 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTraffic-Rule-Compliant Trajectory Repair via Satisfiability Modulo Theories and Reachability Analysis
Dec 20, 2024



Complying with traffic rules is challenging for automated vehicles, as numerous rules need to be considered simultaneously. If a planned trajectory violates traffic rules, it is common to replan a new trajectory from scratch. We instead propose a trajectory repair technique to save computation time. By coupling satisfiability modulo theories with set-based reachability analysis, we determine if and in what manner the initial trajectory can be repaired. Experiments in high-fidelity simulators and in the real world demonstrate the benefits of our proposed approach in various scenarios. Even in complex environments with intricate rules, we efficiently and reliably repair rule-violating trajectories, enabling automated vehicles to swiftly resume legally safe operation in real-time.
DrPlanner: Diagnosis and Repair of Motion Planners Using Large Language Models
Mar 12, 2024



Motion planners are essential for the safe operation of automated vehicles across various scenarios. However, no motion planning algorithm has achieved perfection in the literature, and improving its performance is often time-consuming and labor-intensive. To tackle the aforementioned issues, we present DrPlanner, the first framework designed to automatically diagnose and repair motion planners using large language models. Initially, we generate a structured description of the planner and its planned trajectories from both natural and programming languages. Leveraging the profound capabilities of large language models in addressing reasoning challenges, our framework returns repaired planners with detailed diagnostic descriptions. Furthermore, the framework advances iteratively with continuous feedback from the evaluation of the repaired outcomes. Our approach is validated using search-based motion planners; experimental results highlight the need of demonstrations in the prompt and the ability of our framework in identifying and rectifying elusive issues effectively.
Automatic Traffic Scenario Conversion from OpenSCENARIO to CommonRoad
May 17, 2023



Scenarios are a crucial element for developing, testing, and verifying autonomous driving systems. However, open-source scenarios are often formulated using different terminologies. This limits their usage across different applications as many scenario representation formats are not directly compatible with each other. To address this problem, we present the first open-source converter from the OpenSCENARIO format to the CommonRoad format, which are two of the most popular scenario formats used in autonomous driving. Our converter employs a simulation tool to execute the dynamic elements defined by OpenSCENARIO. The converter is available at commonroad.in.tum.de and we demonstrate its usefulness by converting publicly available scenarios in the OpenSCENARIO format and evaluating them using CommonRoad tools.
Model Predictive Robustness of Signal Temporal Logic Predicates
Sep 16, 2022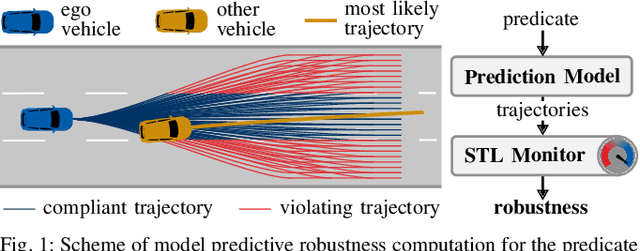
The robustness of signal temporal logic not only assesses whether a signal adheres to a specification but also provides a measure of how much a formula is fulfilled or violated. The calculation of robustness is based on evaluating the robustness of underlying predicates. However, the robustness of predicates is usually defined in a model-free way, i.e., without including the system dynamics. Moreover, it is often nontrivial to define the robustness of complicated predicates precisely. To address these issues, we propose a notion of model predictive robustness, which provides a more systematic way of evaluating robustness compared to previous approaches by considering model-based predictions. In particular, we use Gaussian process regression to learn the robustness based on precomputed predictions so that robustness values can be efficiently computed online. We evaluate our approach for the use case of autonomous driving with predicates used in formalized traffic rules on a recorded dataset, which highlights the advantage of our approach compared to traditional approaches in terms of expressiveness. By incorporating our robustness definitions into a trajectory planner, autonomous vehicles obey traffic rules more robustly than human drivers in the dataset.