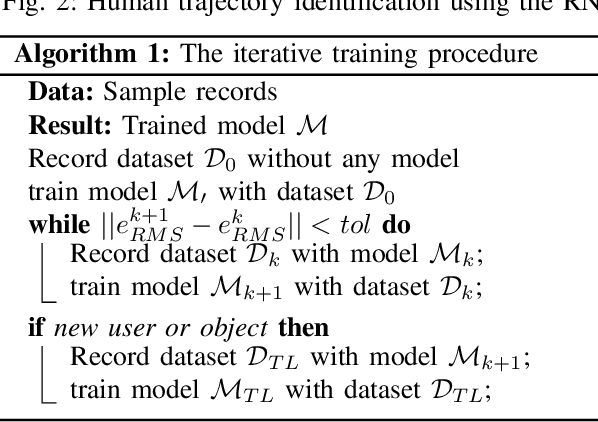


This work addresses human intention identification during physical Human-Robot Interaction (pHRI) tasks to include this information in an assistive controller. To this purpose, human intention is defined as the desired trajectory that the human wants to follow over a finite rolling prediction horizon so that the robot can assist in pursuing it. This work investigates a Recurrent Neural Network (RNN), specifically, Long-Short Term Memory (LSTM) cascaded with a Fully Connected layer. In particular, we propose an iterative training procedure to adapt the model. Such an iterative procedure is powerful in reducing the prediction error. Still, it has the drawback that it is time-consuming and does not generalize to different users or different co-manipulated objects. To overcome this issue, Transfer Learning (TL) adapts the pre-trained model to new trajectories, users, and co-manipulated objects by freezing the LSTM layer and fine-tuning the last FC layer, which makes the procedure faster. Experiments show that the iterative procedure adapts the model and reduces prediction error. Experiments also show that TL adapts to different users and to the co-manipulation of a large object. Finally, to check the utility of adopting the proposed method, we compare the proposed controller enhanced by the intention prediction with the other two standard controllers of pHRI.
Optimal task and motion planning and execution for human-robot multi-agent systems in dynamic environments
Mar 27, 2023Combining symbolic and geometric reasoning in multi-agent systems is a challenging task that involves planning, scheduling, and synchronization problems. Existing works overlooked the variability of task duration and geometric feasibility that is intrinsic to these systems because of the interaction between agents and the environment. We propose a combined task and motion planning approach to optimize sequencing, assignment, and execution of tasks under temporal and spatial variability. The framework relies on decoupling tasks and actions, where an action is one possible geometric realization of a symbolic task. At the task level, timeline-based planning deals with temporal constraints, duration variability, and synergic assignment of tasks. At the action level, online motion planning plans for the actual movements dealing with environmental changes. We demonstrate the approach effectiveness in a collaborative manufacturing scenario, in which a robotic arm and a human worker shall assemble a mosaic in the shortest time possible. Compared with existing works, our approach applies to a broader range of applications and reduces the execution time of the process.
Hiding task-oriented programming complexity: an industrial case study
Mar 04, 2023The ease of use of robot programming interfaces represents a barrier to robot adoption in several manufacturing sectors because of the need for more expertise from the end-users. Current robot programming methods are mostly the past heritage, with robot programmers reluctant to adopt new programming paradigms. This work aims to evaluate the impact on non-expert users of introducing a new task-oriented programming interface that hides the complexity of a programming framework based on ROS. The paper compares the programming performance of such an interface with a classic robot-oriented programming method based on a state-of-the-art robot teach pendant. An experimental campaign involved 22 non-expert users working on the programming of two industrial tasks. Task-oriented and robot-oriented programming showed comparable learning time, programming time and the number of questions raised during the programming phases, highlighting the possibility of a smooth introduction to task-oriented programming even to non-expert users.
Accelerating sampling-based optimal path planning via adaptive informed sampling
Aug 19, 2022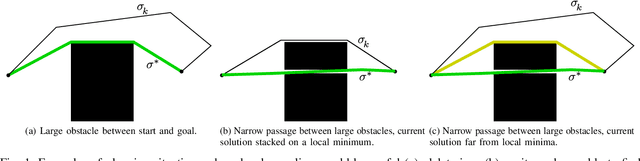
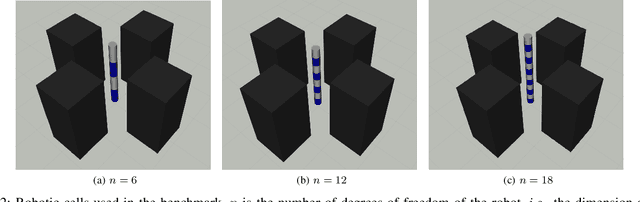
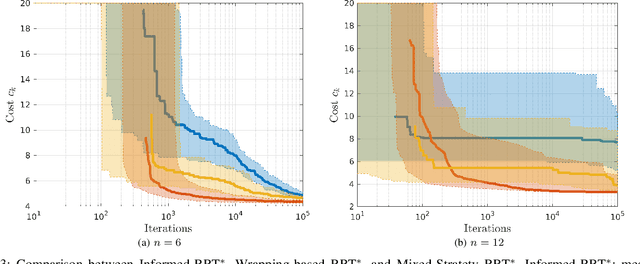
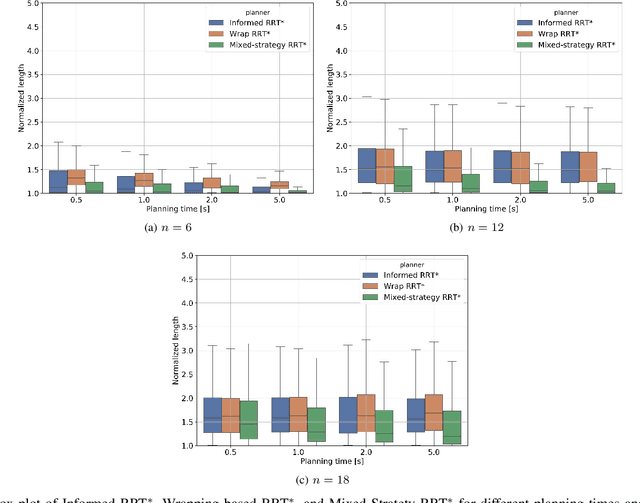
This paper improves the performance of RRT*-like sampling-based path planners by combining admissible informed sampling and local sampling (i.e., sampling the neighborhood of the current solution). An adaptive strategy that accounts for the cost progression regulates the trade-off between exploration (admissible informed sampling) and exploitation (local sampling). The paper proves that the resulting algorithm is asymptotically optimal. Furthermore, its convergence rate is superior to that of state-of-the-art path planners, such as Informed-RRT*, both in simulations and manufacturing case studies. An open-source ROS-compatible implementation is also released.
A Multisensory Edge-Cloud Platform for Opportunistic Radio Sensing in Cobot Environments
Mar 26, 2021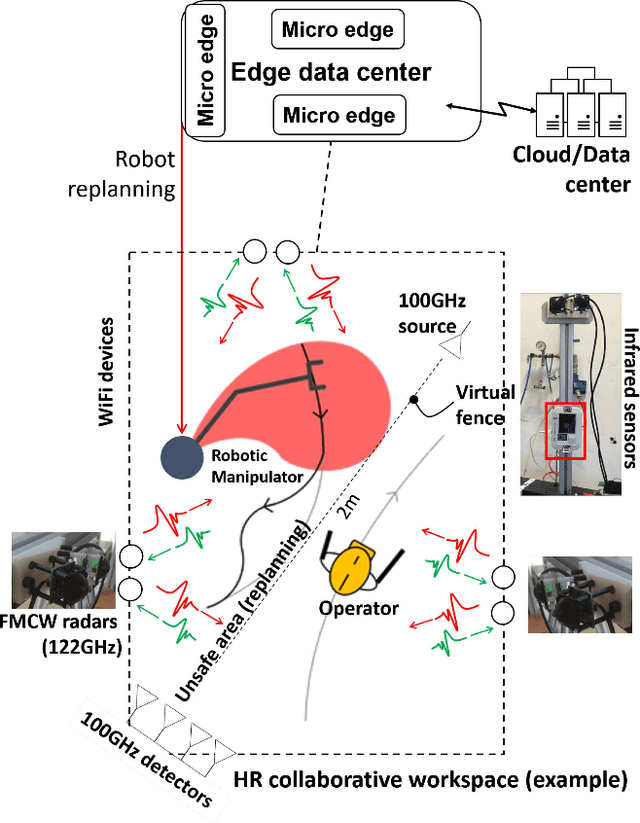

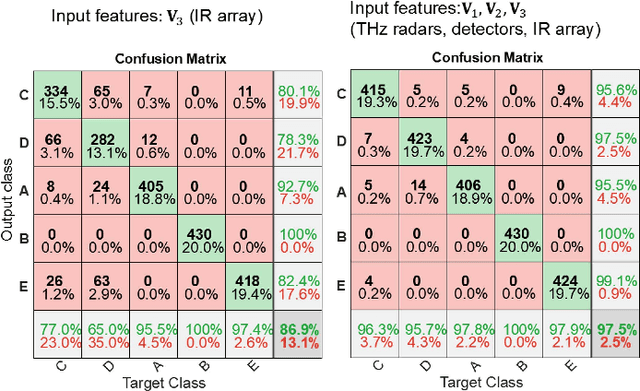
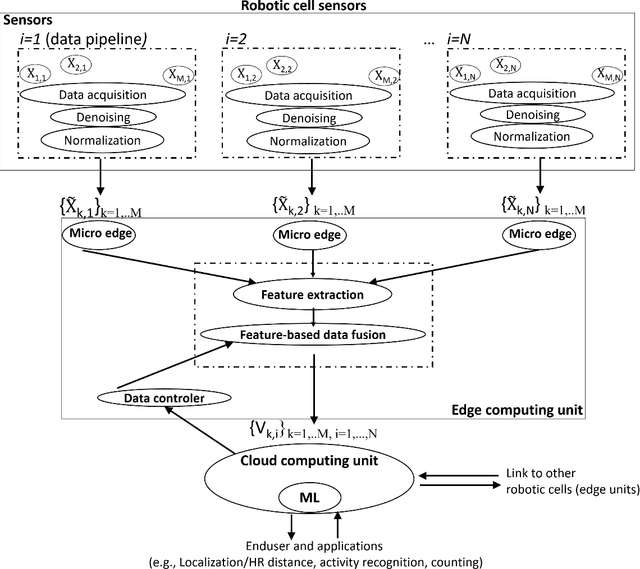
Worker monitoring and protection in collaborative robot (cobots) industrial environments requires advanced sensing capabilities and flexible solutions to monitor the movements of the operator in close proximity of moving robots. Collaborative robotics is an active research area where Internet of Things (IoT) and novel sensing technologies are expected to play a critical role. Considering that no single technology can currently solve the problem of continuous worker monitoring, the paper targets the development of an IoT multisensor data fusion (MDF) platform. It is based on an edge-cloud architecture that supports the combination and transformation of multiple sensing technologies to enable the passive and anonymous detection of workers. Multidimensional data acquisition from different IoT sources, signal pre-processing, feature extraction, data distribution and fusion, along with machine learning (ML) and computing methods are described. The proposed IoT platform also comprises a practical solution for data fusion and analytics. It is able to perform opportunistic and real-time perception of workers by fusing and analyzing radio signals obtained from several interconnected IoT components, namely a multi-antenna WiFi installation (2.4-5 GHz), a sub-THz imaging camera (100 GHz), a network of radars (122 GHz) and infrared sensors (8-13 {\mu}m). The performance of the proposed IoT platform is validated through real use case scenarios inside a pilot industrial plant in which protective human--robot distance must be guaranteed considering latency and detection uncertainties.
Anytime informed path re-planning and optimization for robots in changing environments
Mar 24, 2021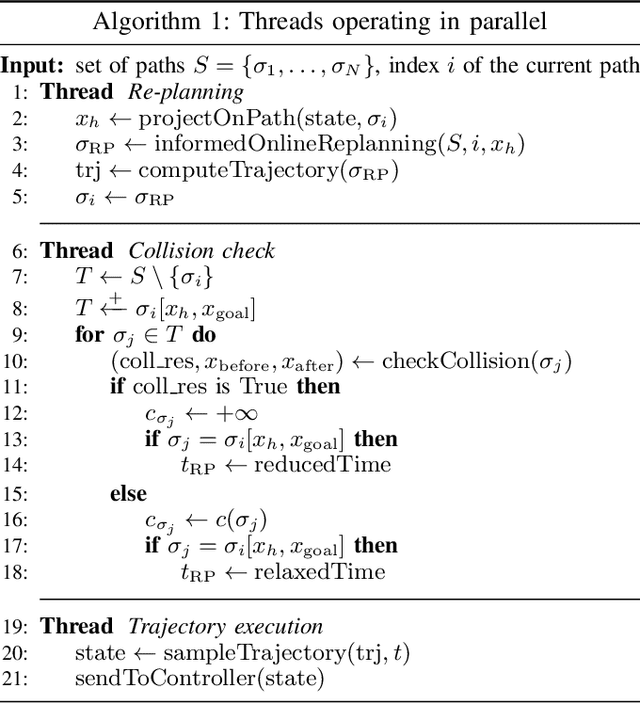
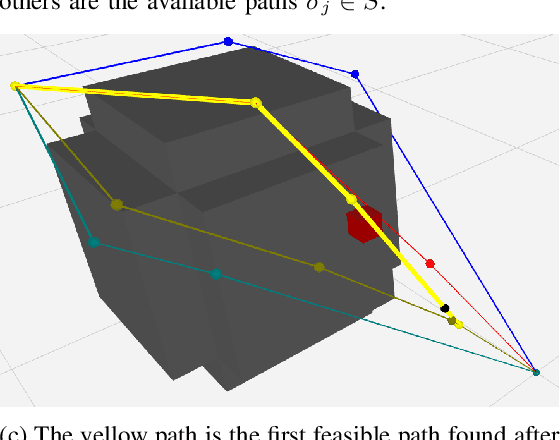

In this paper, we propose a path re-planning algorithm that makes robots able to work in scenarios with moving obstacles. The algorithm switches between a set of pre-computed paths to avoid collisions with moving obstacles. It also improves the current path in an anytime fashion. The use of informed sampling enhances the search speed. Numerical results show the effectiveness of the strategy in different simulation scenarios.