 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProOOD: Prototype-Guided Out-of-Distribution 3D Occupancy Prediction
Apr 01, 20263D semantic occupancy prediction is central to autonomous driving, yet current methods are vulnerable to long-tailed class bias and out-of-distribution (OOD) inputs, often overconfidently assigning anomalies to rare classes. We present ProOOD, a lightweight, plug-and-play method that couples prototype-guided refinement with training-free OOD scoring. ProOOD comprises (i) prototype-guided semantic imputation that fills occluded regions with class-consistent features, (ii) prototype-guided tail mining that strengthens rare-class representations to curb OOD absorption, and (iii) EchoOOD, which fuses local logit coherence with local and global prototype matching to produce reliable voxel-level OOD scores. Extensive experiments on five datasets demonstrate that ProOOD achieves state-of-the-art performance on both in-distribution 3D occupancy prediction and OOD detection. On SemanticKITTI, it surpasses baselines by +3.57% mIoU overall and +24.80% tail-class mIoU; on VAA-KITTI, it improves AuPRCr by +19.34 points, with consistent gains across benchmarks. These improvements yield more calibrated occupancy estimates and more reliable OOD detection in safety-critical urban driving. The source code is publicly available at https://github.com/7uHeng/ProOOD.
Not an Obstacle for Dog, but a Hazard for Human: A Co-Ego Navigation System for Guide Dog Robots
Mar 20, 2026Guide dogs offer independence to Blind and Low-Vision (BLV) individuals, yet their limited availability leaves the vast majority of BLV users without access. Quadruped robotic guide dogs present a promising alternative, but existing systems rely solely on the robot's ground-level sensors for navigation, overlooking a critical class of hazards: obstacles that are transparent to the robot yet dangerous at human body height, such as bent branches. We term this the viewpoint asymmetry problem and present the first system to explicitly address it. Our Co-Ego system adopts a dual-branch obstacle avoidance framework that integrates the robot-centric ground sensing with the user's elevated egocentric perspective to ensure comprehensive navigation safety. Deployed on a quadruped robot, the system is evaluated in a controlled user study with sighted participants under blindfold across three conditions: unassisted, single-view, and cross-view fusion. Results demonstrate that cross-view fusion significantly reduces collision times and cognitive load, verifying the necessity of viewpoint complementarity for safe robotic guide dog navigation.
InterEdit: Navigating Text-Guided Multi-Human 3D Motion Editing
Mar 13, 2026Text-guided 3D motion editing has seen success in single-person scenarios, but its extension to multi-person settings is less explored due to limited paired data and the complexity of inter-person interactions. We introduce the task of multi-person 3D motion editing, where a target motion is generated from a source and a text instruction. To support this, we propose InterEdit3D, a new dataset with manual two-person motion change annotations, and a Text-guided Multi-human Motion Editing (TMME) benchmark. We present InterEdit, a synchronized classifier-free conditional diffusion model for TMME. It introduces Semantic-Aware Plan Token Alignment with learnable tokens to capture high-level interaction cues and an Interaction-Aware Frequency Token Alignment strategy using DCT and energy pooling to model periodic motion dynamics. Experiments show that InterEdit improves text-to-motion consistency and edit fidelity, achieving state-of-the-art TMME performance. The dataset and code will be released at https://github.com/YNG916/InterEdit.
$M^2$-Occ: Resilient 3D Semantic Occupancy Prediction for Autonomous Driving with Incomplete Camera Inputs
Mar 10, 2026Semantic occupancy prediction enables dense 3D geometric and semantic understanding for autonomous driving. However, existing camera-based approaches implicitly assume complete surround-view observations, an assumption that rarely holds in real-world deployment due to occlusion, hardware malfunction, or communication failures. We study semantic occupancy prediction under incomplete multi-camera inputs and introduce $M^2$-Occ, a framework designed to preserve geometric structure and semantic coherence when views are missing. $M^2$-Occ addresses two complementary challenges. First, a Multi-view Masked Reconstruction (MMR) module leverages the spatial overlap among neighboring cameras to recover missing-view representations directly in the feature space. Second, a Feature Memory Module (FMM) introduces a learnable memory bank that stores class-level semantic prototypes. By retrieving and integrating these global priors, the FMM refines ambiguous voxel features, ensuring semantic consistency even when observational evidence is incomplete. We introduce a systematic missing-view evaluation protocol on the nuScenes-based SurroundOcc benchmark, encompassing both deterministic single-view failures and stochastic multi-view dropout scenarios. Under the safety-critical missing back-view setting, $M^2$-Occ improves the IoU by 4.93%. As the number of missing cameras increases, the robustness gap further widens; for instance, under the setting with five missing views, our method boosts the IoU by 5.01%. These gains are achieved without compromising full-view performance. The source code will be publicly released at https://github.com/qixi7up/M2-Occ.
SGR3 Model: Scene Graph Retrieval-Reasoning Model in 3D
Mar 04, 20263D scene graphs provide a structured representation of object entities and their relationships, enabling high-level interpretation and reasoning for robots while remaining intuitively understandable to humans. Existing approaches for 3D scene graph generation typically combine scene reconstruction with graph neural networks (GNNs). However, such pipelines require multi-modal data that may not always be available, and their reliance on heuristic graph construction can constrain the prediction of relationship triplets. In this work, we introduce a Scene Graph Retrieval-Reasoning Model in 3D (SGR3 Model), a training-free framework that leverages multi-modal large language models (MLLMs) with retrieval-augmented generation (RAG) for semantic scene graph generation. SGR3 Model bypasses the need for explicit 3D reconstruction. Instead, it enhances relational reasoning by incorporating semantically aligned scene graphs retrieved via a ColPali-style cross-modal framework. To improve retrieval robustness, we further introduce a weighted patch-level similarity selection mechanism that mitigates the negative impact of blurry or semantically uninformative regions. Experiments demonstrate that SGR3 Model achieves competitive performance compared to training-free baselines and on par with GNN-based expert models. Moreover, an ablation study on the retrieval module and knowledge base scale reveals that retrieved external information is explicitly integrated into the token generation process, rather than being implicitly internalized through abstraction.
EReLiFM: Evidential Reliability-Aware Residual Flow Meta-Learning for Open-Set Domain Generalization under Noisy Labels
Oct 14, 2025
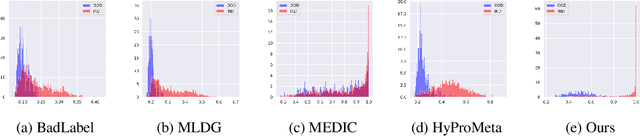


Open-Set Domain Generalization (OSDG) aims to enable deep learning models to recognize unseen categories in new domains, which is crucial for real-world applications. Label noise hinders open-set domain generalization by corrupting source-domain knowledge, making it harder to recognize known classes and reject unseen ones. While existing methods address OSDG under Noisy Labels (OSDG-NL) using hyperbolic prototype-guided meta-learning, they struggle to bridge domain gaps, especially with limited clean labeled data. In this paper, we propose Evidential Reliability-Aware Residual Flow Meta-Learning (EReLiFM). We first introduce an unsupervised two-stage evidential loss clustering method to promote label reliability awareness. Then, we propose a residual flow matching mechanism that models structured domain- and category-conditioned residuals, enabling diverse and uncertainty-aware transfer paths beyond interpolation-based augmentation. During this meta-learning process, the model is optimized such that the update direction on the clean set maximizes the loss decrease on the noisy set, using pseudo labels derived from the most confident predicted class for supervision. Experimental results show that EReLiFM outperforms existing methods on OSDG-NL, achieving state-of-the-art performance. The source code is available at https://github.com/KPeng9510/ERELIFM.
MICA: Multi-Agent Industrial Coordination Assistant
Sep 17, 2025Industrial workflows demand adaptive and trustworthy assistance that can operate under limited computing, connectivity, and strict privacy constraints. In this work, we present MICA (Multi-Agent Industrial Coordination Assistant), a perception-grounded and speech-interactive system that delivers real-time guidance for assembly, troubleshooting, part queries, and maintenance. MICA coordinates five role-specialized language agents, audited by a safety checker, to ensure accurate and compliant support. To achieve robust step understanding, we introduce Adaptive Step Fusion (ASF), which dynamically blends expert reasoning with online adaptation from natural speech feedback. Furthermore, we establish a new multi-agent coordination benchmark across representative task categories and propose evaluation metrics tailored to industrial assistance, enabling systematic comparison of different coordination topologies. Our experiments demonstrate that MICA consistently improves task success, reliability, and responsiveness over baseline structures, while remaining deployable on practical offline hardware. Together, these contributions highlight MICA as a step toward deployable, privacy-preserving multi-agent assistants for dynamic factory environments. The source code will be made publicly available at https://github.com/Kratos-Wen/MICA.
HopaDIFF: Holistic-Partial Aware Fourier Conditioned Diffusion for Referring Human Action Segmentation in Multi-Person Scenarios
Jun 11, 2025Action segmentation is a core challenge in high-level video understanding, aiming to partition untrimmed videos into segments and assign each a label from a predefined action set. Existing methods primarily address single-person activities with fixed action sequences, overlooking multi-person scenarios. In this work, we pioneer textual reference-guided human action segmentation in multi-person settings, where a textual description specifies the target person for segmentation. We introduce the first dataset for Referring Human Action Segmentation, i.e., RHAS133, built from 133 movies and annotated with 137 fine-grained actions with 33h video data, together with textual descriptions for this new task. Benchmarking existing action recognition methods on RHAS133 using VLM-based feature extractors reveals limited performance and poor aggregation of visual cues for the target person. To address this, we propose a holistic-partial aware Fourier-conditioned diffusion framework, i.e., HopaDIFF, leveraging a novel cross-input gate attentional xLSTM to enhance holistic-partial long-range reasoning and a novel Fourier condition to introduce more fine-grained control to improve the action segmentation generation. HopaDIFF achieves state-of-the-art results on RHAS133 in diverse evaluation settings. The code is available at https://github.com/KPeng9510/HopaDIFF.git.
Exploring Video-Based Driver Activity Recognition under Noisy Labels
Apr 16, 2025As an open research topic in the field of deep learning, learning with noisy labels has attracted much attention and grown rapidly over the past ten years. Learning with label noise is crucial for driver distraction behavior recognition, as real-world video data often contains mislabeled samples, impacting model reliability and performance. However, label noise learning is barely explored in the driver activity recognition field. In this paper, we propose the first label noise learning approach for the driver activity recognition task. Based on the cluster assumption, we initially enable the model to learn clustering-friendly low-dimensional representations from given videos and assign the resultant embeddings into clusters. We subsequently perform co-refinement within each cluster to smooth the classifier outputs. Furthermore, we propose a flexible sample selection strategy that combines two selection criteria without relying on any hyperparameters to filter clean samples from the training dataset. We also incorporate a self-adaptive parameter into the sample selection process to enforce balancing across classes. A comprehensive variety of experiments on the public Drive&Act dataset for all granularity levels demonstrates the superior performance of our method in comparison with other label-denoising methods derived from the image classification field. The source code is available at https://github.com/ilonafan/DAR-noisy-labels.
VISO-Grasp: Vision-Language Informed Spatial Object-centric 6-DoF Active View Planning and Grasping in Clutter and Invisibility
Mar 16, 2025We propose VISO-Grasp, a novel vision-language-informed system designed to systematically address visibility constraints for grasping in severely occluded environments. By leveraging Foundation Models (FMs) for spatial reasoning and active view planning, our framework constructs and updates an instance-centric representation of spatial relationships, enhancing grasp success under challenging occlusions. Furthermore, this representation facilitates active Next-Best-View (NBV) planning and optimizes sequential grasping strategies when direct grasping is infeasible. Additionally, we introduce a multi-view uncertainty-driven grasp fusion mechanism that refines grasp confidence and directional uncertainty in real-time, ensuring robust and stable grasp execution. Extensive real-world experiments demonstrate that VISO-Grasp achieves a success rate of $87.5\%$ in target-oriented grasping with the fewest grasp attempts outperforming baselines. To the best of our knowledge, VISO-Grasp is the first unified framework integrating FMs into target-aware active view planning and 6-DoF grasping in environments with severe occlusions and entire invisibility constraints.