 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOPENGRASP-LITE Version 1.0: A Tactile Artificial Hand with a Compliant Linkage Mechanism
Aug 05, 2024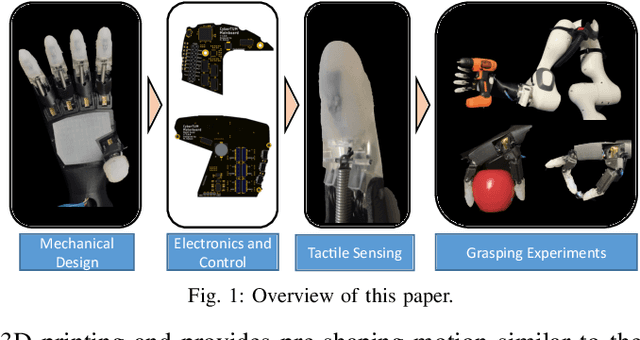
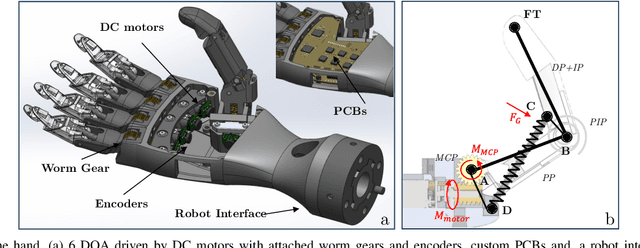
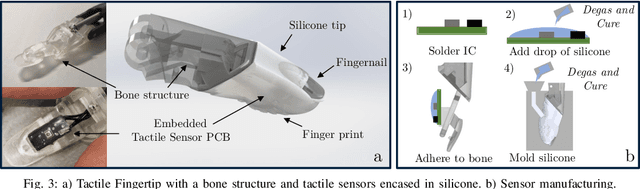
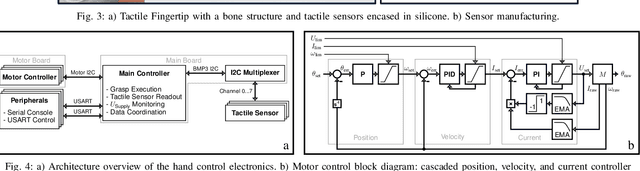
Recent research has seen notable progress in the development of linkage-based artificial hands. While previous designs have focused on adaptive grasping, dexterity and biomimetic artificial skin, only a few systems have proposed a lightweight, accessible solution integrating tactile sensing with a compliant linkage-based mechanism. This paper introduces OPENGRASP LITE, an open-source, highly integrated, tactile, and lightweight artificial hand. Leveraging compliant linkage systems and MEMS barometer-based tactile sensing, it offers versatile grasping capabilities with six degrees of actuation. By providing tactile sensors and enabling soft grasping, it serves as an accessible platform for further research in tactile artificial hands.
Automatic Traffic Scenario Conversion from OpenSCENARIO to CommonRoad
May 17, 2023



Scenarios are a crucial element for developing, testing, and verifying autonomous driving systems. However, open-source scenarios are often formulated using different terminologies. This limits their usage across different applications as many scenario representation formats are not directly compatible with each other. To address this problem, we present the first open-source converter from the OpenSCENARIO format to the CommonRoad format, which are two of the most popular scenario formats used in autonomous driving. Our converter employs a simulation tool to execute the dynamic elements defined by OpenSCENARIO. The converter is available at commonroad.in.tum.de and we demonstrate its usefulness by converting publicly available scenarios in the OpenSCENARIO format and evaluating them using CommonRoad tools.