 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMMRNet: Improving Reliability for Multimodal Computer Vision for Bin Picking via Multimodal Redundancy
Paper and Code
Oct 19, 2022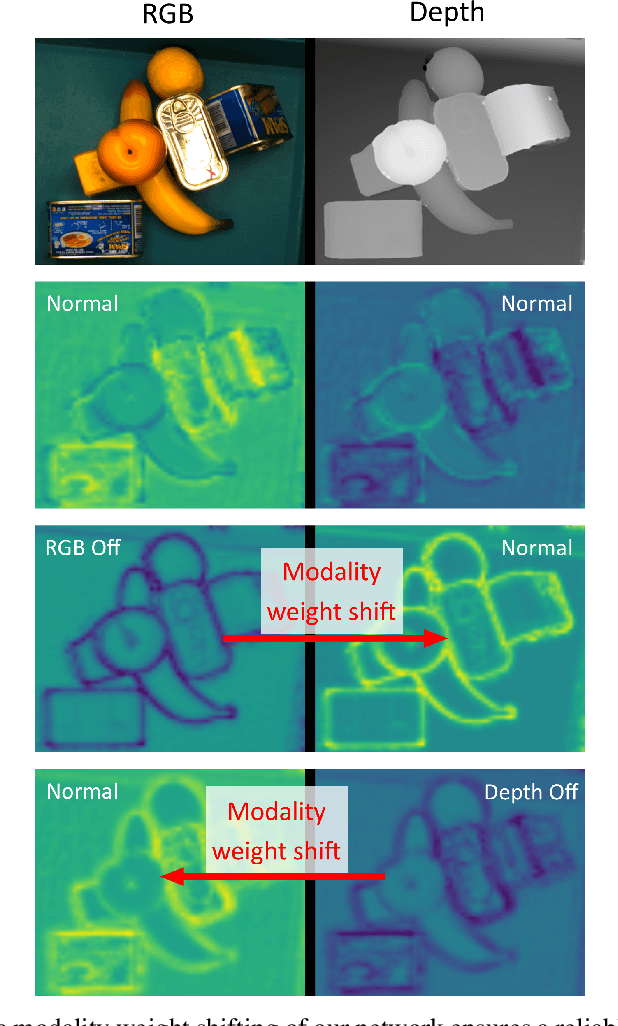
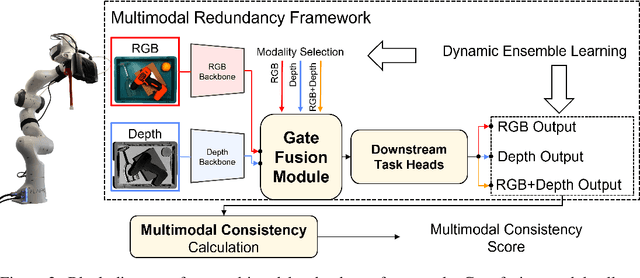

Recently, there has been tremendous interest in industry 4.0 infrastructure to address labor shortages in global supply chains. Deploying artificial intelligence-enabled robotic bin picking systems in real world has become particularly important for reducing labor demands and costs while increasing efficiency. To this end, artificial intelligence-enabled robotic bin picking systems may be used to automate bin picking, but may also cause expensive damage during an abnormal event such as a sensor failure. As such, reliability becomes a critical factor for translating artificial intelligence research to real world applications and products. In this paper, we propose a reliable vision system with MultiModal Redundancy (MMRNet) for tackling object detection and segmentation for robotic bin picking using data from different modalities. This is the first system that introduces the concept of multimodal redundancy to combat sensor failure issues during deployment. In particular, we realize the multimodal redundancy framework with a gate fusion module and dynamic ensemble learning. Finally, we present a new label-free multimodal consistency score that utilizes the output from all modalities to measure the overall system output reliability and uncertainty. Through experiments, we demonstrate that in an event of missing modality, our system provides a much more reliable performance compared to baseline models. We also demonstrate that our MC score is a more powerful reliability indicator for outputs during inference time where model generated confidence score are often over-confident.