 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgevMF-Contact: Uncertainty-aware Evidential Learning for Probabilistic Contact-grasp in Noisy Clutter
Nov 07, 2024Grasp learning in noisy environments, such as occlusions, sensor noise, and out-of-distribution (OOD) objects, poses significant challenges. Recent learning-based approaches focus primarily on capturing aleatoric uncertainty from inherent data noise. The epistemic uncertainty, which represents the OOD recognition, is often addressed by ensembles with multiple forward paths, limiting real-time application. In this paper, we propose an uncertainty-aware approach for 6-DoF grasp detection using evidential learning to comprehensively capture both uncertainties in real-world robotic grasping. As a key contribution, we introduce vMF-Contact, a novel architecture for learning hierarchical contact grasp representations with probabilistic modeling of directional uncertainty as von Mises-Fisher (vMF) distribution. To achieve this, we derive and analyze the theoretical formulation of the second-order objective on the posterior parametrization, providing formal guarantees for the model's ability to quantify uncertainty and improve grasp prediction performance. Moreover, we enhance feature expressiveness by applying partial point reconstructions as an auxiliary task, improving the comprehension of uncertainty quantification as well as the generalization to unseen objects. In the real-world experiments, our method demonstrates a significant improvement by 39% in the overall clearance rate compared to the baselines. Video is under https://www.youtube.com/watch?v=4aQsrDgdV8Y&t=12s
Robust Analysis of Multi-Task Learning on a Complex Vision System
Feb 05, 2024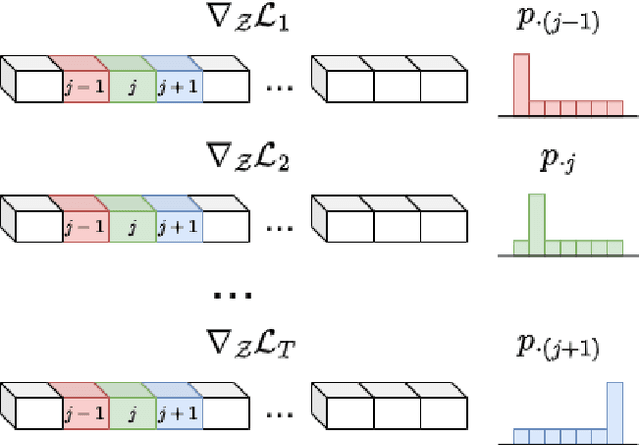
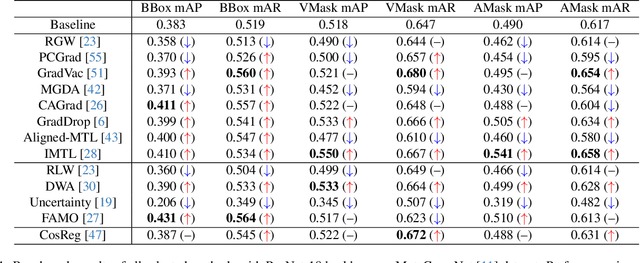
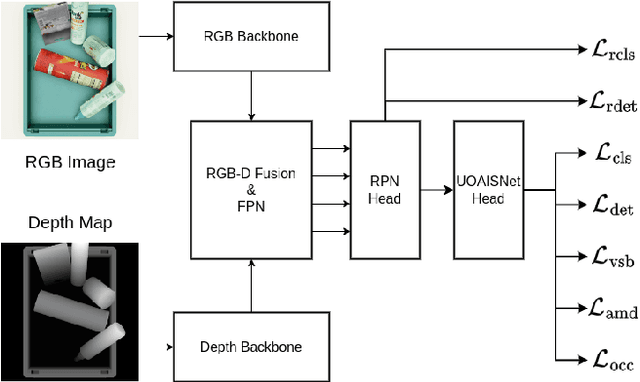
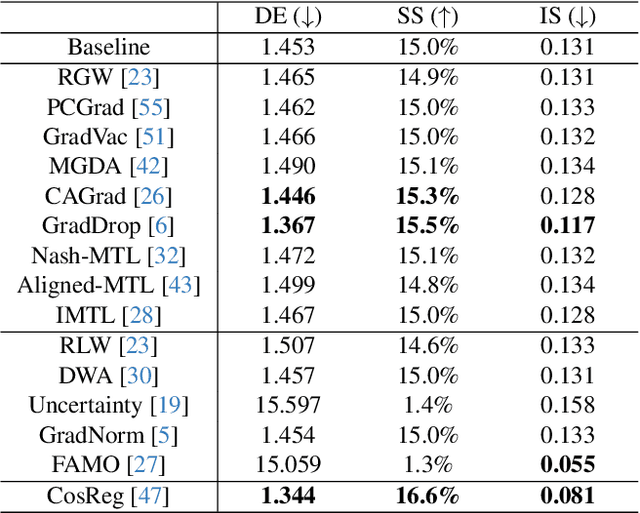
Multi-task learning (MTL) has been widely studied in the past decade. In particular, dozens of optimization algorithms have been proposed for different settings. While each of them claimed improvement when applied to certain models on certain datasets, there is still lack of deep understanding on the performance in complex real-worlds scenarios. We identify the gaps between research and application and make the following 4 contributions. (1) We comprehensively evaluate a large set of existing MTL optimization algorithms on the MetaGraspNet dataset designed for robotic grasping task, which is complex and has high real-world application values, and conclude the best-performing methods. (2) We empirically compare the method performance when applied on feature-level gradients versus parameter-level gradients over a large set of MTL optimization algorithms, and conclude that this feature-level gradients surrogate is reasonable when there are method-specific theoretical guarantee but not generalizable to all methods. (3) We provide insights on the problem of task interference and show that the existing perspectives of gradient angles and relative gradient norms do not precisely reflect the challenges of MTL, as the rankings of the methods based on these two indicators do not align well with those based on the test-set performance. (4) We provide a novel view of the task interference problem from the perspective of the latent space induced by the feature extractor and provide training monitoring results based on feature disentanglement.
MMRNet: Improving Reliability for Multimodal Computer Vision for Bin Picking via Multimodal Redundancy
Oct 19, 2022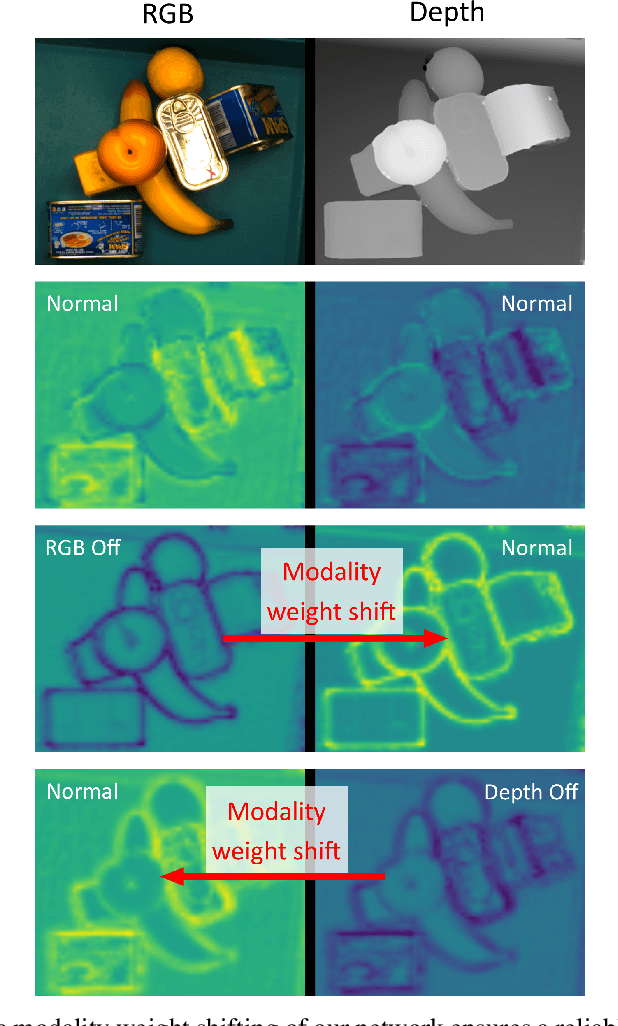
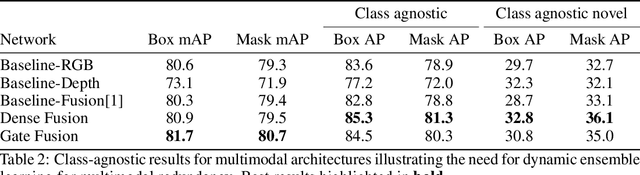
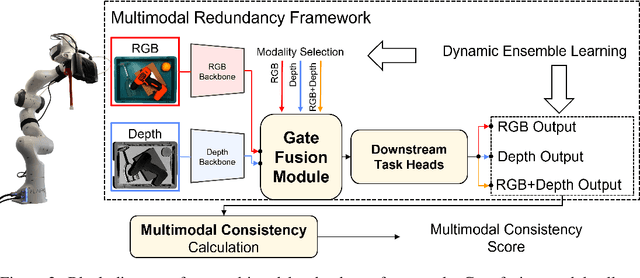

Recently, there has been tremendous interest in industry 4.0 infrastructure to address labor shortages in global supply chains. Deploying artificial intelligence-enabled robotic bin picking systems in real world has become particularly important for reducing labor demands and costs while increasing efficiency. To this end, artificial intelligence-enabled robotic bin picking systems may be used to automate bin picking, but may also cause expensive damage during an abnormal event such as a sensor failure. As such, reliability becomes a critical factor for translating artificial intelligence research to real world applications and products. In this paper, we propose a reliable vision system with MultiModal Redundancy (MMRNet) for tackling object detection and segmentation for robotic bin picking using data from different modalities. This is the first system that introduces the concept of multimodal redundancy to combat sensor failure issues during deployment. In particular, we realize the multimodal redundancy framework with a gate fusion module and dynamic ensemble learning. Finally, we present a new label-free multimodal consistency score that utilizes the output from all modalities to measure the overall system output reliability and uncertainty. Through experiments, we demonstrate that in an event of missing modality, our system provides a much more reliable performance compared to baseline models. We also demonstrate that our MC score is a more powerful reliability indicator for outputs during inference time where model generated confidence score are often over-confident.
MetaGraspNet: A Large-Scale Benchmark Dataset for Scene-Aware Ambidextrous Bin Picking via Physics-based Metaverse Synthesis
Aug 08, 2022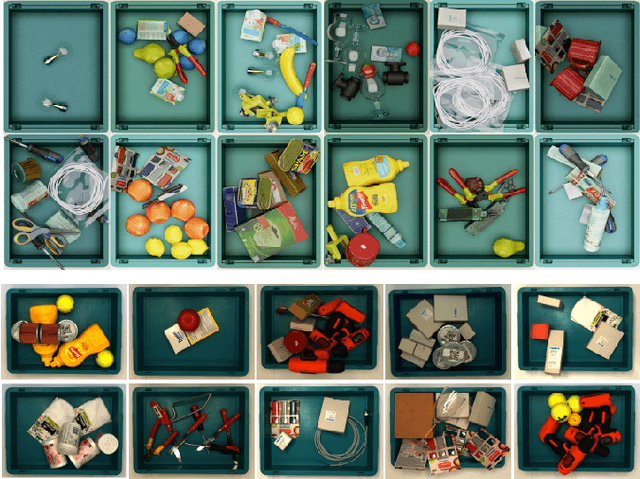
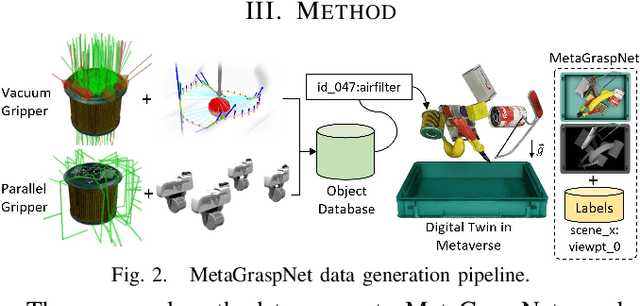
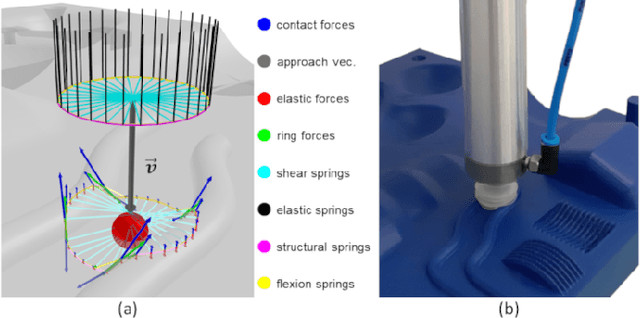
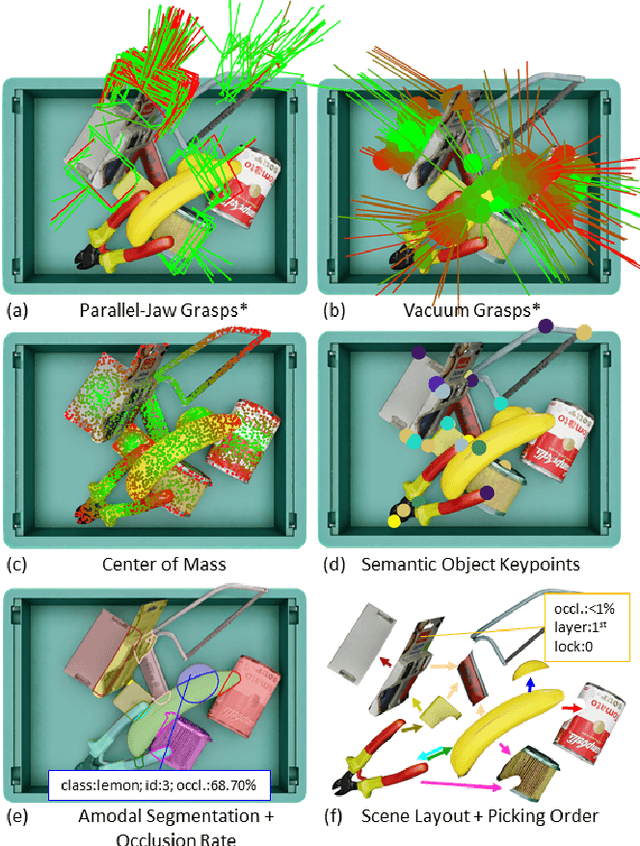
Autonomous bin picking poses significant challenges to vision-driven robotic systems given the complexity of the problem, ranging from various sensor modalities, to highly entangled object layouts, to diverse item properties and gripper types. Existing methods often address the problem from one perspective. Diverse items and complex bin scenes require diverse picking strategies together with advanced reasoning. As such, to build robust and effective machine-learning algorithms for solving this complex task requires significant amounts of comprehensive and high quality data. Collecting such data in real world would be too expensive and time prohibitive and therefore intractable from a scalability perspective. To tackle this big, diverse data problem, we take inspiration from the recent rise in the concept of metaverses, and introduce MetaGraspNet, a large-scale photo-realistic bin picking dataset constructed via physics-based metaverse synthesis. The proposed dataset contains 217k RGBD images across 82 different article types, with full annotations for object detection, amodal perception, keypoint detection, manipulation order and ambidextrous grasp labels for a parallel-jaw and vacuum gripper. We also provide a real dataset consisting of over 2.3k fully annotated high-quality RGBD images, divided into 5 levels of difficulties and an unseen object set to evaluate different object and layout properties. Finally, we conduct extensive experiments showing that our proposed vacuum seal model and synthetic dataset achieves state-of-the-art performance and generalizes to real world use-cases.
MetaGraspNet: A Large-Scale Benchmark Dataset for Vision-driven Robotic Grasping via Physics-based Metaverse Synthesis
Dec 30, 2021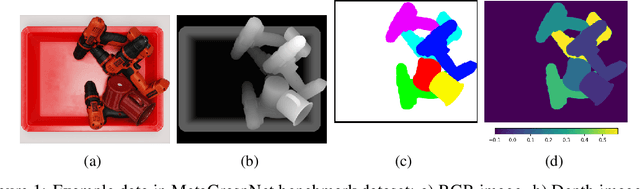



There has been increasing interest in smart factories powered by robotics systems to tackle repetitive, laborious tasks. One impactful yet challenging task in robotics-powered smart factory applications is robotic grasping: using robotic arms to grasp objects autonomously in different settings. Robotic grasping requires a variety of computer vision tasks such as object detection, segmentation, grasp prediction, pick planning, etc. While significant progress has been made in leveraging of machine learning for robotic grasping, particularly with deep learning, a big challenge remains in the need for large-scale, high-quality RGBD datasets that cover a wide diversity of scenarios and permutations. To tackle this big, diverse data problem, we are inspired by the recent rise in the concept of metaverse, which has greatly closed the gap between virtual worlds and the physical world. Metaverses allow us to create digital twins of real-world manufacturing scenarios and to virtually create different scenarios from which large volumes of data can be generated for training models. In this paper, we present MetaGraspNet: a large-scale benchmark dataset for vision-driven robotic grasping via physics-based metaverse synthesis. The proposed dataset contains 100,000 images and 25 different object types and is split into 5 difficulties to evaluate object detection and segmentation model performance in different grasping scenarios. We also propose a new layout-weighted performance metric alongside the dataset for evaluating object detection and segmentation performance in a manner that is more appropriate for robotic grasp applications compared to existing general-purpose performance metrics. Our benchmark dataset is available open-source on Kaggle, with the first phase consisting of detailed object detection, segmentation, layout annotations, and a layout-weighted performance metric script.