 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGradually Compacting Large Language Models for Reasoning Like a Boiling Frog
Feb 04, 2026Large Language Models (LLMs) have demonstrated impressive reasoning capabilities, but their substantial size often demands significant computational resources. To reduce resource consumption and accelerate inference, it is essential to eliminate redundant parameters without compromising performance. However, conventional pruning methods that directly remove such parameters often lead to a dramatic drop in model performance in reasoning tasks, and require extensive post-training to recover the lost capabilities. In this work, we propose a gradual compacting method that divides the compression process into multiple fine-grained iterations, applying a Prune-Tune Loop (PTL) at each stage to incrementally reduce model size while restoring performance with finetuning. This iterative approach-reminiscent of the "boiling frog" effect-enables the model to be progressively compressed without abrupt performance loss. Experimental results show that PTL can compress LLMs to nearly half their original size with only lightweight post-training, while maintaining performance comparable to the original model on reasoning tasks. Moreover, PTL is flexible and can be applied to various pruning strategies, such as neuron pruning and layer pruning, as well as different post-training methods, including continual pre-training and reinforcement learning. Additionally, experimental results confirm the effectiveness of PTL on a variety of tasks beyond mathematical reasoning, such as code generation, demonstrating its broad applicability.
RGBT-Ground Benchmark: Visual Grounding Beyond RGB in Complex Real-World Scenarios
Dec 31, 2025Visual Grounding (VG) aims to localize specific objects in an image according to natural language expressions, serving as a fundamental task in vision-language understanding. However, existing VG benchmarks are mostly derived from datasets collected under clean environments, such as COCO, where scene diversity is limited. Consequently, they fail to reflect the complexity of real-world conditions, such as changes in illumination, weather, etc., that are critical to evaluating model robustness and generalization in safety-critical applications. To address these limitations, we present RGBT-Ground, the first large-scale visual grounding benchmark built for complex real-world scenarios. It consists of spatially aligned RGB and Thermal infrared (TIR) image pairs with high-quality referring expressions, corresponding object bounding boxes, and fine-grained annotations at the scene, environment, and object levels. This benchmark enables comprehensive evaluation and facilitates the study of robust grounding under diverse and challenging conditions. Furthermore, we establish a unified visual grounding framework that supports both uni-modal (RGB or TIR) and multi-modal (RGB-TIR) visual inputs. Based on it, we propose RGBT-VGNet, a simple yet effective baseline for fusing complementary visual modalities to achieve robust grounding. We conduct extensive adaptations to the existing methods on RGBT-Ground. Experimental results show that our proposed RGBT-VGNet significantly outperforms these adapted methods, particularly in nighttime and long-distance scenarios. All resources will be publicly released to promote future research on robust visual grounding in complex real-world environments.
Moirai 2.0: When Less Is More for Time Series Forecasting
Nov 12, 2025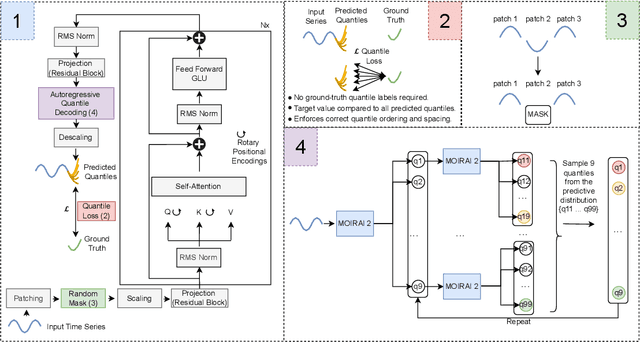
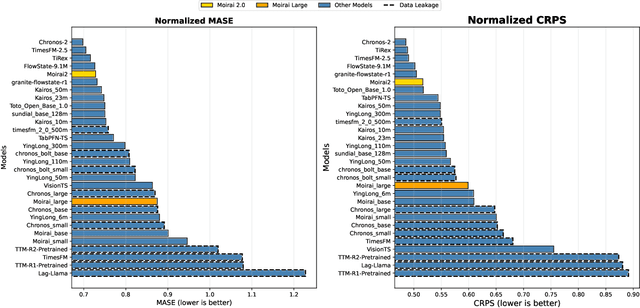

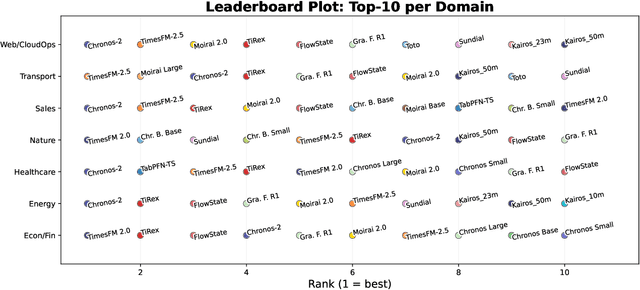
We introduce Moirai 2.0, a decoder-only time-series foundation model trained on a new corpus of 36M series. The model adopts quantile forecasting and multi-token prediction, improving both probabilistic accuracy and inference efficiency. On the Gift-Eval benchmark, it ranks among the top pretrained models while achieving a strong trade-off between accuracy, speed, and model size. Compared to Moirai 1.0, Moirai 2.0 replaces masked-encoder training, multi-patch inputs, and mixture-distribution outputs with a simpler decoder-only architecture, single patch, and quantile loss. Ablation studies isolate these changes -- showing that the decoder-only backbone along with recursive multi-quantile decoding contribute most to the gains. Additional experiments show that Moirai 2.0 outperforms larger models from the same family and exhibits robust domain-level results. In terms of efficiency and model size, Moirai 2.0 is twice as fast and thirty times smaller than its prior best version, Moirai 1.0-Large, while also performing better. Model performance plateaus with increasing parameter count and declines at longer horizons, motivating future work on data scaling and long-horizon modeling. We release code and evaluation details to support further research.
WALT: Web Agents that Learn Tools
Oct 01, 2025Web agents promise to automate complex browser tasks, but current methods remain brittle -- relying on step-by-step UI interactions and heavy LLM reasoning that break under dynamic layouts and long horizons. Humans, by contrast, exploit website-provided functionality through high-level operations like search, filter, and sort. We introduce WALT (Web Agents that Learn Tools), a framework that reverse-engineers latent website functionality into reusable invocable tools. Rather than hypothesizing ad-hoc skills, WALT exposes robust implementations of automations already designed into websites -- spanning discovery (search, filter, sort), communication (post, comment, upvote), and content management (create, edit, delete). Tools abstract away low-level execution: instead of reasoning about how to click and type, agents simply call search(query) or create(listing). This shifts the computational burden from fragile step-by-step reasoning to reliable tool invocation. On VisualWebArena and WebArena, WALT achieves higher success with fewer steps and less LLM-dependent reasoning, establishing a robust and generalizable paradigm for browser automation.
MCP-Universe: Benchmarking Large Language Models with Real-World Model Context Protocol Servers
Aug 20, 2025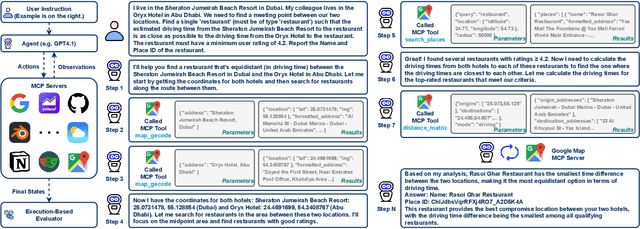
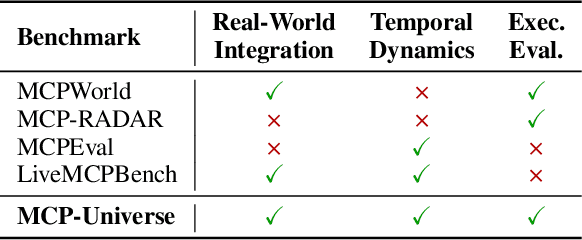
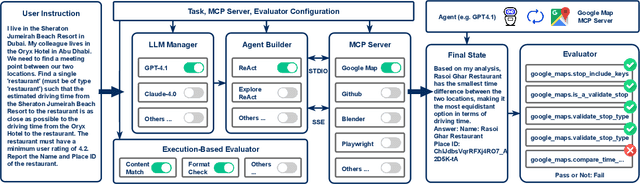
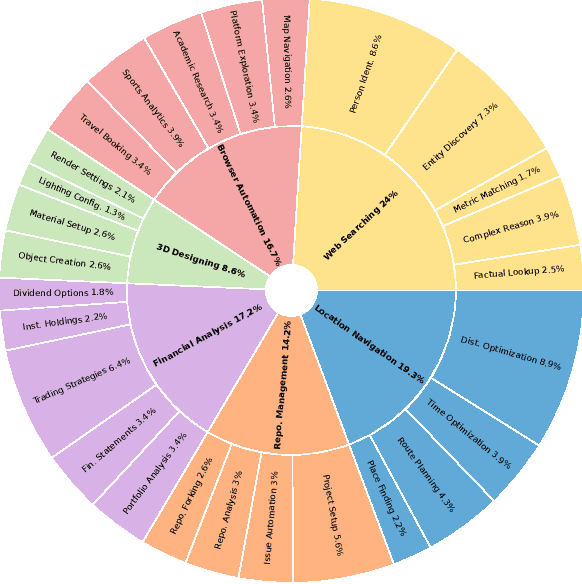
The Model Context Protocol has emerged as a transformative standard for connecting large language models to external data sources and tools, rapidly gaining adoption across major AI providers and development platforms. However, existing benchmarks are overly simplistic and fail to capture real application challenges such as long-horizon reasoning and large, unfamiliar tool spaces. To address this critical gap, we introduce MCP-Universe, the first comprehensive benchmark specifically designed to evaluate LLMs in realistic and hard tasks through interaction with real-world MCP servers. Our benchmark encompasses 6 core domains spanning 11 different MCP servers: Location Navigation, Repository Management, Financial Analysis, 3D Design, Browser Automation, and Web Searching. To ensure rigorous evaluation, we implement execution-based evaluators, including format evaluators for agent format compliance, static evaluators for time-invariant content matching, and dynamic evaluators that automatically retrieve real-time ground truth for temporally sensitive tasks. Through extensive evaluation of leading LLMs, we find that even SOTA models such as GPT-5 (43.72%), Grok-4 (33.33%) and Claude-4.0-Sonnet (29.44%) exhibit significant performance limitations. In addition, our benchmark poses a significant long-context challenge for LLM agents, as the number of input tokens increases rapidly with the number of interaction steps. Moreover, it introduces an unknown-tools challenge, as LLM agents often lack familiarity with the precise usage of the MCP servers. Notably, enterprise-level agents like Cursor cannot achieve better performance than standard ReAct frameworks. Beyond evaluation, we open-source our extensible evaluation framework with UI support, enabling researchers and practitioners to seamlessly integrate new agents and MCP servers while fostering innovation in the rapidly evolving MCP ecosystem.
CoAct-1: Computer-using Agents with Coding as Actions
Aug 05, 2025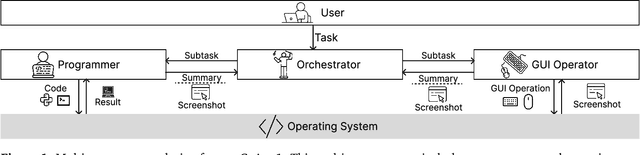
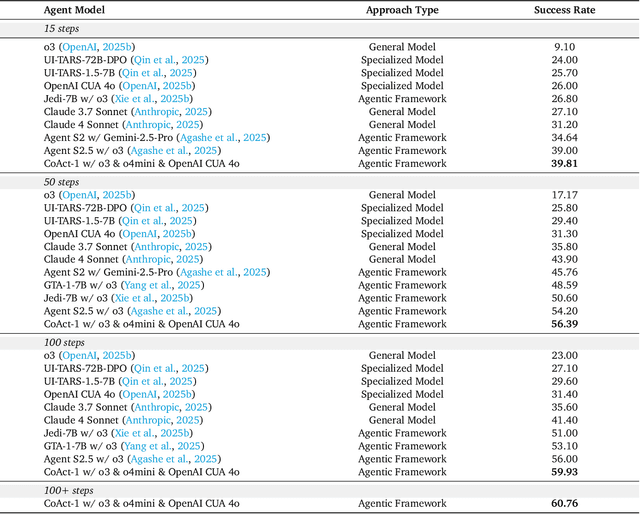
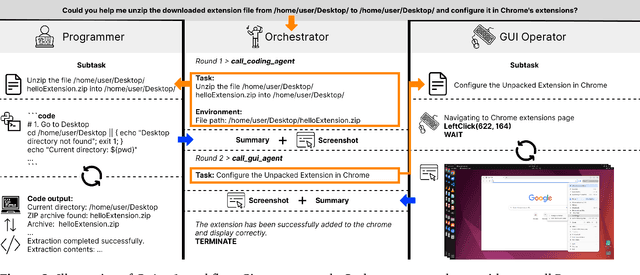

Autonomous agents that operate computers via Graphical User Interfaces (GUIs) often struggle with efficiency and reliability on complex, long-horizon tasks. While augmenting these agents with planners can improve task decomposition, they remain constrained by the inherent limitations of performing all actions through GUI manipulation, leading to brittleness and inefficiency. In this work, we introduce a more robust and flexible paradigm: enabling agents to use coding as a enhanced action. We present CoAct-1, a novel multi-agent system that synergistically combines GUI-based control with direct programmatic execution. CoAct-1 features an Orchestrator that dynamically delegates subtasks to either a conventional GUI Operator or a specialized Programmer agent, which can write and execute Python or Bash scripts. This hybrid approach allows the agent to bypass inefficient GUI action sequences for tasks like file management and data processing, while still leveraging visual interaction when necessary. We evaluate our system on the challenging OSWorld benchmark, where CoAct-1 achieves a new state-of-the-art success rate of 60.76%, significantly outperforming prior methods. Furthermore, our approach dramatically improves efficiency, reducing the average number of steps required to complete a task to just 10.15, compared to 15 for leading GUI agents. Our results demonstrate that integrating coding as a core action provides a more powerful, efficient, and scalable path toward generalized computer automation.
The Emergence of Abstract Thought in Large Language Models Beyond Any Language
Jun 11, 2025As large language models (LLMs) continue to advance, their capacity to function effectively across a diverse range of languages has shown marked improvement. Preliminary studies observe that the hidden activations of LLMs often resemble English, even when responding to non-English prompts. This has led to the widespread assumption that LLMs may "think" in English. However, more recent results showing strong multilingual performance, even surpassing English performance on specific tasks in other languages, challenge this view. In this work, we find that LLMs progressively develop a core language-agnostic parameter space-a remarkably small subset of parameters whose deactivation results in significant performance degradation across all languages. This compact yet critical set of parameters underlies the model's ability to generalize beyond individual languages, supporting the emergence of abstract thought that is not tied to any specific linguistic system. Specifically, we identify language-related neurons-those are consistently activated during the processing of particular languages, and categorize them as either shared (active across multiple languages) or exclusive (specific to one). As LLMs undergo continued development over time, we observe a marked increase in both the proportion and functional importance of shared neurons, while exclusive neurons progressively diminish in influence. These shared neurons constitute the backbone of the core language-agnostic parameter space, supporting the emergence of abstract thought. Motivated by these insights, we propose neuron-specific training strategies tailored to LLMs' language-agnostic levels at different development stages. Experiments across diverse LLM families support our approach.
Fractured Chain-of-Thought Reasoning
May 19, 2025Inference-time scaling techniques have significantly bolstered the reasoning capabilities of large language models (LLMs) by harnessing additional computational effort at inference without retraining. Similarly, Chain-of-Thought (CoT) prompting and its extension, Long CoT, improve accuracy by generating rich intermediate reasoning trajectories, but these approaches incur substantial token costs that impede their deployment in latency-sensitive settings. In this work, we first show that truncated CoT, which stops reasoning before completion and directly generates the final answer, often matches full CoT sampling while using dramatically fewer tokens. Building on this insight, we introduce Fractured Sampling, a unified inference-time strategy that interpolates between full CoT and solution-only sampling along three orthogonal axes: (1) the number of reasoning trajectories, (2) the number of final solutions per trajectory, and (3) the depth at which reasoning traces are truncated. Through extensive experiments on five diverse reasoning benchmarks and several model scales, we demonstrate that Fractured Sampling consistently achieves superior accuracy-cost trade-offs, yielding steep log-linear scaling gains in Pass@k versus token budget. Our analysis reveals how to allocate computation across these dimensions to maximize performance, paving the way for more efficient and scalable LLM reasoning.
Beyond 'Aha!': Toward Systematic Meta-Abilities Alignment in Large Reasoning Models
May 15, 2025Large reasoning models (LRMs) already possess a latent capacity for long chain-of-thought reasoning. Prior work has shown that outcome-based reinforcement learning (RL) can incidentally elicit advanced reasoning behaviors such as self-correction, backtracking, and verification phenomena often referred to as the model's "aha moment". However, the timing and consistency of these emergent behaviors remain unpredictable and uncontrollable, limiting the scalability and reliability of LRMs' reasoning capabilities. To address these limitations, we move beyond reliance on prompts and coincidental "aha moments". Instead, we explicitly align models with three meta-abilities: deduction, induction, and abduction, using automatically generated, self-verifiable tasks. Our three stage-pipeline individual alignment, parameter-space merging, and domain-specific reinforcement learning, boosting performance by over 10\% relative to instruction-tuned baselines. Furthermore, domain-specific RL from the aligned checkpoint yields an additional 2\% average gain in the performance ceiling across math, coding, and science benchmarks, demonstrating that explicit meta-ability alignment offers a scalable and dependable foundation for reasoning. Code is available at: https://github.com/zhiyuanhubj/Meta-Ability-Alignment
Scalable Chain of Thoughts via Elastic Reasoning
May 08, 2025Large reasoning models (LRMs) have achieved remarkable progress on complex tasks by generating extended chains of thought (CoT). However, their uncontrolled output lengths pose significant challenges for real-world deployment, where inference-time budgets on tokens, latency, or compute are strictly constrained. We propose Elastic Reasoning, a novel framework for scalable chain of thoughts that explicitly separates reasoning into two phases--thinking and solution--with independently allocated budgets. At test time, Elastic Reasoning prioritize that completeness of solution segments, significantly improving reliability under tight resource constraints. To train models that are robust to truncated thinking, we introduce a lightweight budget-constrained rollout strategy, integrated into GRPO, which teaches the model to reason adaptively when the thinking process is cut short and generalizes effectively to unseen budget constraints without additional training. Empirical results on mathematical (AIME, MATH500) and programming (LiveCodeBench, Codeforces) benchmarks demonstrate that Elastic Reasoning performs robustly under strict budget constraints, while incurring significantly lower training cost than baseline methods. Remarkably, our approach also produces more concise and efficient reasoning even in unconstrained settings. Elastic Reasoning offers a principled and practical solution to the pressing challenge of controllable reasoning at scale.