 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUNCLE-Grasp: Uncertainty-Aware Grasping of Leaf-Occluded Strawberries
Jan 20, 2026Robotic strawberry harvesting is challenging under partial occlusion, where leaves induce significant geometric uncertainty and make grasp decisions based on a single deterministic shape estimate unreliable. From a single partial observation, multiple incompatible 3D completions may be plausible, causing grasps that appear feasible on one completion to fail on another. We propose an uncertainty-aware grasping pipeline for partially occluded strawberries that explicitly models completion uncertainty arising from both occlusion and learned shape reconstruction. Our approach uses point cloud completion with Monte Carlo dropout to sample multiple shape hypotheses, generates candidate grasps for each completion, and evaluates grasp feasibility using physically grounded force-closure-based metrics. Rather than selecting a grasp based on a single estimate, we aggregate feasibility across completions and apply a conservative lower confidence bound (LCB) criterion to decide whether a grasp should be attempted or safely abstained. We evaluate the proposed method in simulation and on a physical robot across increasing levels of synthetic and real leaf occlusion. Results show that uncertainty-aware decision making enables reliable abstention from high-risk grasp attempts under severe occlusion while maintaining robust grasp execution when geometric confidence is sufficient, outperforming deterministic baselines in both simulated and physical robot experiments.
TacDiffusion: Force-domain Diffusion Policy for Precise Tactile Manipulation
Sep 17, 2024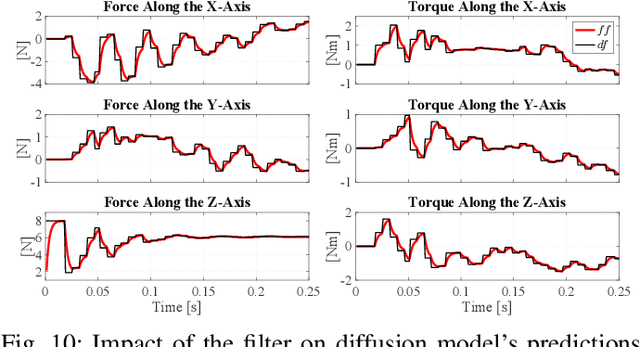
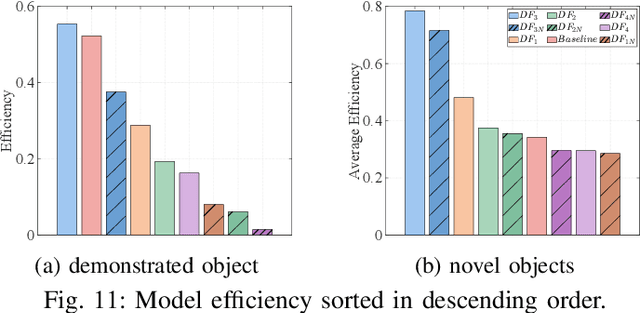
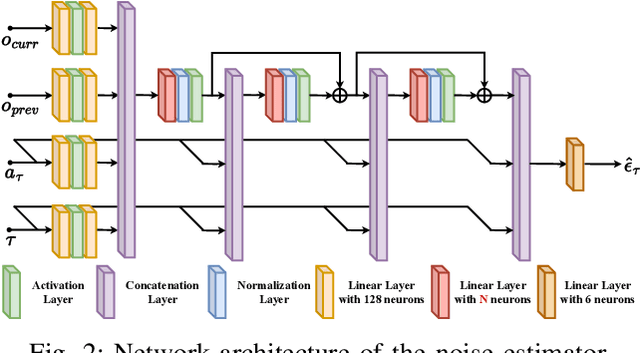
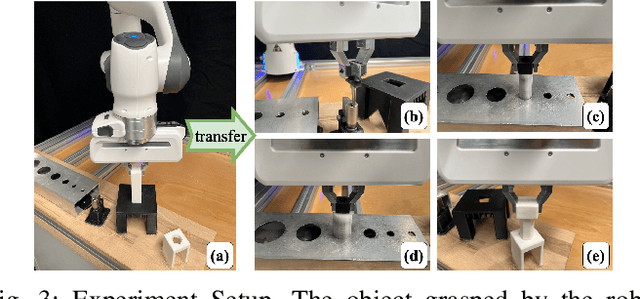
Assembly is a crucial skill for robots in both modern manufacturing and service robotics. However, mastering transferable insertion skills that can handle a variety of high-precision assembly tasks remains a significant challenge. This paper presents a novel framework that utilizes diffusion models to generate 6D wrench for high-precision tactile robotic insertion tasks. It learns from demonstrations performed on a single task and achieves a zero-shot transfer success rate of 95.7% across various novel high-precision tasks. Our method effectively inherits the self-adaptability demonstrated by our previous work. In this framework, we address the frequency misalignment between the diffusion policy and the real-time control loop with a dynamic system-based filter, significantly improving the task success rate by 9.15%. Furthermore, we provide a practical guideline regarding the trade-off between diffusion models' inference ability and speed.
LLM as BT-Planner: Leveraging LLMs for Behavior Tree Generation in Robot Task Planning
Sep 16, 2024



Robotic assembly tasks are open challenges due to the long task horizon and complex part relations. Behavior trees (BTs) are increasingly used in robot task planning for their modularity and flexibility, but manually designing them can be effort-intensive. Large language models (LLMs) have recently been applied in robotic task planning for generating action sequences, but their ability to generate BTs has not been fully investigated. To this end, We propose LLM as BT-planner, a novel framework to leverage LLMs for BT generation in robotic assembly task planning and execution. Four in-context learning methods are introduced to utilize the natural language processing and inference capabilities of LLMs to produce task plans in BT format, reducing manual effort and ensuring robustness and comprehensibility. We also evaluate the performance of fine-tuned, fewer-parameter LLMs on the same tasks. Experiments in simulated and real-world settings show that our framework enhances LLMs' performance in BT generation, improving success rates in BT generation through in-context learning and supervised fine-tuning.
Time-Optimized Trajectory Planning for Non-Prehensile Object Transportation in 3D
Aug 29, 2024Non-prehensile object transportation offers a way to enhance robotic performance in object manipulation tasks, especially with unstable objects. Effective trajectory planning requires simultaneous consideration of robot motion constraints and object stability. Here, we introduce a physical model for object stability and propose a novel trajectory planning approach for non-prehensile transportation along arbitrary straight lines in 3D space. Validation with a 7-DoF Franka Panda robot confirms improved transportation speed via tray rotation integration while ensuring object stability and robot motion constraints.
OPENGRASP-LITE Version 1.0: A Tactile Artificial Hand with a Compliant Linkage Mechanism
Aug 05, 2024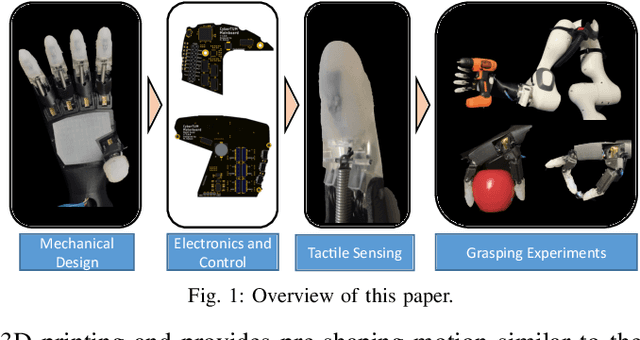
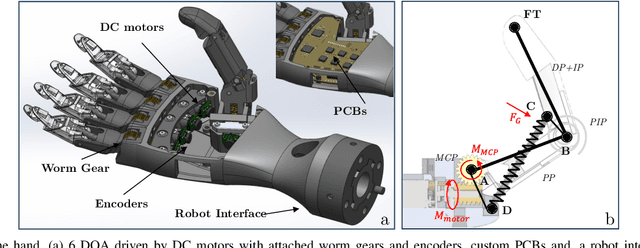
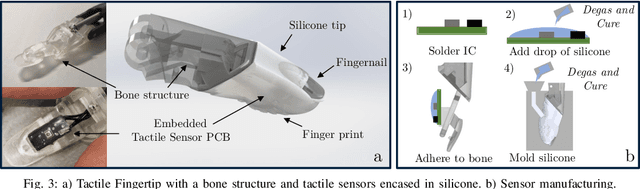
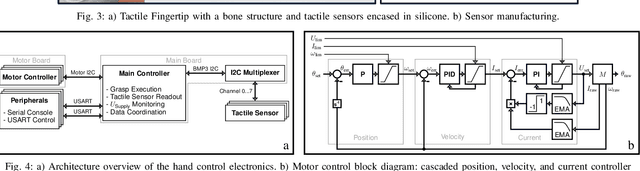
Recent research has seen notable progress in the development of linkage-based artificial hands. While previous designs have focused on adaptive grasping, dexterity and biomimetic artificial skin, only a few systems have proposed a lightweight, accessible solution integrating tactile sensing with a compliant linkage-based mechanism. This paper introduces OPENGRASP LITE, an open-source, highly integrated, tactile, and lightweight artificial hand. Leveraging compliant linkage systems and MEMS barometer-based tactile sensing, it offers versatile grasping capabilities with six degrees of actuation. By providing tactile sensors and enabling soft grasping, it serves as an accessible platform for further research in tactile artificial hands.
Autonomous and Teleoperation Control of a Drawing Robot Avatar
Jul 29, 2024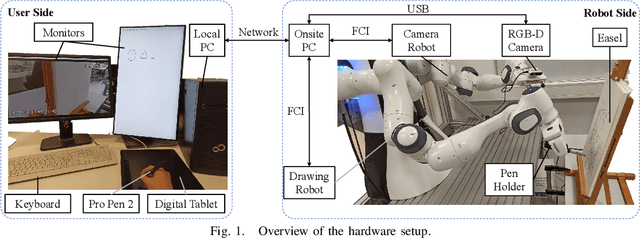
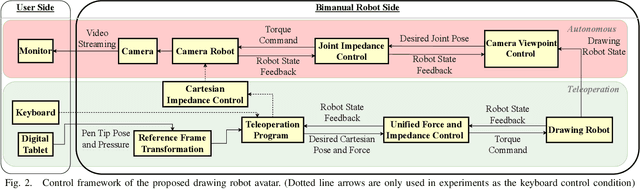
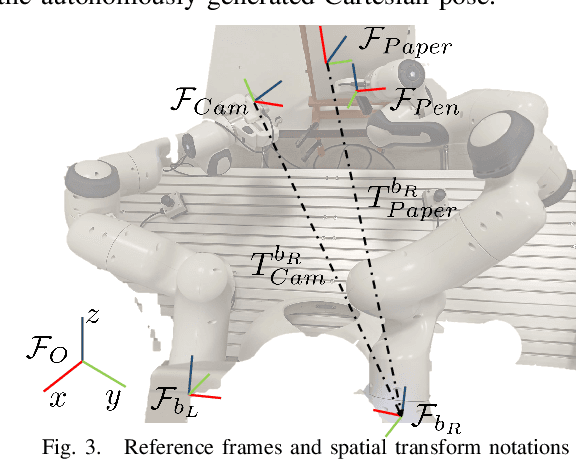
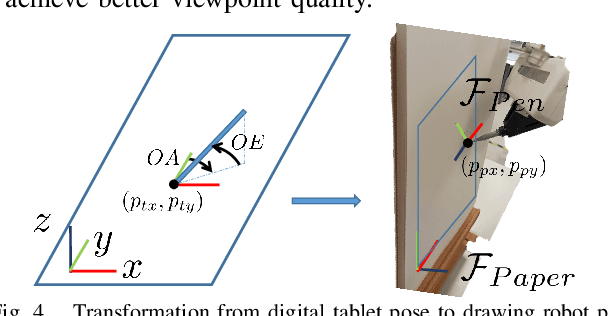
A drawing robot avatar is a robotic system that allows for telepresence-based drawing, enabling users to remotely control a robotic arm and create drawings in real-time from a remote location. The proposed control framework aims to improve bimanual robot telepresence quality by reducing the user workload and required prior knowledge through the automation of secondary or auxiliary tasks. The introduced novel method calculates the near-optimal Cartesian end-effector pose in terms of visual feedback quality for the attached eye-to-hand camera with motion constraints in consideration. The effectiveness is demonstrated by conducting user studies of drawing reference shapes using the implemented robot avatar compared to stationary and teleoperated camera pose conditions. Our results demonstrate that the proposed control framework offers improved visual feedback quality and drawing performance.
Optimal Control for Clutched-Elastic Robots: A Contact-Implicit Approach
Jul 17, 2024



Intrinsically elastic robots surpass their rigid counterparts in a range of different characteristics. By temporarily storing potential energy and subsequently converting it to kinetic energy, elastic robots are capable of highly dynamic motions even with limited motor power. However, the time-dependency of this energy storage and release mechanism remains one of the major challenges in controlling elastic robots. A possible remedy is the introduction of locking elements (i.e. clutches and brakes) in the drive train. This gives rise to a new class of robots, so-called clutched-elastic robots (CER), with which it is possible to precisely control the energy-transfer timing. A prevalent challenge in the realm of CERs is the automatic discovery of clutch sequences. Due to complexity, many methods still rely on pre-defined modes. In this paper, we introduce a novel contact-implicit scheme designed to optimize both control input and clutch sequence simultaneously. A penalty in the objective function ensures the prevention of unnecessary clutch transitions. We empirically demonstrate the effectiveness of our proposed method on a double pendulum equipped with two of our newly proposed clutch-based Bi-Stiffness Actuators (BSA).
Learning Barrier-Certified Polynomial Dynamical Systems for Obstacle Avoidance with Robots
Mar 13, 2024Established techniques that enable robots to learn from demonstrations are based on learning a stable dynamical system (DS). To increase the robots' resilience to perturbations during tasks that involve static obstacle avoidance, we propose incorporating barrier certificates into an optimization problem to learn a stable and barrier-certified DS. Such optimization problem can be very complex or extremely conservative when the traditional linear parameter-varying formulation is used. Thus, different from previous approaches in the literature, we propose to use polynomial representations for DSs, which yields an optimization problem that can be tackled by sum-of-squares techniques. Finally, our approach can handle obstacle shapes that fall outside the scope of assumptions typically found in the literature concerning obstacle avoidance within the DS learning framework. Supplementary material can be found at the project webpage: https://martinschonger.github.io/abc-ds
Optimally Controlling the Timing of Energy Transfer in Elastic Joints: Experimental Validation of the Bi-Stiffness Actuation Concept
Sep 14, 2023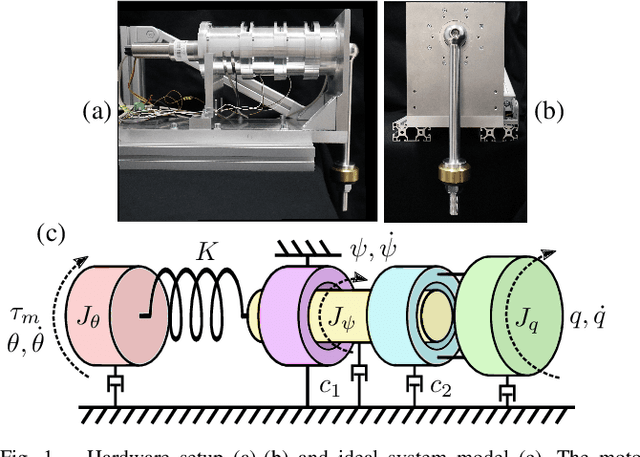
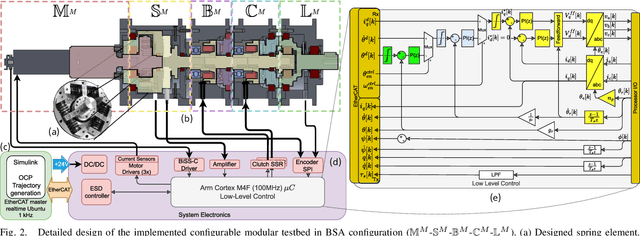
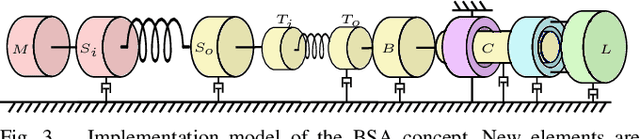
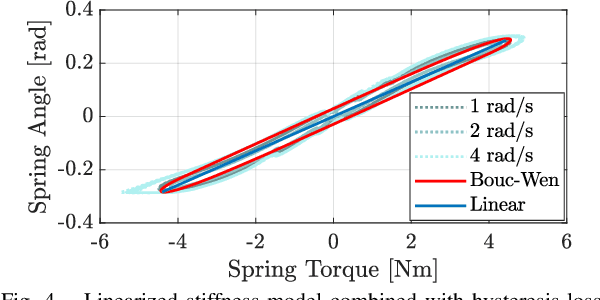
Elastic actuation taps into elastic elements' energy storage for dynamic motions beyond rigid actuation. While Series Elastic Actuators (SEA) and Variable Stiffness Actuators (VSA) are highly sophisticated, they do not fully provide control over energy transfer timing. To overcome this problem on the basic system level, the Bi-Stiffness Actuation (BSA) concept was recently proposed. Theoretically, it allows for full link decoupling, while simultaneously being able to lock the spring in the drive train via a switch-and-hold mechanism. Thus, the user would be in full control of the potential energy storage and release timing. In this work, we introduce an initial proof-of-concept of Bi-Stiffness-Actuation in the form of a 1-DoF physical prototype, which is implemented using a modular testbed. We present a hybrid system model, as well as the mechatronic implementation of the actuator. We corroborate the feasibility of the concept by conducting a series of hardware experiments using an open-loop control signal obtained by trajectory optimization. Here, we compare the performance of the prototype with a comparable SEA implementation. We show that BSA outperforms SEA 1) in terms of maximum velocity at low final times and 2) in terms of the movement strategy itself: The clutch mechanism allows the BSA to generate consistent launch sequences while the SEA has to rely on lengthy and possibly dangerous oscillatory swing-up motions. Furthermore, we demonstrate that providing full control authority over the energy transfer timing and link decoupling allows the user to synchronously release both elastic joint and gravitational energy. This facilitates the optimal exploitation of elastic and gravitational potentials in a synergistic manner.
Towards Connecting Control to Perception: High-Performance Whole-Body Collision Avoidance Using Control-Compatible Obstacles
Sep 13, 2023One of the most important aspects of autonomous systems is safety. This includes ensuring safe human-robot and safe robot-environment interaction when autonomously performing complex tasks or in collaborative scenarios. Although several methods have been introduced to tackle this, most are unsuitable for real-time applications and require carefully hand-crafted obstacle descriptions. In this work, we propose a method combining high-frequency and real-time self and environment collision avoidance of a robotic manipulator with low-frequency, multimodal, and high-resolution environmental perceptions accumulated in a digital twin system. Our method is based on geometric primitives, so-called primitive skeletons. These, in turn, are information-compressed and real-time compatible digital representations of the robot's body and environment, automatically generated from ultra-realistic virtual replicas of the real world provided by the digital twin. Our approach is a key enabler for closing the loop between environment perception and robot control by providing the millisecond real-time control stage with a current and accurate world description, empowering it to react to environmental changes. We evaluate our whole-body collision avoidance on a 9-DOFs robot system through five experiments, demonstrating the functionality and efficiency of our framework.