 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReactive and Safety-Aware Path Replanning for Collaborative Applications
Mar 10, 2025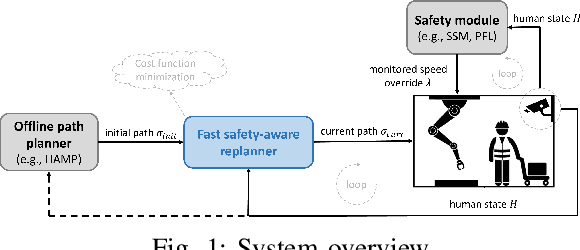
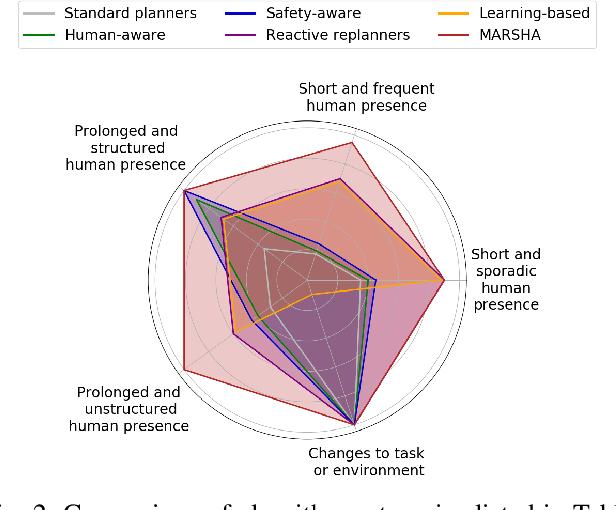
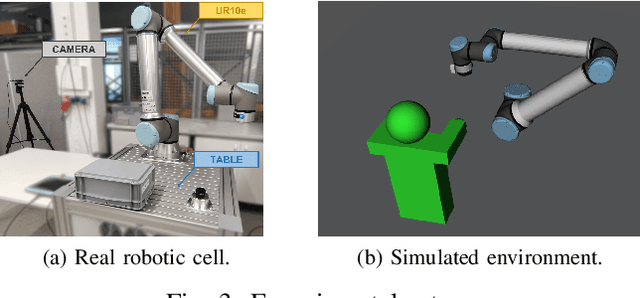

This paper addresses motion replanning in human-robot collaborative scenarios, emphasizing reactivity and safety-compliant efficiency. While existing human-aware motion planners are effective in structured environments, they often struggle with unpredictable human behavior, leading to safety measures that limit robot performance and throughput. In this study, we combine reactive path replanning and a safety-aware cost function, allowing the robot to adjust its path to changes in the human state. This solution reduces the execution time and the need for trajectory slowdowns without sacrificing safety. Simulations and real-world experiments show the method's effectiveness compared to standard human-robot cooperation approaches, with efficiency enhancements of up to 60\%.
OpenMORE: an open-source tool for sampling-based path replanning in ROS
Nov 30, 2023With the spread of robots in unstructured, dynamic environments, the topic of path replanning has gained importance in the robotics community. Although the number of replanning strategies has significantly increased, there is a lack of agreed-upon libraries and tools, making the use, development, and benchmarking of new algorithms arduous. This paper introduces OpenMORE, a new open-source ROS-based C++ library for sampling-based path replanning algorithms. The library builds a framework that allows for continuous replanning and collision checking of the traversed path during the execution of the robot trajectory. Users can solve replanning tasks exploiting the already available algorithms and can easily integrate new ones, leveraging the library to manage the entire execution.
* Accepted at IEEE ETFA 2023
Anytime informed path re-planning and optimization for robots in changing environments
Mar 24, 2021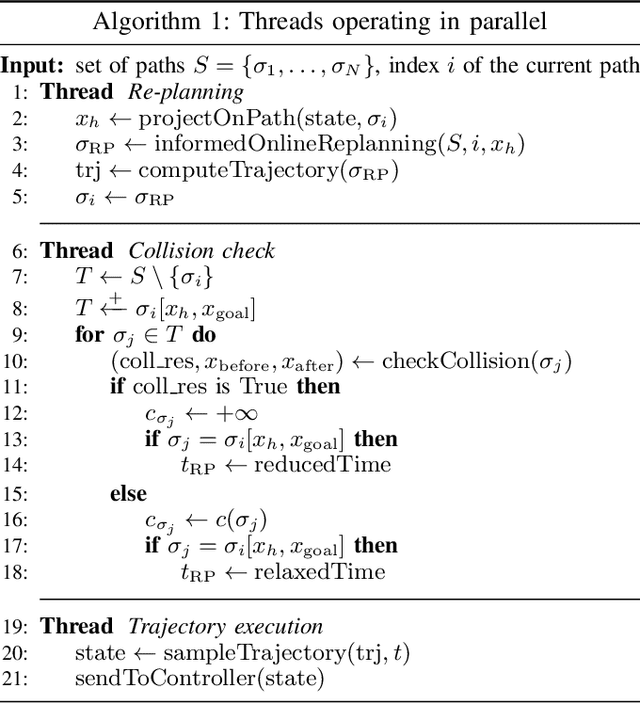
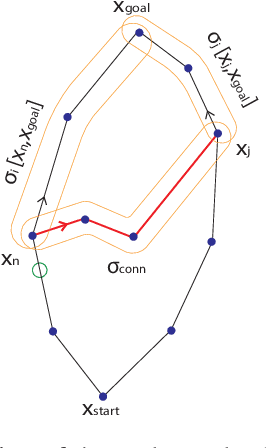
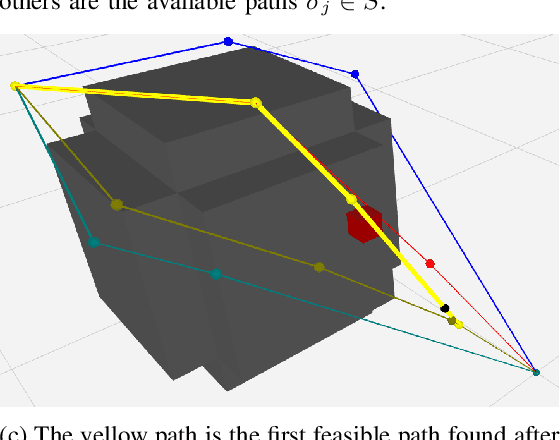

In this paper, we propose a path re-planning algorithm that makes robots able to work in scenarios with moving obstacles. The algorithm switches between a set of pre-computed paths to avoid collisions with moving obstacles. It also improves the current path in an anytime fashion. The use of informed sampling enhances the search speed. Numerical results show the effectiveness of the strategy in different simulation scenarios.