 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal Control for Clutched-Elastic Robots: A Contact-Implicit Approach
Jul 17, 2024



Intrinsically elastic robots surpass their rigid counterparts in a range of different characteristics. By temporarily storing potential energy and subsequently converting it to kinetic energy, elastic robots are capable of highly dynamic motions even with limited motor power. However, the time-dependency of this energy storage and release mechanism remains one of the major challenges in controlling elastic robots. A possible remedy is the introduction of locking elements (i.e. clutches and brakes) in the drive train. This gives rise to a new class of robots, so-called clutched-elastic robots (CER), with which it is possible to precisely control the energy-transfer timing. A prevalent challenge in the realm of CERs is the automatic discovery of clutch sequences. Due to complexity, many methods still rely on pre-defined modes. In this paper, we introduce a novel contact-implicit scheme designed to optimize both control input and clutch sequence simultaneously. A penalty in the objective function ensures the prevention of unnecessary clutch transitions. We empirically demonstrate the effectiveness of our proposed method on a double pendulum equipped with two of our newly proposed clutch-based Bi-Stiffness Actuators (BSA).
Optimally Controlling the Timing of Energy Transfer in Elastic Joints: Experimental Validation of the Bi-Stiffness Actuation Concept
Sep 14, 2023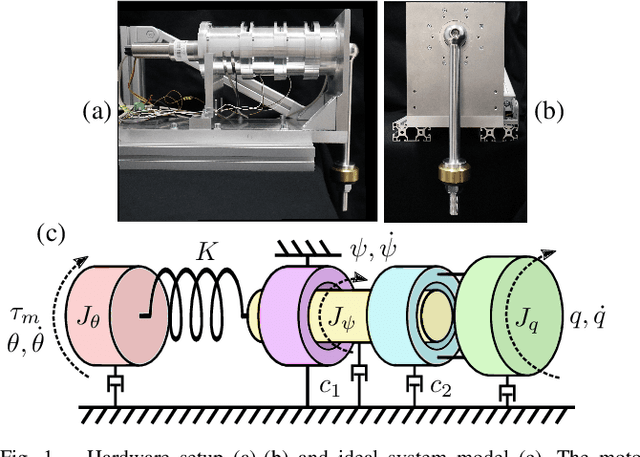
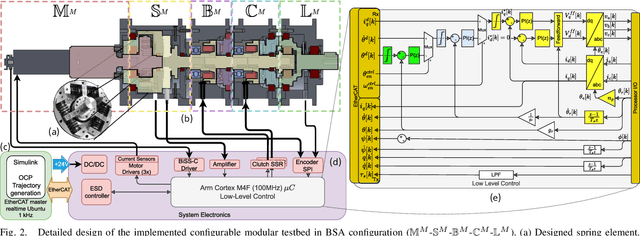
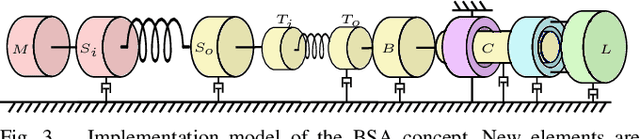
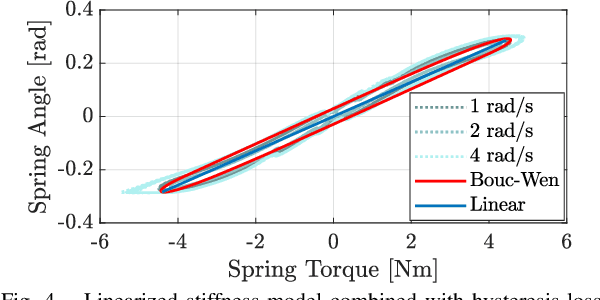
Elastic actuation taps into elastic elements' energy storage for dynamic motions beyond rigid actuation. While Series Elastic Actuators (SEA) and Variable Stiffness Actuators (VSA) are highly sophisticated, they do not fully provide control over energy transfer timing. To overcome this problem on the basic system level, the Bi-Stiffness Actuation (BSA) concept was recently proposed. Theoretically, it allows for full link decoupling, while simultaneously being able to lock the spring in the drive train via a switch-and-hold mechanism. Thus, the user would be in full control of the potential energy storage and release timing. In this work, we introduce an initial proof-of-concept of Bi-Stiffness-Actuation in the form of a 1-DoF physical prototype, which is implemented using a modular testbed. We present a hybrid system model, as well as the mechatronic implementation of the actuator. We corroborate the feasibility of the concept by conducting a series of hardware experiments using an open-loop control signal obtained by trajectory optimization. Here, we compare the performance of the prototype with a comparable SEA implementation. We show that BSA outperforms SEA 1) in terms of maximum velocity at low final times and 2) in terms of the movement strategy itself: The clutch mechanism allows the BSA to generate consistent launch sequences while the SEA has to rely on lengthy and possibly dangerous oscillatory swing-up motions. Furthermore, we demonstrate that providing full control authority over the energy transfer timing and link decoupling allows the user to synchronously release both elastic joint and gravitational energy. This facilitates the optimal exploitation of elastic and gravitational potentials in a synergistic manner.
BSA -- Bi-Stiffness Actuation for optimally exploiting intrinsic compliance and inertial coupling effects in elastic joint robots
Dec 30, 2022Compliance in actuation has been exploited to generate highly dynamic maneuvers such as throwing that take advantage of the potential energy stored in joint springs. However, the energy storage and release could not be well-timed yet. On the contrary, for multi-link systems, the natural system dynamics might even work against the actual goal. With the introduction of variable stiffness actuators, this problem has been partially addressed. With a suitable optimal control strategy, the approximate decoupling of the motor from the link can be achieved to maximize the energy transfer into the distal link prior to launch. However, such continuous stiffness variation is complex and typically leads to oscillatory swing-up motions instead of clear launch sequences. To circumvent this issue, we investigate decoupling for speed maximization with a dedicated novel actuator concept denoted Bi-Stiffness Actuation. With this, it is possible to fully decouple the link from the joint mechanism by a switch-and-hold clutch and simultaneously keep the elastic energy stored. We show that with this novel paradigm, it is not only possible to reach the same optimal performance as with power-equivalent variable stiffness actuation, but even directly control the energy transfer timing. This is a major step forward compared to previous optimal control approaches, which rely on optimizing the full time-series control input.
* Accepted version of article that has been published in 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)