 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReactive and Safety-Aware Path Replanning for Collaborative Applications
Mar 10, 2025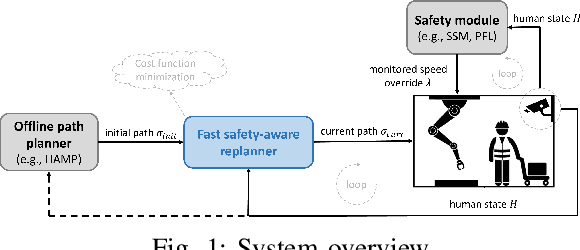
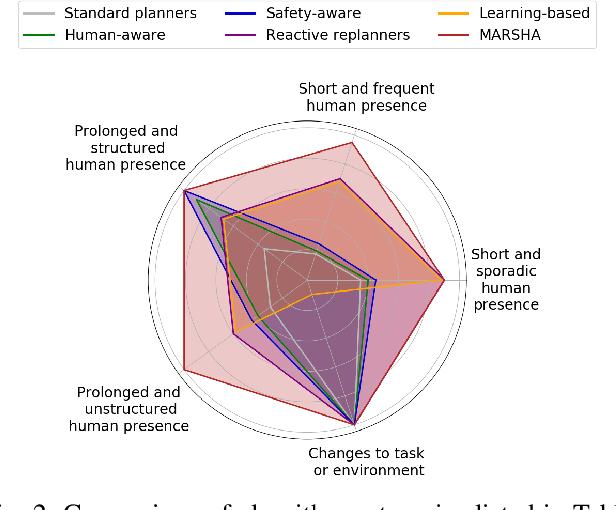
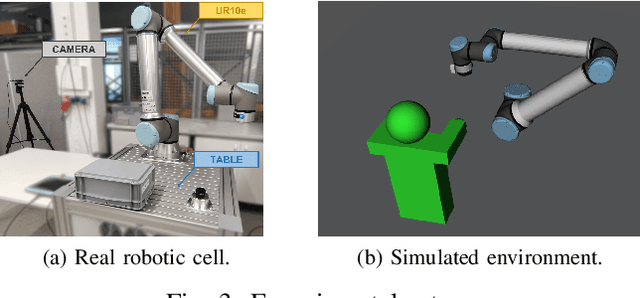

This paper addresses motion replanning in human-robot collaborative scenarios, emphasizing reactivity and safety-compliant efficiency. While existing human-aware motion planners are effective in structured environments, they often struggle with unpredictable human behavior, leading to safety measures that limit robot performance and throughput. In this study, we combine reactive path replanning and a safety-aware cost function, allowing the robot to adjust its path to changes in the human state. This solution reduces the execution time and the need for trajectory slowdowns without sacrificing safety. Simulations and real-world experiments show the method's effectiveness compared to standard human-robot cooperation approaches, with efficiency enhancements of up to 60\%.
Optimally Controlling the Timing of Energy Transfer in Elastic Joints: Experimental Validation of the Bi-Stiffness Actuation Concept
Sep 14, 2023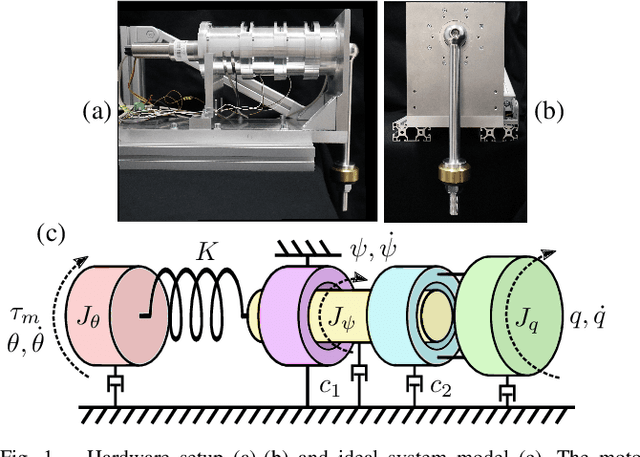
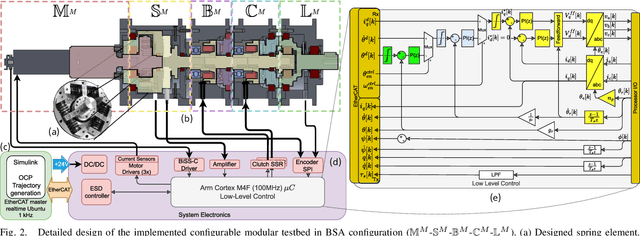
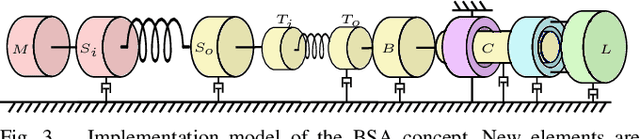
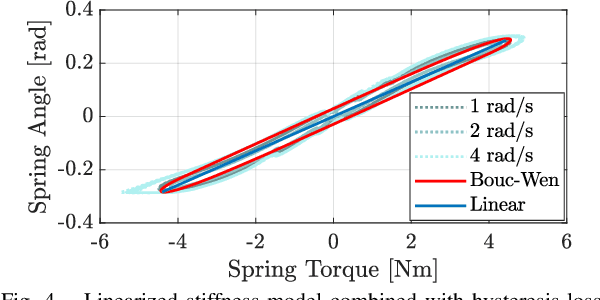
Elastic actuation taps into elastic elements' energy storage for dynamic motions beyond rigid actuation. While Series Elastic Actuators (SEA) and Variable Stiffness Actuators (VSA) are highly sophisticated, they do not fully provide control over energy transfer timing. To overcome this problem on the basic system level, the Bi-Stiffness Actuation (BSA) concept was recently proposed. Theoretically, it allows for full link decoupling, while simultaneously being able to lock the spring in the drive train via a switch-and-hold mechanism. Thus, the user would be in full control of the potential energy storage and release timing. In this work, we introduce an initial proof-of-concept of Bi-Stiffness-Actuation in the form of a 1-DoF physical prototype, which is implemented using a modular testbed. We present a hybrid system model, as well as the mechatronic implementation of the actuator. We corroborate the feasibility of the concept by conducting a series of hardware experiments using an open-loop control signal obtained by trajectory optimization. Here, we compare the performance of the prototype with a comparable SEA implementation. We show that BSA outperforms SEA 1) in terms of maximum velocity at low final times and 2) in terms of the movement strategy itself: The clutch mechanism allows the BSA to generate consistent launch sequences while the SEA has to rely on lengthy and possibly dangerous oscillatory swing-up motions. Furthermore, we demonstrate that providing full control authority over the energy transfer timing and link decoupling allows the user to synchronously release both elastic joint and gravitational energy. This facilitates the optimal exploitation of elastic and gravitational potentials in a synergistic manner.
Fast yet predictable braking manoeuvers for real-time robot control
Jun 10, 2023This paper proposes a framework for generating fast, smooth and predictable braking manoeuvers for a controlled robot. The proposed framework integrates two approaches to obtain feasible modal limits for designing braking trajectories. The first approach is real-time capable but conservative considering the usage of the available feasible actuator control region, resulting in longer braking times. In contrast, the second approach maximizes the used braking control inputs at the cost of requiring more time to evaluate larger, feasible modal limits via optimization. Both approaches allow for predicting the robot's stopping trajectory online. In addition, we also formulated and solved a constrained, nonlinear final-time minimization problem to find optimal torque inputs. The optimal solutions were used as a benchmark to evaluate the performance of the proposed predictable braking framework. A comparative study was compiled in simulation versus a classical optimal controller on a 7-DoF robot arm with only three moving joints. The results verified the effectiveness of our proposed framework and its integrated approaches in achieving fast robot braking manoeuvers with accurate online predictions of the stopping trajectories and distances under various braking settings.
BSA -- Bi-Stiffness Actuation for optimally exploiting intrinsic compliance and inertial coupling effects in elastic joint robots
Dec 30, 2022Compliance in actuation has been exploited to generate highly dynamic maneuvers such as throwing that take advantage of the potential energy stored in joint springs. However, the energy storage and release could not be well-timed yet. On the contrary, for multi-link systems, the natural system dynamics might even work against the actual goal. With the introduction of variable stiffness actuators, this problem has been partially addressed. With a suitable optimal control strategy, the approximate decoupling of the motor from the link can be achieved to maximize the energy transfer into the distal link prior to launch. However, such continuous stiffness variation is complex and typically leads to oscillatory swing-up motions instead of clear launch sequences. To circumvent this issue, we investigate decoupling for speed maximization with a dedicated novel actuator concept denoted Bi-Stiffness Actuation. With this, it is possible to fully decouple the link from the joint mechanism by a switch-and-hold clutch and simultaneously keep the elastic energy stored. We show that with this novel paradigm, it is not only possible to reach the same optimal performance as with power-equivalent variable stiffness actuation, but even directly control the energy transfer timing. This is a major step forward compared to previous optimal control approaches, which rely on optimizing the full time-series control input.
* Accepted version of article that has been published in 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
ISO/TS 15066: How Different Interpretations Affect Risk Assessment
Mar 05, 2022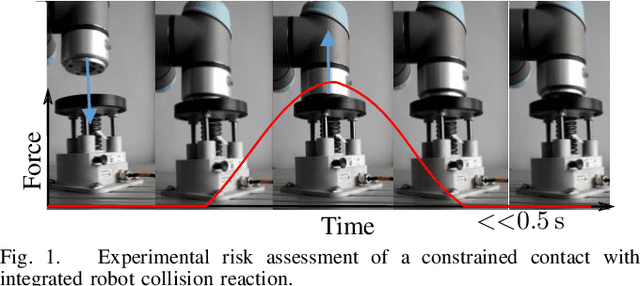
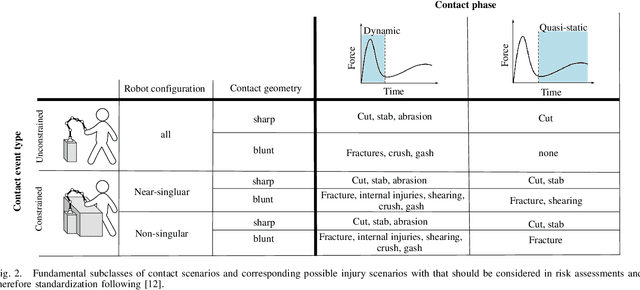
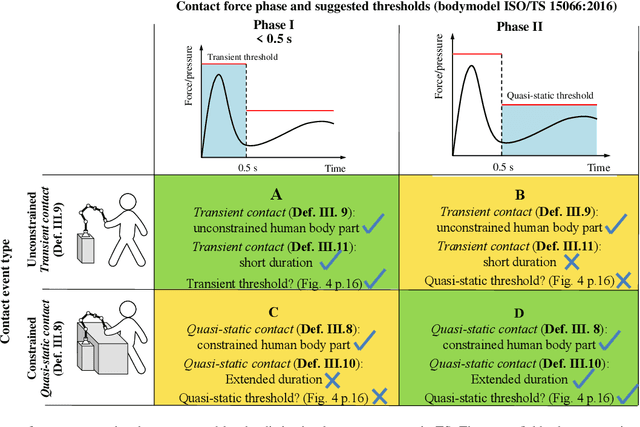
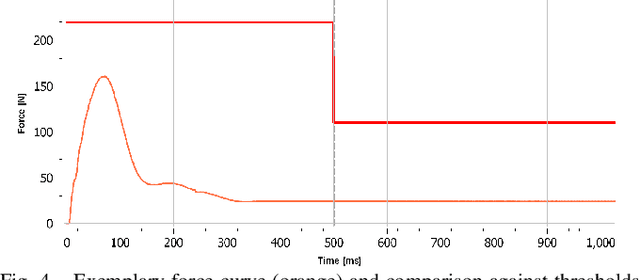
The current technical specification ISO/TS15066:2016(E) for safe human-robot interaction contains logically conflicting definitions for the contact between human and robot. This may result in different interpretations for the contact classification and thus no unique outcome can be expected, which may even cause a risk to the human. In previous work, we showed a first set of implications. This paper addresses the possible interpretations of a collision scenario as a result of the varying interpretations for a risk assessment. With an experiment including four commercially available robot systems we demonstrate the procedure of the risk assessment following the different interpretations of the TS. The results indicate possible incorrect use of the technical specification, which we believe needs to be resolved in future revisions. For this, we suggest tools in form of a decision tree and constrained collision force maps, which enable a simple, unambiguous risk assessment for HRI.
Expectable Motion Unit: Avoiding Hazards From Human Involuntary Motions in Human-Robot Interaction
Sep 15, 2021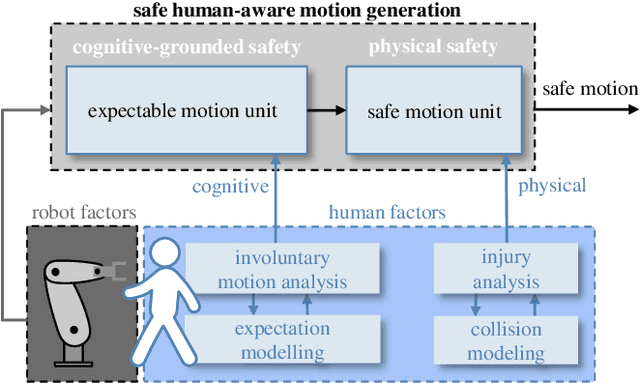

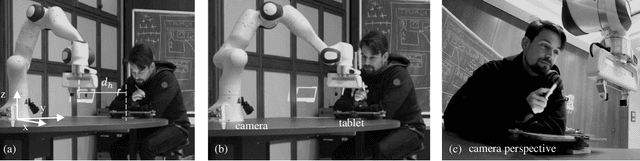
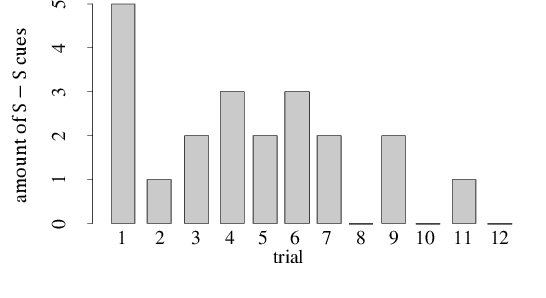
In robotics, many control and planning schemes have been developed that ensure the human physical safety in human-robot interaction. The human psychological state and expectation towards the robot, however, are typically neglected. Even if the robot behaviour is regarded as biomechanically safe, humans may still react with rapid involuntary motion (IM) caused by startle or surprise. Obviously, such sudden, uncontrolled motions can jeopardize safety and should be prevented by any means. In this paper, we propose the Expectable Motion Unit (EMU) concept which ensures that a certain probability of IM occurrence is not exceeded in a typical HRI setting. Based on a model of IM occurrence that we generate through an experiment with 29 participants, the mapping between robot velocity, robot-human distance, and the relative frequency of IM occurrence is established. This mapping is processed towards a real-time capable robot motion generator, which limits the robot velocity during task execution if necessary. The EMU is combined with the well-established Safe Motion Unit in order to integrate both physical and psychological safety knowledge and data into a holistic safety framework. In a validation experiment, it was shown that the EMU successfully avoids human IM in five out of six cases.