 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlowCorrect: Efficient Interactive Correction of Generative Flow Policies for Robotic Manipulation
Feb 25, 2026Generative manipulation policies can fail catastrophically under deployment-time distribution shift, yet many failures are near-misses: the robot reaches almost-correct poses and would succeed with a small corrective motion. We present FlowCorrect, a deployment-time correction framework that converts near-miss failures into successes using sparse human nudges, without full policy retraining. During execution, a human provides brief corrective pose nudges via a lightweight VR interface. FlowCorrect uses these sparse corrections to locally adapt the policy, improving actions without retraining the backbone while preserving the model performance on previously learned scenarios. We evaluate on a real-world robot across three tabletop tasks: pick-and-place, pouring, and cup uprighting. With a low correction budget, FlowCorrect improves success on hard cases by 85\% while preserving performance on previously solved scenarios. The results demonstrate clearly that FlowCorrect learns only with very few demonstrations and enables fast and sample-efficient incremental, human-in-the-loop corrections of generative visuomotor policies at deployment time in real-world robotics.
VISO-Grasp: Vision-Language Informed Spatial Object-centric 6-DoF Active View Planning and Grasping in Clutter and Invisibility
Mar 16, 2025We propose VISO-Grasp, a novel vision-language-informed system designed to systematically address visibility constraints for grasping in severely occluded environments. By leveraging Foundation Models (FMs) for spatial reasoning and active view planning, our framework constructs and updates an instance-centric representation of spatial relationships, enhancing grasp success under challenging occlusions. Furthermore, this representation facilitates active Next-Best-View (NBV) planning and optimizes sequential grasping strategies when direct grasping is infeasible. Additionally, we introduce a multi-view uncertainty-driven grasp fusion mechanism that refines grasp confidence and directional uncertainty in real-time, ensuring robust and stable grasp execution. Extensive real-world experiments demonstrate that VISO-Grasp achieves a success rate of $87.5\%$ in target-oriented grasping with the fewest grasp attempts outperforming baselines. To the best of our knowledge, VISO-Grasp is the first unified framework integrating FMs into target-aware active view planning and 6-DoF grasping in environments with severe occlusions and entire invisibility constraints.
vMF-Contact: Uncertainty-aware Evidential Learning for Probabilistic Contact-grasp in Noisy Clutter
Nov 07, 2024Grasp learning in noisy environments, such as occlusions, sensor noise, and out-of-distribution (OOD) objects, poses significant challenges. Recent learning-based approaches focus primarily on capturing aleatoric uncertainty from inherent data noise. The epistemic uncertainty, which represents the OOD recognition, is often addressed by ensembles with multiple forward paths, limiting real-time application. In this paper, we propose an uncertainty-aware approach for 6-DoF grasp detection using evidential learning to comprehensively capture both uncertainties in real-world robotic grasping. As a key contribution, we introduce vMF-Contact, a novel architecture for learning hierarchical contact grasp representations with probabilistic modeling of directional uncertainty as von Mises-Fisher (vMF) distribution. To achieve this, we derive and analyze the theoretical formulation of the second-order objective on the posterior parametrization, providing formal guarantees for the model's ability to quantify uncertainty and improve grasp prediction performance. Moreover, we enhance feature expressiveness by applying partial point reconstructions as an auxiliary task, improving the comprehension of uncertainty quantification as well as the generalization to unseen objects. In the real-world experiments, our method demonstrates a significant improvement by 39% in the overall clearance rate compared to the baselines. Video is under https://www.youtube.com/watch?v=4aQsrDgdV8Y&t=12s
OPENGRASP-LITE Version 1.0: A Tactile Artificial Hand with a Compliant Linkage Mechanism
Aug 05, 2024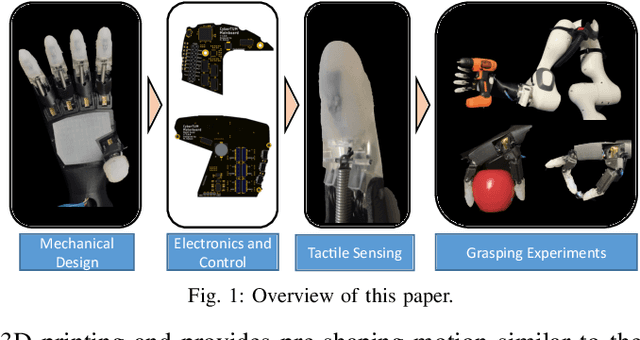
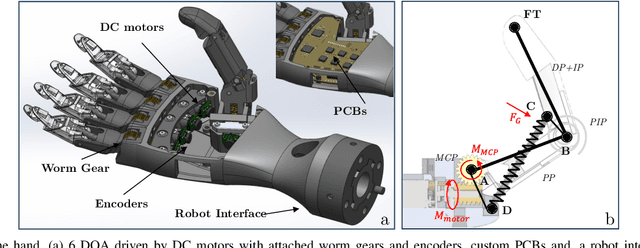
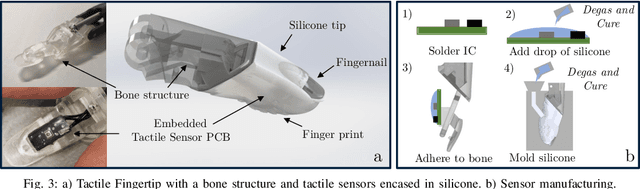
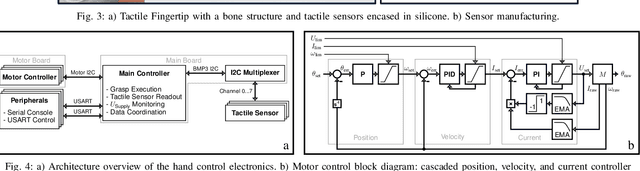
Recent research has seen notable progress in the development of linkage-based artificial hands. While previous designs have focused on adaptive grasping, dexterity and biomimetic artificial skin, only a few systems have proposed a lightweight, accessible solution integrating tactile sensing with a compliant linkage-based mechanism. This paper introduces OPENGRASP LITE, an open-source, highly integrated, tactile, and lightweight artificial hand. Leveraging compliant linkage systems and MEMS barometer-based tactile sensing, it offers versatile grasping capabilities with six degrees of actuation. By providing tactile sensors and enabling soft grasping, it serves as an accessible platform for further research in tactile artificial hands.