 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Using Neural Networks to Learn Safety Speed Reduction in Human-Robot Collaboration: A Comparative Analysis
Dec 19, 2025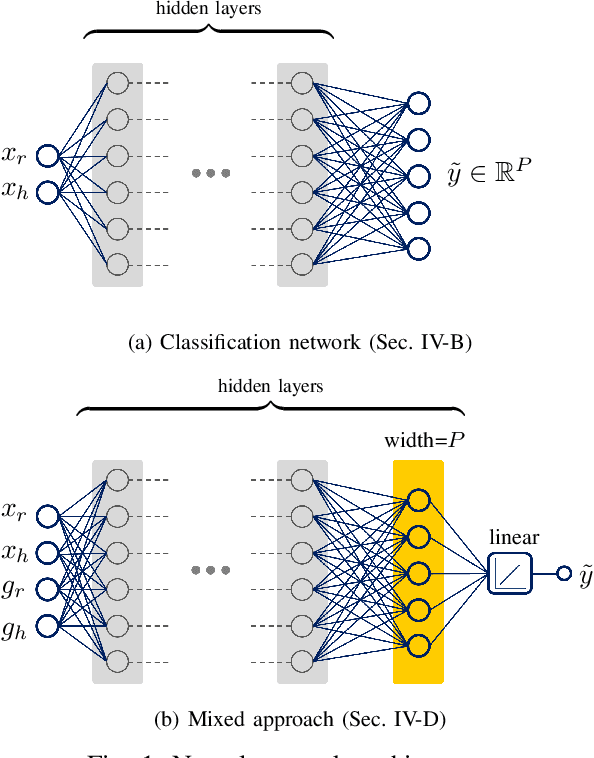
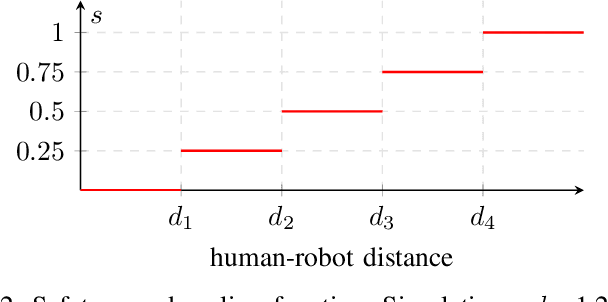
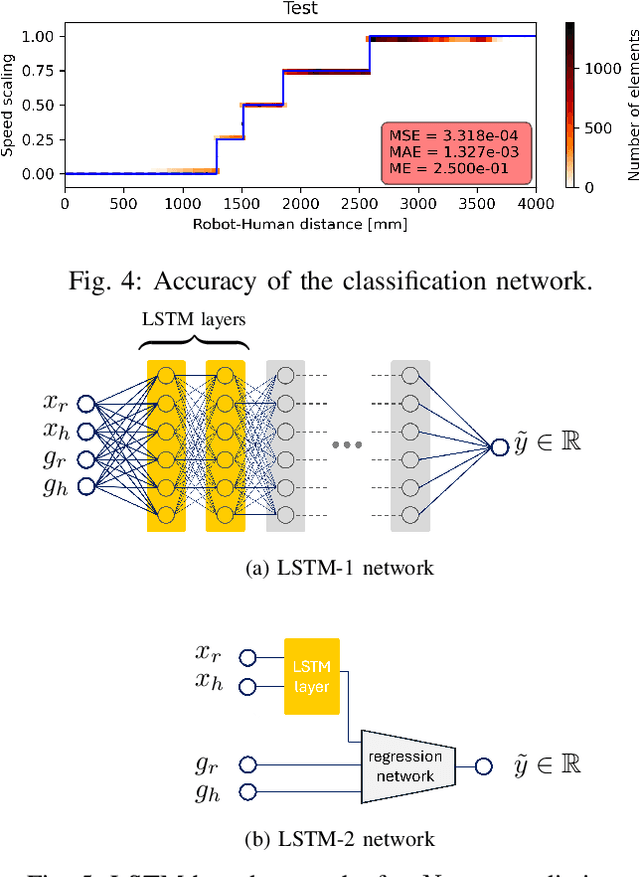
In Human-Robot Collaboration, safety mechanisms such as Speed and Separation Monitoring and Power and Force Limitation dynamically adjust the robot's speed based on human proximity. While essential for risk reduction, these mechanisms introduce slowdowns that makes cycle time estimation a hard task and impact job scheduling efficiency. Existing methods for estimating cycle times or designing schedulers often rely on predefined safety models, which may not accurately reflect real-world safety implementations, as these depend on case-specific risk assessments. In this paper, we propose a deep learning approach to predict the robot's safety scaling factor directly from process execution data. We analyze multiple neural network architectures and demonstrate that a simple feed-forward network effectively estimates the robot's slowdown. This capability is crucial for improving cycle time predictions and designing more effective scheduling algorithms in collaborative robotic environments.
Optimized Scheduling and Positioning of Mobile Manipulators in Collaborative Applications
Dec 19, 2025The growing integration of mobile robots in shared workspaces requires efficient path planning and coordination between the agents, accounting for safety and productivity. In this work, we propose a digital model-based optimization framework for mobile manipulators in human-robot collaborative environments, in order to determine the sequence of robot base poses and the task scheduling for the robot. The complete problem is treated as black-box, and Particle Swarm Optimization (PSO) is employed to balance conflicting Key-Performance Indicators (KPIs). We demonstrate improvements in cycle time, task sequencing, and adaptation to human presence in a collaborative box-packing scenario.
Uncertainty-aware Planning with Inaccurate Models for Robotized Liquid Handling
Jul 28, 2025Physics-based simulations and learning-based models are vital for complex robotics tasks like deformable object manipulation and liquid handling. However, these models often struggle with accuracy due to epistemic uncertainty or the sim-to-real gap. For instance, accurately pouring liquid from one container to another poses challenges, particularly when models are trained on limited demonstrations and may perform poorly in novel situations. This paper proposes an uncertainty-aware Monte Carlo Tree Search (MCTS) algorithm designed to mitigate these inaccuracies. By incorporating estimates of model uncertainty, the proposed MCTS strategy biases the search towards actions with lower predicted uncertainty. This approach enhances the reliability of planning under uncertain conditions. Applied to a liquid pouring task, our method demonstrates improved success rates even with models trained on minimal data, outperforming traditional methods and showcasing its potential for robust decision-making in robotics.
ros2 fanuc interface: Design and Evaluation of a Fanuc CRX Hardware Interface in ROS2
Jun 17, 2025This paper introduces the ROS2 control and the Hardware Interface (HW) integration for the Fanuc CRX- robot family. It explains basic implementation details and communication protocols, and its integration with the Moveit2 motion planning library. We conducted a series of experiments to evaluate relevant performances in the robotics field. We tested the developed ros2_fanuc_interface for four relevant robotics cases: step response, trajectory tracking, collision avoidance integrated with Moveit2, and dynamic velocity scaling, respectively. Results show that, despite a non-negligible delay between command and feedback, the robot can track the defined path with negligible errors (if it complies with joint velocity limits), ensuring collision avoidance. Full code is open source and available at https://github.com/paolofrance/ros2_fanuc_interface.
Automating Box Folding: Sequence Extraction and Ranking Methodologies
May 07, 2025Box folding represents a crucial challenge for automated packaging systems. This work bridges the gap between existing methods for folding sequence extraction and approaches focused on the adaptability of automated systems to specific box types. An innovative method is proposed to identify and rank folding sequences, enabling the transformation of a box from an initial state to a desired final configuration. The system evaluates and ranks these sequences based on their feasibility and compatibility with available hardware, providing recommendations for real-world implementations. Finally, an illustrative use case is presented, where a robot performs the folding of a box.
Low Resolution Next Best View for Robot Packing
May 07, 2025Automating the packing of objects with robots is a key challenge in industrial automation, where efficient object perception plays a fundamental role. This paper focuses on scenarios where precise 3D reconstruction is not required, prioritizing cost-effective and scalable solutions. The proposed Low-Resolution Next Best View (LR-NBV) algorithm leverages a utility function that balances pose redundancy and acquisition density, ensuring efficient object reconstruction. Experimental validation demonstrates that LR-NBV consistently outperforms standard NBV approaches, achieving comparable accuracy with significantly fewer poses. This method proves highly suitable for applications requiring efficiency, scalability, and adaptability without relying on high-precision sensing.
Learning and planning for optimal synergistic human-robot coordination in manufacturing contexts
Mar 10, 2025Collaborative robotics cells leverage heterogeneous agents to provide agile production solutions. Effective coordination is essential to prevent inefficiencies and risks for human operators working alongside robots. This paper proposes a human-aware task allocation and scheduling model based on Mixed Integer Nonlinear Programming to optimize efficiency and safety starting from task planning stages. The approach exploits synergies that encode the coupling effects between pairs of tasks executed in parallel by the agents, arising from the safety constraints imposed on robot agents. These terms are learned from previous executions using a Bayesian estimation; the inference of the posterior probability distribution of the synergy coefficients is performed using the Markov Chain Monte Carlo method. The synergy enhances task planning by adapting the nominal duration of the plan according to the effect of the operator's presence. Simulations and experimental results demonstrate that the proposed method produces improved human-aware task plans, reducing unuseful interference between agents, increasing human-robot distance, and achieving up to an 18\% reduction in process execution time.
Reactive and Safety-Aware Path Replanning for Collaborative Applications
Mar 10, 2025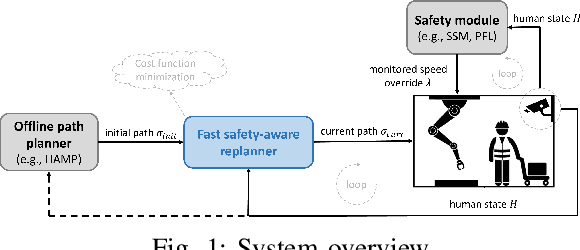
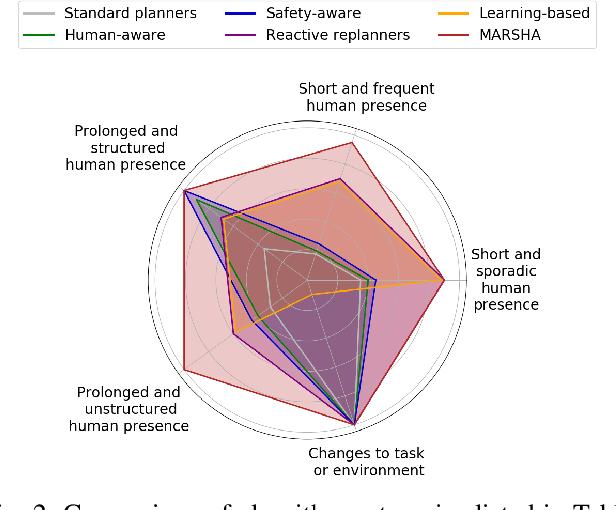
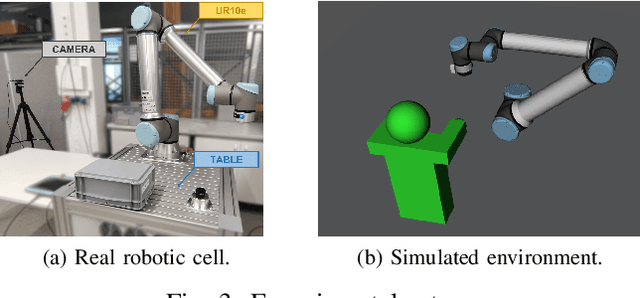

This paper addresses motion replanning in human-robot collaborative scenarios, emphasizing reactivity and safety-compliant efficiency. While existing human-aware motion planners are effective in structured environments, they often struggle with unpredictable human behavior, leading to safety measures that limit robot performance and throughput. In this study, we combine reactive path replanning and a safety-aware cost function, allowing the robot to adjust its path to changes in the human state. This solution reduces the execution time and the need for trajectory slowdowns without sacrificing safety. Simulations and real-world experiments show the method's effectiveness compared to standard human-robot cooperation approaches, with efficiency enhancements of up to 60\%.
Digital Model-Driven Genetic Algorithm for Optimizing Layout and Task Allocation in Human-Robot Collaborative Assemblies
Mar 04, 2025



This paper addresses the optimization of human-robot collaborative work-cells before their physical deployment. Most of the times, such environments are designed based on the experience of the system integrators, often leading to sub-optimal solutions. Accurate simulators of the robotic cell, accounting for the presence of the human as well, are available today and can be used in the pre-deployment. We propose an iterative optimization scheme where a digital model of the work-cell is updated based on a genetic algorithm. The methodology focuses on the layout optimization and task allocation, encoding both the problems simultaneously in the design variables handled by the genetic algorithm, while the task scheduling problem depends on the result of the upper-level one. The final solution balances conflicting objectives in the fitness function and is validated to show the impact of the objectives with respect to a baseline, which represents possible initial choices selected based on the human judgment.
Optimizing Collaborative Robotics since Pre-Deployment via Cyber-Physical Systems' Digital Twins
Oct 18, 2024



The collaboration between humans and robots re-quires a paradigm shift not only in robot perception, reasoning, and action, but also in the design of the robotic cell. This paper proposes an optimization framework for designing collaborative robotics cells using a digital twin during the pre-deployment phase. This approach mitigates the limitations of experience-based sub-optimal designs by means of Bayesian optimization to find the optimal layout after a certain number of iterations. By integrating production KPIs into a black-box optimization frame-work, the digital twin supports data-driven decision-making, reduces the need for costly prototypes, and ensures continuous improvement thanks to the learning nature of the algorithm. The paper presents a case study with preliminary results that show how this methodology can be applied to obtain safer, more efficient, and adaptable human-robot collaborative environments.