 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Induced Outcome Potential: Turn-Level Credit Assignment for Agents without Verifiers
May 06, 2026Long-horizon LLM agents depend on intermediate information-gathering turns, yet training feedback is usually observed only at the final answer, because process-level rewards require high-quality human annotation. Existing turn-level shaping methods reward turns that increase the likelihood of a gold answer, but they require answer supervision or stable task-specific verifiers. Conversely, label-free RL methods extract self-signals from output distributions, but mainly at the answer or trajectory level and therefore cannot assign credit to intermediate turns. We propose Self-Induced Outcome Potential (SIOP), which treats semantic clusters of final answers as latent future outcome states for potential-based turn-level credit assignment. For each query, SIOP samples multiple rollouts, clusters final answers into semantic outcome modes, and builds a reliability-aware target distribution over these states. It then rewards turns for increasing posterior support for reliable future states using a tractable cluster-level approximation. The objective generalizes information-potential shaping from gold-answer supervision to settings without task-specific gold verifiers while avoiding the broadcasted rollout-level advantages used by standard GRPO. We formalize the framework, characterize its supervised gold-answer limit, and show that SIOP improves average performance over verifier-free outcome-level baselines on seven search-augmented agentic reasoning benchmarks while approaching a gold-supervised outcome baseline. Code is available at https://github.com/dl-m9/SIOP.git.
Controllable Reasoning Models Are Private Thinkers
Feb 27, 2026AI agents powered by reasoning models require access to sensitive user data. However, their reasoning traces are difficult to control, which can result in the unintended leakage of private information to external parties. We propose training models to follow instructions not only in the final answer, but also in reasoning traces, potentially under different constraints. We hypothesize that improving their instruction following abilities in the reasoning traces can improve their privacy-preservation skills. To demonstrate this, we fine-tune models on a new instruction-following dataset with explicit restrictions on reasoning traces. We further introduce a generation strategy that decouples reasoning and answer generation using separate LoRA adapters. We evaluate our approach on six models from two model families, ranging from 1.7B to 14B parameters, across two instruction-following benchmarks and two privacy benchmarks. Our method yields substantial improvements, achieving gains of up to 20.9 points in instruction-following performance and up to 51.9 percentage points on privacy benchmarks. These improvements, however, can come at the cost of task utility, due to the trade-off between reasoning performance and instruction-following abilities. Overall, our results show that improving instruction-following behavior in reasoning models can significantly enhance privacy, suggesting a promising direction for the development of future privacy-aware agents. Our code and data are available at https://github.com/UKPLab/arxiv2026-controllable-reasoning-models
DSP-Reg: Domain-Sensitive Parameter Regularization for Robust Domain Generalization
Jan 27, 2026Domain Generalization (DG) is a critical area that focuses on developing models capable of performing well on data from unseen distributions, which is essential for real-world applications. Existing approaches primarily concentrate on learning domain-invariant features, which assume that a model robust to variations in the source domains will generalize well to unseen target domains. However, these approaches neglect a deeper analysis at the parameter level, which makes the model hard to explicitly differentiate between parameters sensitive to domain shifts and those robust, potentially hindering its overall ability to generalize. In order to address these limitations, we first build a covariance-based parameter sensitivity analysis framework to quantify the sensitivity of each parameter in a model to domain shifts. By computing the covariance of parameter gradients across multiple source domains, we can identify parameters that are more susceptible to domain variations, which serves as our theoretical foundation. Based on this, we propose Domain-Sensitive Parameter Regularization (DSP-Reg), a principled framework that guides model optimization by a soft regularization technique that encourages the model to rely more on domain-invariant parameters while suppressing those that are domain-specific. This approach provides a more granular control over the model's learning process, leading to improved robustness and generalization to unseen domains. Extensive experiments on benchmarks, such as PACS, VLCS, OfficeHome, and DomainNet, demonstrate that DSP-Reg outperforms state-of-the-art approaches, achieving an average accuracy of 66.7\% and surpassing all baselines.
Event Extraction in Large Language Model
Dec 22, 2025Large language models (LLMs) and multimodal LLMs are changing event extraction (EE): prompting and generation can often produce structured outputs in zero shot or few shot settings. Yet LLM based pipelines face deployment gaps, including hallucinations under weak constraints, fragile temporal and causal linking over long contexts and across documents, and limited long horizon knowledge management within a bounded context window. We argue that EE should be viewed as a system component that provides a cognitive scaffold for LLM centered solutions. Event schemas and slot constraints create interfaces for grounding and verification; event centric structures act as controlled intermediate representations for stepwise reasoning; event links support relation aware retrieval with graph based RAG; and event stores offer updatable episodic and agent memory beyond the context window. This survey covers EE in text and multimodal settings, organizing tasks and taxonomy, tracing method evolution from rule based and neural models to instruction driven and generative frameworks, and summarizing formulations, decoding strategies, architectures, representations, datasets, and evaluation. We also review cross lingual, low resource, and domain specific settings, and highlight open challenges and future directions for reliable event centric systems. Finally, we outline open challenges and future directions that are central to the LLM era, aiming to evolve EE from static extraction into a structurally reliable, agent ready perception and memory layer for open world systems.
Every Step Evolves: Scaling Reinforcement Learning for Trillion-Scale Thinking Model
Oct 21, 2025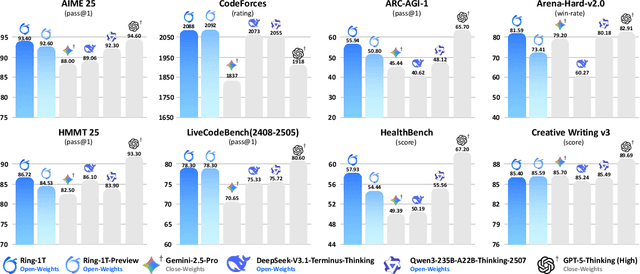
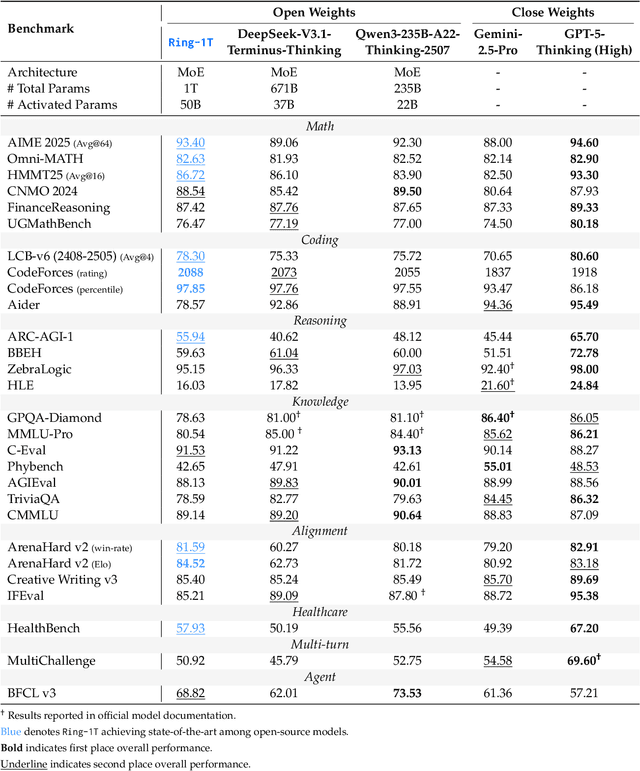
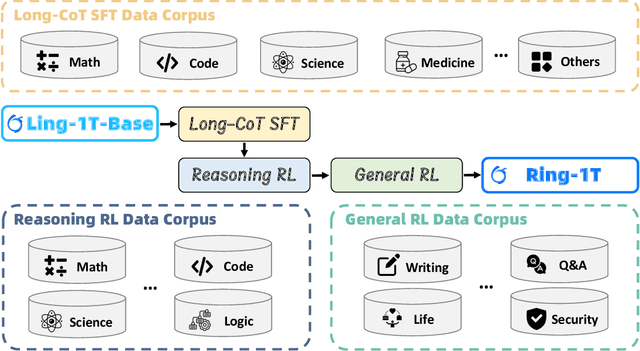
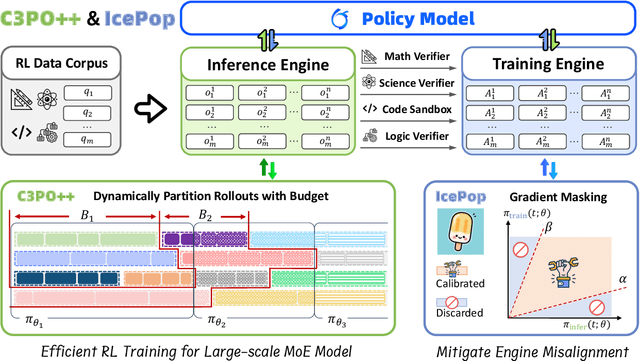
We present Ring-1T, the first open-source, state-of-the-art thinking model with a trillion-scale parameter. It features 1 trillion total parameters and activates approximately 50 billion per token. Training such models at a trillion-parameter scale introduces unprecedented challenges, including train-inference misalignment, inefficiencies in rollout processing, and bottlenecks in the RL system. To address these, we pioneer three interconnected innovations: (1) IcePop stabilizes RL training via token-level discrepancy masking and clipping, resolving instability from training-inference mismatches; (2) C3PO++ improves resource utilization for long rollouts under a token budget by dynamically partitioning them, thereby obtaining high time efficiency; and (3) ASystem, a high-performance RL framework designed to overcome the systemic bottlenecks that impede trillion-parameter model training. Ring-1T delivers breakthrough results across critical benchmarks: 93.4 on AIME-2025, 86.72 on HMMT-2025, 2088 on CodeForces, and 55.94 on ARC-AGI-v1. Notably, it attains a silver medal-level result on the IMO-2025, underscoring its exceptional reasoning capabilities. By releasing the complete 1T parameter MoE model to the community, we provide the research community with direct access to cutting-edge reasoning capabilities. This contribution marks a significant milestone in democratizing large-scale reasoning intelligence and establishes a new baseline for open-source model performance.
Distribution-Aligned Decoding for Efficient LLM Task Adaptation
Sep 19, 2025Adapting billion-parameter language models to a downstream task is still costly, even with parameter-efficient fine-tuning (PEFT). We re-cast task adaptation as output-distribution alignment: the objective is to steer the output distribution toward the task distribution directly during decoding rather than indirectly through weight updates. Building on this view, we introduce Steering Vector Decoding (SVD), a lightweight, PEFT-compatible, and theoretically grounded method. We start with a short warm-start fine-tune and extract a task-aware steering vector from the Kullback-Leibler (KL) divergence gradient between the output distribution of the warm-started and pre-trained models. This steering vector is then used to guide the decoding process to steer the model's output distribution towards the task distribution. We theoretically prove that SVD is first-order equivalent to the gradient step of full fine-tuning and derive a globally optimal solution for the strength of the steering vector. Across three tasks and nine benchmarks, SVD paired with four standard PEFT methods improves multiple-choice accuracy by up to 5 points and open-ended truthfulness by 2 points, with similar gains (1-2 points) on commonsense datasets without adding trainable parameters beyond the PEFT adapter. SVD thus offers a lightweight, theoretically grounded path to stronger task adaptation for large language models.
K2-Think: A Parameter-Efficient Reasoning System
Sep 09, 2025K2-Think is a reasoning system that achieves state-of-the-art performance with a 32B parameter model, matching or surpassing much larger models like GPT-OSS 120B and DeepSeek v3.1. Built on the Qwen2.5 base model, our system shows that smaller models can compete at the highest levels by combining advanced post-training and test-time computation techniques. The approach is based on six key technical pillars: Long Chain-of-thought Supervised Finetuning, Reinforcement Learning with Verifiable Rewards (RLVR), Agentic planning prior to reasoning, Test-time Scaling, Speculative Decoding, and Inference-optimized Hardware, all using publicly available open-source datasets. K2-Think excels in mathematical reasoning, achieving state-of-the-art scores on public benchmarks for open-source models, while also performing strongly in other areas such as Code and Science. Our results confirm that a more parameter-efficient model like K2-Think 32B can compete with state-of-the-art systems through an integrated post-training recipe that includes long chain-of-thought training and strategic inference-time enhancements, making open-source reasoning systems more accessible and affordable. K2-Think is freely available at k2think.ai, offering best-in-class inference speeds of over 2,000 tokens per second per request via the Cerebras Wafer-Scale Engine.
Towards Alignment-Centric Paradigm: A Survey of Instruction Tuning in Large Language Models
Aug 24, 2025



Instruction tuning is a pivotal technique for aligning large language models (LLMs) with human intentions, safety constraints, and domain-specific requirements. This survey provides a comprehensive overview of the full pipeline, encompassing (i) data collection methodologies, (ii) full-parameter and parameter-efficient fine-tuning strategies, and (iii) evaluation protocols. We categorized data construction into three major paradigms: expert annotation, distillation from larger models, and self-improvement mechanisms, each offering distinct trade-offs between quality, scalability, and resource cost. Fine-tuning techniques range from conventional supervised training to lightweight approaches, such as low-rank adaptation (LoRA) and prefix tuning, with a focus on computational efficiency and model reusability. We further examine the challenges of evaluating faithfulness, utility, and safety across multilingual and multimodal scenarios, highlighting the emergence of domain-specific benchmarks in healthcare, legal, and financial applications. Finally, we discuss promising directions for automated data generation, adaptive optimization, and robust evaluation frameworks, arguing that a closer integration of data, algorithms, and human feedback is essential for advancing instruction-tuned LLMs. This survey aims to serve as a practical reference for researchers and practitioners seeking to design LLMs that are both effective and reliably aligned with human intentions.
GRASPTrack: Geometry-Reasoned Association via Segmentation and Projection for Multi-Object Tracking
Aug 11, 2025Multi-object tracking (MOT) in monocular videos is fundamentally challenged by occlusions and depth ambiguity, issues that conventional tracking-by-detection (TBD) methods struggle to resolve owing to a lack of geometric awareness. To address these limitations, we introduce GRASPTrack, a novel depth-aware MOT framework that integrates monocular depth estimation and instance segmentation into a standard TBD pipeline to generate high-fidelity 3D point clouds from 2D detections, thereby enabling explicit 3D geometric reasoning. These 3D point clouds are then voxelized to enable a precise and robust Voxel-Based 3D Intersection-over-Union (IoU) for spatial association. To further enhance tracking robustness, our approach incorporates Depth-aware Adaptive Noise Compensation, which dynamically adjusts the Kalman filter process noise based on occlusion severity for more reliable state estimation. Additionally, we propose a Depth-enhanced Observation-Centric Momentum, which extends the motion direction consistency from the image plane into 3D space to improve motion-based association cues, particularly for objects with complex trajectories. Extensive experiments on the MOT17, MOT20, and DanceTrack benchmarks demonstrate that our method achieves competitive performance, significantly improving tracking robustness in complex scenes with frequent occlusions and intricate motion patterns.
Learning to Align, Aligning to Learn: A Unified Approach for Self-Optimized Alignment
Aug 11, 2025



Alignment methodologies have emerged as a critical pathway for enhancing language model alignment capabilities. While SFT (supervised fine-tuning) accelerates convergence through direct token-level loss intervention, its efficacy is constrained by offline policy trajectory. In contrast, RL(reinforcement learning) facilitates exploratory policy optimization, but suffers from low sample efficiency and stringent dependency on high-quality base models. To address these dual challenges, we propose GRAO (Group Relative Alignment Optimization), a unified framework that synergizes the respective strengths of SFT and RL through three key innovations: 1) A multi-sample generation strategy enabling comparative quality assessment via reward feedback; 2) A novel Group Direct Alignment Loss formulation leveraging intra-group relative advantage weighting; 3) Reference-aware parameter updates guided by pairwise preference dynamics. Our theoretical analysis establishes GRAO's convergence guarantees and sample efficiency advantages over conventional approaches. Comprehensive evaluations across complex human alignment tasks demonstrate GRAO's superior performance, achieving 57.70\%,17.65\% 7.95\% and 5.18\% relative improvements over SFT, DPO, PPO and GRPO baselines respectively. This work provides both a theoretically grounded alignment framework and empirical evidence for efficient capability evolution in language models.