Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnytime informed path re-planning and optimization for robots in changing environments
Paper and Code
Mar 24, 2021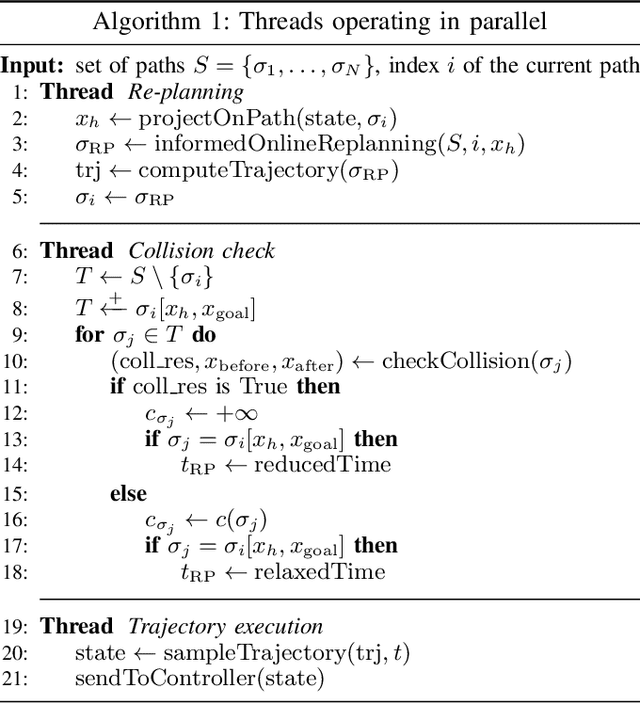
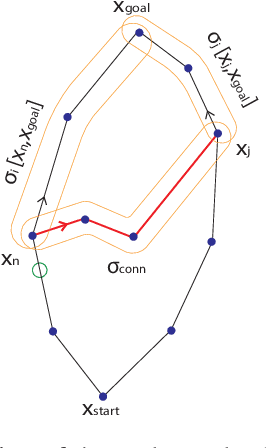
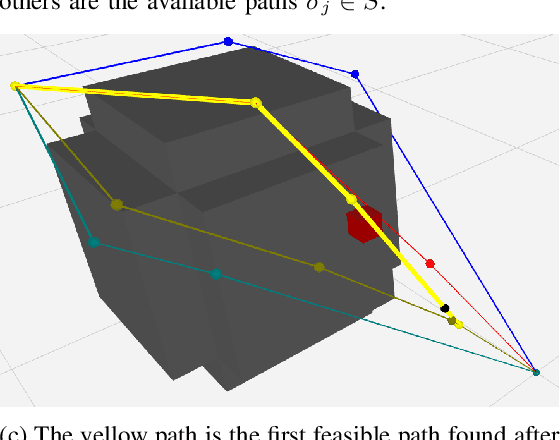

In this paper, we propose a path re-planning algorithm that makes robots able to work in scenarios with moving obstacles. The algorithm switches between a set of pre-computed paths to avoid collisions with moving obstacles. It also improves the current path in an anytime fashion. The use of informed sampling enhances the search speed. Numerical results show the effectiveness of the strategy in different simulation scenarios.
* Submitted to IROS 2021. "This work has been submitted to the IEEE for
possible publication. Copyright may be transferred without notice, after
which this version may no longer be accessible"
View paper on