 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAccelerating Discovery in Natural Science Laboratories with AI and Robotics: Perspectives and Challenges from the 2024 IEEE ICRA Workshop, Yokohama, Japan
Jan 12, 2025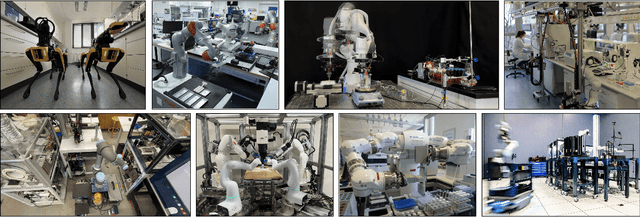
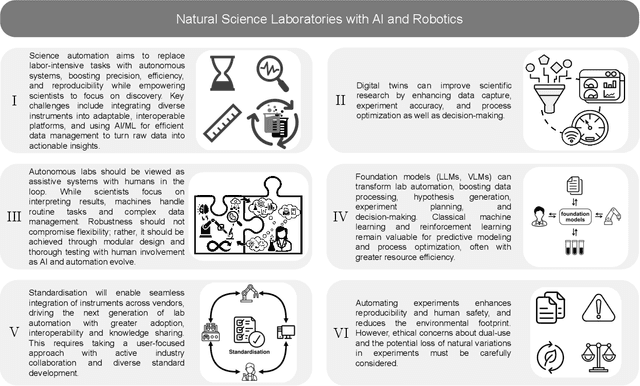
Science laboratory automation enables accelerated discovery in life sciences and materials. However, it requires interdisciplinary collaboration to address challenges such as robust and flexible autonomy, reproducibility, throughput, standardization, the role of human scientists, and ethics. This article highlights these issues, reflecting perspectives from leading experts in laboratory automation across different disciplines of the natural sciences.
Towards Connecting Control to Perception: High-Performance Whole-Body Collision Avoidance Using Control-Compatible Obstacles
Sep 13, 2023One of the most important aspects of autonomous systems is safety. This includes ensuring safe human-robot and safe robot-environment interaction when autonomously performing complex tasks or in collaborative scenarios. Although several methods have been introduced to tackle this, most are unsuitable for real-time applications and require carefully hand-crafted obstacle descriptions. In this work, we propose a method combining high-frequency and real-time self and environment collision avoidance of a robotic manipulator with low-frequency, multimodal, and high-resolution environmental perceptions accumulated in a digital twin system. Our method is based on geometric primitives, so-called primitive skeletons. These, in turn, are information-compressed and real-time compatible digital representations of the robot's body and environment, automatically generated from ultra-realistic virtual replicas of the real world provided by the digital twin. Our approach is a key enabler for closing the loop between environment perception and robot control by providing the millisecond real-time control stage with a current and accurate world description, empowering it to react to environmental changes. We evaluate our whole-body collision avoidance on a 9-DOFs robot system through five experiments, demonstrating the functionality and efficiency of our framework.
Dual-Material 3D-Printed PaCoMe-Like Fingers for Flexible Biolaboratory Automation
Feb 07, 2023Robotic automation in life science research is a paradigm that has gained increasing relevance in recent years. Current solutions in this area often have limited scope, such as pick-and-place tasks for a specific object. Thus, each new process requires a separate toolset, which prevents the realization of more complex workflows and reduces the acceptance of robotic automation tools. Here, we present a novel finger system for a parallel gripper for biolaboratory automation that can handle a wide range of liquid containers. This flexibility is enabled by developing the fingers as a dual-extrusion 3D print. The coating with a soft material from the second extruder in one seamless print and the fingertip design are key features to enhance grasping capabilities. By employing a passive compliant mechanism that was previously presented in a finger called ``PaCoMe'', a simple actuation system and a low weight are maintained. The ability to resist chemicals and high temperatures and the integration with a tool exchange system make the fingers usable for daily laboratory use and complex workflows. We present their task suitability in several experiments showing the wide range of vessels that can be handled as well as their tolerance against displacements and grasp stability.