 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimizing Interaction Space: Enlarging the Capture Volume for Multiple Portable Motion Capture Devices
Aug 30, 2024Markerless motion capture devices such as the Leap Motion Controller (LMC) have been extensively used for tracking hand, wrist, and forearm positions as an alternative to Marker-based Motion Capture (MMC). However, previous studies have highlighted the subpar performance of LMC in reliably recording hand kinematics. In this study, we employ four LMC devices to optimize their collective tracking volume, aiming to enhance the accuracy and precision of hand kinematics. Through Monte Carlo simulation, we determine an optimized layout for the four LMC devices and subsequently conduct reliability and validity experiments encompassing 1560 trials across ten subjects. The combined tracking volume is validated against an MMC system, particularly for kinematic movements involving wrist, index, and thumb flexion. Utilizing calculation resources in one computer, our result of the optimized configuration has a better visibility rate with a value of 0.05 $\pm$ 0.55 compared to the initial configuration with -0.07 $\pm$ 0.40. Multiple Leap Motion Controllers (LMCs) have proven to increase the interaction space of capture volume but are still unable to give agreeable measurements from dynamic movement.
Functional kinematic and kinetic requirements of the upper limb during activities of daily living: a recommendation on necessary joint capabilities for prosthetic arms
Aug 26, 2024



Prosthetic limb abandonment remains an unsolved challenge as amputees consistently reject their devices. Current prosthetic designs often fail to balance human-like perfomance with acceptable device weight, highlighting the need for optimised designs tailored to modern tasks. This study aims to provide a comprehensive dataset of joint kinematics and kinetics essential for performing activities of daily living (ADL), thereby informing the design of more functional and user-friendly prosthetic devices. Functionally required Ranges of Motion (ROM), velocities, and torques for the Glenohumeral (rotation), elbow, Radioulnar, and wrist joints were computed using motion capture data from 12 subjects performing 24 ADLs. Our approach included the computation of joint torques for varying mass and inertia properties of the upper limb, while torques induced by the manipulation of experimental objects were considered by their interaction wrench with the subjects hand. Joint torques pertaining to individual ADL scaled linearly with limb and object mass and mass distribution, permitting their generalisation to not explicitly simulated limb and object dynamics with linear regressors (LRM), exhibiting coefficients of determination R = 0.99 pm 0.01. Exemplifying an application of data-driven prosthesis design, we optimise wrist axes orientations for two serial and two differential joint configurations. Optimised axes reduced peak power requirements, between 22 to 38 percent compared to anatomical configurations, by exploiting high torque correlations between Ulnar deviation and wrist flexion/extension joints. This study offers critical insights into the functional requirements of upper limb prostheses, providing a valuable foundation for data-driven prosthetic design that addresses key user concerns and enhances device adoption.
Identification and validation of the dynamic model of a tendon-driven anthropomorphic finger
Aug 23, 2024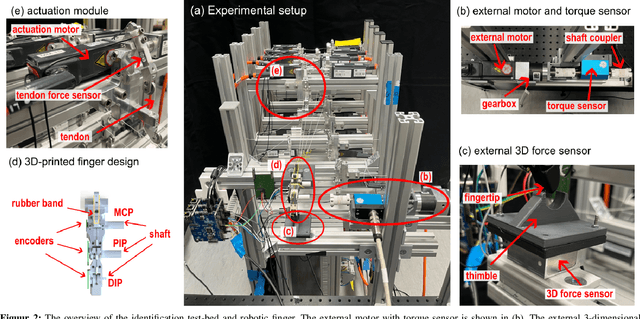
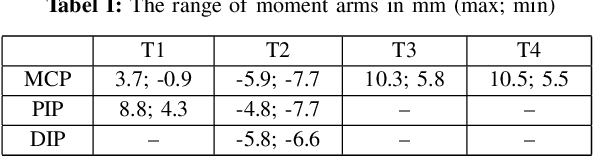
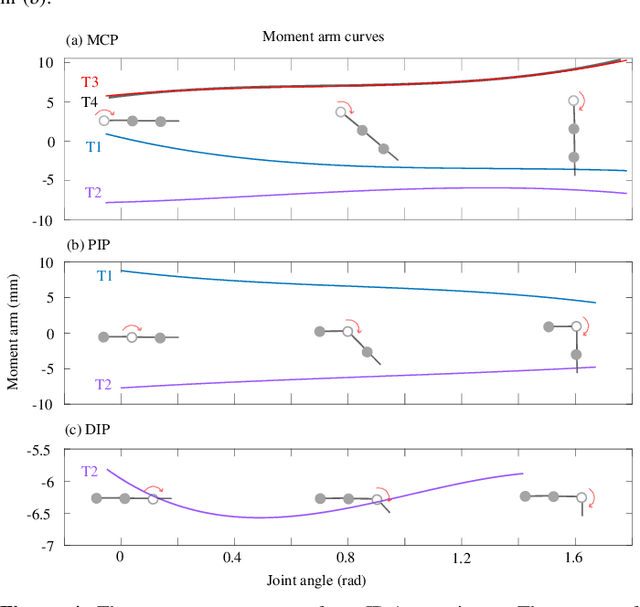
This study addresses the absence of an identification framework to quantify a comprehensive dynamic model of human and anthropomorphic tendon-driven fingers, which is necessary to investigate the physiological properties of human fingers and improve the control of robotic hands. First, a generalized dynamic model was formulated, which takes into account the inherent properties of such a mechanical system. This includes rigid-body dynamics, coupling matrix, joint viscoelasticity, and tendon friction. Then, we propose a methodology comprising a series of experiments, for step-wise identification and validation of this dynamic model. Moreover, an experimental setup was designed and constructed that features actuation modules and peripheral sensors to facilitate the identification process. To verify the proposed methodology, a 3D-printed robotic finger based on the index finger design of the Dexmart hand was developed, and the proposed experiments were executed to identify and validate its dynamic model. This study could be extended to explore the identification of cadaver hands, aiming for a consistent dataset from a single cadaver specimen to improve the development of musculoskeletal hand models.
Object Augmentation Algorithm: Computing virtual object motion and object induced interaction wrench from optical markers
Aug 14, 2024



This study addresses the critical need for diverse and comprehensive data focused on human arm joint torques while performing activities of daily living (ADL). Previous studies have often overlooked the influence of objects on joint torques during ADL, resulting in limited datasets for analysis. To address this gap, we propose an Object Augmentation Algorithm (OAA) capable of augmenting existing marker-based databases with virtual object motions and object-induced joint torque estimations. The OAA consists of five phases: (1) computing hand coordinate systems from optical markers, (2) characterising object movements with virtual markers, (3) calculating object motions through inverse kinematics (IK), (4) determining the wrench necessary for prescribed object motion using inverse dynamics (ID), and (5) computing joint torques resulting from object manipulation. The algorithm's accuracy is validated through trajectory tracking and torque analysis on a 7+4 degree of freedom (DoF) robotic hand-arm system, manipulating three unique objects. The results show that the OAA can accurately and precisely estimate 6 DoF object motion and object-induced joint torques. Correlations between computed and measured quantities were > 0.99 for object trajectories and > 0.93 for joint torques. The OAA was further shown to be robust to variations in the number and placement of input markers, which are expected between databases. Differences between repeated experiments were minor but significant (p < 0.05). The algorithm expands the scope of available data and facilitates more comprehensive analyses of human-object interaction dynamics.
OPENGRASP-LITE Version 1.0: A Tactile Artificial Hand with a Compliant Linkage Mechanism
Aug 05, 2024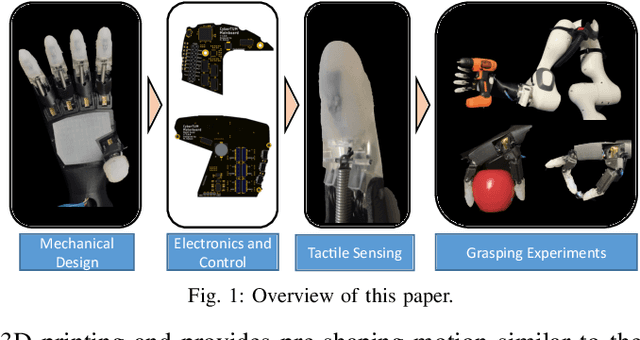
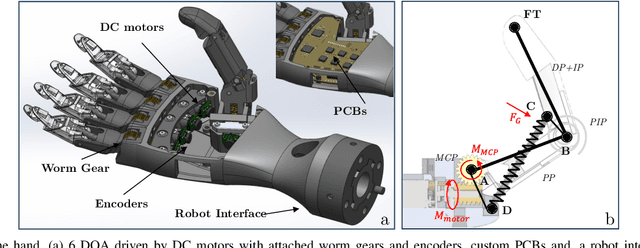
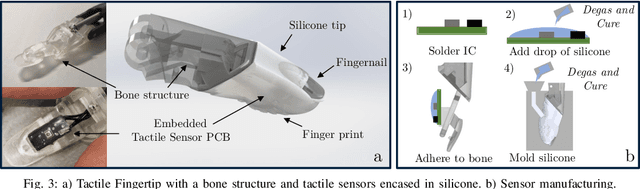
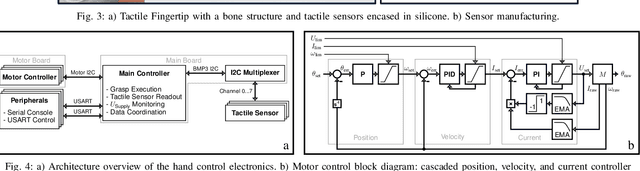
Recent research has seen notable progress in the development of linkage-based artificial hands. While previous designs have focused on adaptive grasping, dexterity and biomimetic artificial skin, only a few systems have proposed a lightweight, accessible solution integrating tactile sensing with a compliant linkage-based mechanism. This paper introduces OPENGRASP LITE, an open-source, highly integrated, tactile, and lightweight artificial hand. Leveraging compliant linkage systems and MEMS barometer-based tactile sensing, it offers versatile grasping capabilities with six degrees of actuation. By providing tactile sensors and enabling soft grasping, it serves as an accessible platform for further research in tactile artificial hands.