 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Execution Horizon Prediction for Chunk-based Robot Policies
Jun 09, 2026Action chunking has become a standard design in modern robot policies, from diffusion/flow policies to vision-language-action models, where the policy predicts a sequence of actions and executes a fixed number of them instead of acting one step at a time. However, this paradigm relies on a key assumption: a fixed execution horizon. During chunk execution, the policy operates open-loop, which is particularly problematic for fine-grained manipulation tasks that require frequent replanning. In practice, the execution horizon is typically chosen through empirical tuning and is highly task-dependent. To this end, we propose Dynamic Execution Horizon Prediction (DEHP), an effective method that trains a lightweight execution-horizon prediction branch using online reinforcement learning while keeping the pretrained chunk policy completely frozen. This makes the method compatible with black-box chunk policies and isolates the effect of adapting the execution horizon from changes to the underlying action generator. Across our evaluations, DEHP improves the success rate of different high-precision and long-horizon manipulation tasks by a large margin. Our qualitative analysis further shows that DEHP predicts shorter execution horizons during fine-grained stages of the task and longer horizons during free-space motion. In this way, DEHP balances the efficiency of open-loop chunk execution with the reactivity of closed-loop single-step control. Project page: https://dehp-chunking.github.io/
MATTERIX: toward a digital twin for robotics-assisted chemistry laboratory automation
Jan 19, 2026Accelerated materials discovery is critical for addressing global challenges. However, developing new laboratory workflows relies heavily on real-world experimental trials, and this can hinder scalability because of the need for numerous physical make-and-test iterations. Here we present MATTERIX, a multiscale, graphics processing unit-accelerated robotic simulation framework designed to create high-fidelity digital twins of chemistry laboratories, thus accelerating workflow development. This multiscale digital twin simulates robotic physical manipulation, powder and liquid dynamics, device functionalities, heat transfer and basic chemical reaction kinetics. This is enabled by integrating realistic physics simulation and photorealistic rendering with a modular graphics processing unit-accelerated semantics engine, which models logical states and continuous behaviors to simulate chemistry workflows across different levels of abstraction. MATTERIX streamlines the creation of digital twin environments through open-source asset libraries and interfaces, while enabling flexible workflow design via hierarchical plan definition and a modular skill library that incorporates learning-based methods. Our approach demonstrates sim-to-real transfer in robotic chemistry setups, reducing reliance on costly real-world experiments and enabling the testing of hypothetical automated workflows in silico. The project website is available at https://accelerationconsortium.github.io/Matterix/ .
RoboCulture: A Robotics Platform for Automated Biological Experimentation
May 20, 2025Automating biological experimentation remains challenging due to the need for millimeter-scale precision, long and multi-step experiments, and the dynamic nature of living systems. Current liquid handlers only partially automate workflows, requiring human intervention for plate loading, tip replacement, and calibration. Industrial solutions offer more automation but are costly and lack the flexibility needed in research settings. Meanwhile, research in autonomous robotics has yet to bridge the gap for long-duration, failure-sensitive biological experiments. We introduce RoboCulture, a cost-effective and flexible platform that uses a general-purpose robotic manipulator to automate key biological tasks. RoboCulture performs liquid handling, interacts with lab equipment, and leverages computer vision for real-time decisions using optical density-based growth monitoring. We demonstrate a fully autonomous 15-hour yeast culture experiment where RoboCulture uses vision and force feedback and a modular behavior tree framework to robustly execute, monitor, and manage experiments.
AnyPlace: Learning Generalized Object Placement for Robot Manipulation
Feb 06, 2025Object placement in robotic tasks is inherently challenging due to the diversity of object geometries and placement configurations. To address this, we propose AnyPlace, a two-stage method trained entirely on synthetic data, capable of predicting a wide range of feasible placement poses for real-world tasks. Our key insight is that by leveraging a Vision-Language Model (VLM) to identify rough placement locations, we focus only on the relevant regions for local placement, which enables us to train the low-level placement-pose-prediction model to capture diverse placements efficiently. For training, we generate a fully synthetic dataset of randomly generated objects in different placement configurations (insertion, stacking, hanging) and train local placement-prediction models. We conduct extensive evaluations in simulation, demonstrating that our method outperforms baselines in terms of success rate, coverage of possible placement modes, and precision. In real-world experiments, we show how our approach directly transfers models trained purely on synthetic data to the real world, where it successfully performs placements in scenarios where other models struggle -- such as with varying object geometries, diverse placement modes, and achieving high precision for fine placement. More at: https://any-place.github.io.
Accelerating Discovery in Natural Science Laboratories with AI and Robotics: Perspectives and Challenges from the 2024 IEEE ICRA Workshop, Yokohama, Japan
Jan 12, 2025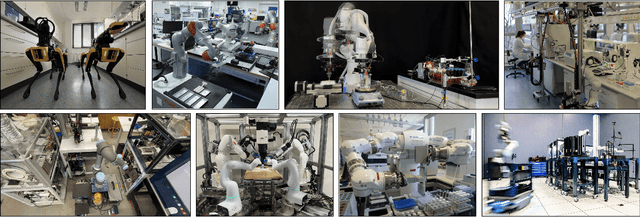
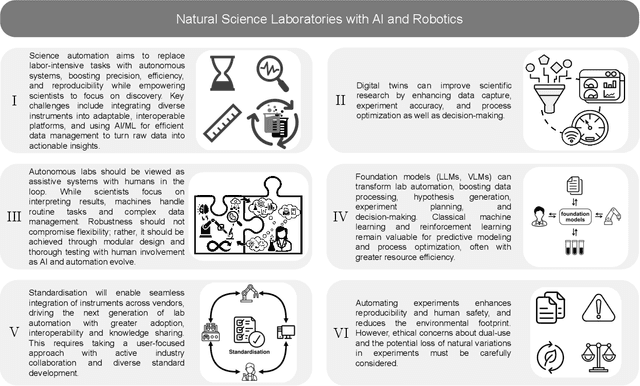
Science laboratory automation enables accelerated discovery in life sciences and materials. However, it requires interdisciplinary collaboration to address challenges such as robust and flexible autonomy, reproducibility, throughput, standardization, the role of human scientists, and ethics. This article highlights these issues, reflecting perspectives from leading experts in laboratory automation across different disciplines of the natural sciences.
ORGANA: A Robotic Assistant for Automated Chemistry Experimentation and Characterization
Jan 13, 2024



Chemistry experimentation is often resource- and labor-intensive. Despite the many benefits incurred by the integration of advanced and special-purpose lab equipment, many aspects of experimentation are still manually conducted by chemists, for example, polishing an electrode in electrochemistry experiments. Traditional lab automation infrastructure faces challenges when it comes to flexibly adapting to new chemistry experiments. To address this issue, we propose a human-friendly and flexible robotic system, ORGANA, that automates a diverse set of chemistry experiments. It is capable of interacting with chemists in the lab through natural language, using Large Language Models (LLMs). ORGANA keeps scientists informed by providing timely reports that incorporate statistical analyses. Additionally, it actively engages with users when necessary for disambiguation or troubleshooting. ORGANA can reason over user input to derive experiment goals, and plan long sequences of both high-level tasks and low-level robot actions while using feedback from the visual perception of the environment. It also supports scheduling and parallel execution for experiments that require resource allocation and coordination between multiple robots and experiment stations. We show that ORGANA successfully conducts a diverse set of chemistry experiments, including solubility assessment, pH measurement, recrystallization, and electrochemistry experiments. For the latter, we show that ORGANA robustly executes a long-horizon plan, comprising 19 steps executed in parallel, to characterize the electrochemical properties of quinone derivatives, a class of molecules used in rechargeable flow batteries. Our user study indicates that ORGANA significantly improves many aspects of user experience while reducing their physical workload. More details about ORGANA can be found at https://ac-rad.github.io/organa/.
RePLan: Robotic Replanning with Perception and Language Models
Jan 08, 2024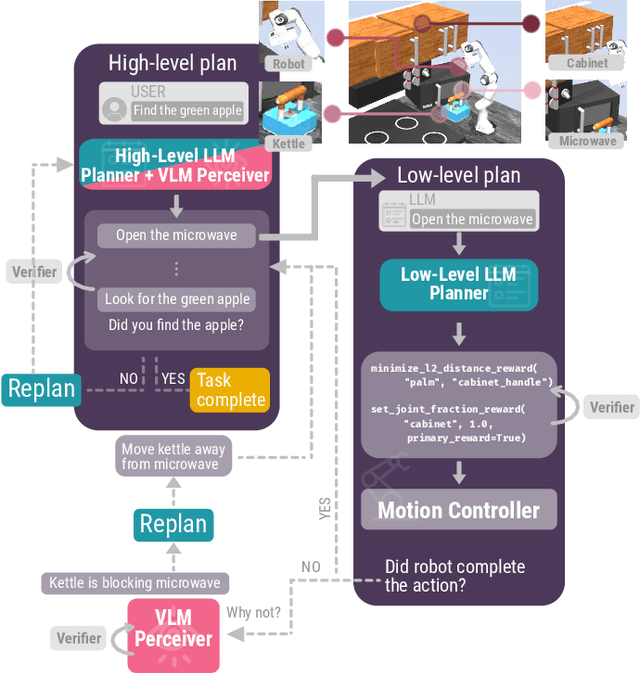
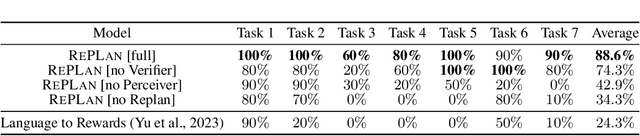
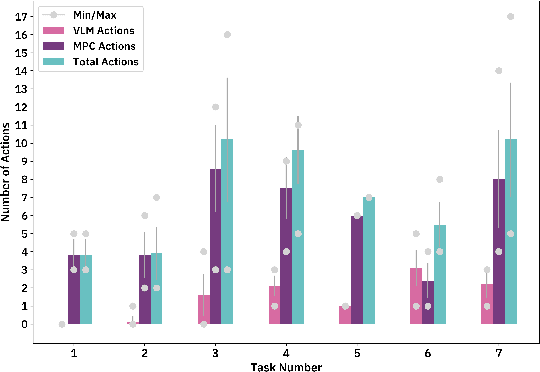
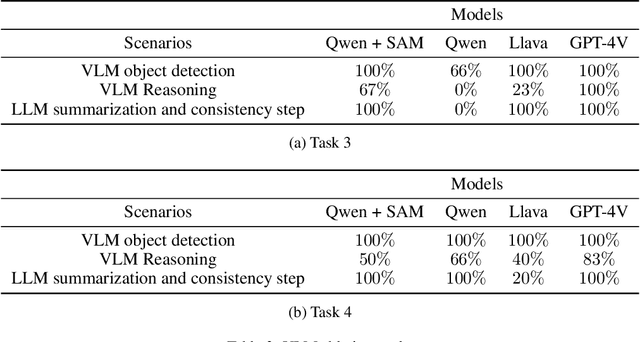
Advancements in large language models (LLMs) have demonstrated their potential in facilitating high-level reasoning, logical reasoning and robotics planning. Recently, LLMs have also been able to generate reward functions for low-level robot actions, effectively bridging the interface between high-level planning and low-level robot control. However, the challenge remains that even with syntactically correct plans, robots can still fail to achieve their intended goals. This failure can be attributed to imperfect plans proposed by LLMs or to unforeseeable environmental circumstances that hinder the execution of planned subtasks due to erroneous assumptions about the state of objects. One way to prevent these challenges is to rely on human-provided step-by-step instructions, limiting the autonomy of robotic systems. Vision Language Models (VLMs) have shown remarkable success in tasks such as visual question answering and image captioning. Leveraging the capabilities of VLMs, we present a novel framework called Robotic Replanning with Perception and Language Models (RePLan) that enables real-time replanning capabilities for long-horizon tasks. This framework utilizes the physical grounding provided by a VLM's understanding of the world's state to adapt robot actions when the initial plan fails to achieve the desired goal. We test our approach within four environments containing seven long-horizion tasks. We find that RePLan enables a robot to successfully adapt to unforeseen obstacles while accomplishing open-ended, long-horizon goals, where baseline models cannot. Find more information at https://replan-lm.github.io/replan.github.io/
Errors are Useful Prompts: Instruction Guided Task Programming with Verifier-Assisted Iterative Prompting
Mar 24, 2023Generating low-level robot task plans from high-level natural language instructions remains a challenging problem. Although large language models have shown promising results in generating plans, the accuracy of the output remains unverified. Furthermore, the lack of domain-specific language data poses a limitation on the applicability of these models. In this paper, we propose CLAIRIFY, a novel approach that combines automatic iterative prompting with program verification to ensure programs written in data-scarce domain-specific language are syntactically valid and incorporate environment constraints. Our approach provides effective guidance to the language model on generating structured-like task plans by incorporating any errors as feedback, while the verifier ensures the syntactic accuracy of the generated plans. We demonstrate the effectiveness of CLAIRIFY in planning chemistry experiments by achieving state-of-the-art results. We also show that the generated plans can be executed on a real robot by integrating them with a task and motion planner.
Simultaneous Action Recognition and Human Whole-Body Motion and Dynamics Prediction from Wearable Sensors
Mar 14, 2023This paper presents a novel approach to solve simultaneously the problems of human activity recognition and whole-body motion and dynamics prediction for real-time applications. Starting from the dynamics of human motion and motor system theory, the notion of mixture of experts from deep learning has been extended to address this problem. In the proposed approach, experts are modelled as a sequence-to-sequence recurrent neural networks (RNN) architecture. Experiments show the results of 66-DoF real-world human motion prediction and action recognition during different tasks like walking and rotating. The code associated with this paper is available at: \url{github.com/ami-iit/paper_darvish_2022_humanoids_action-kindyn-predicition}
Teleoperation of Humanoid Robots: A Survey
Jan 11, 2023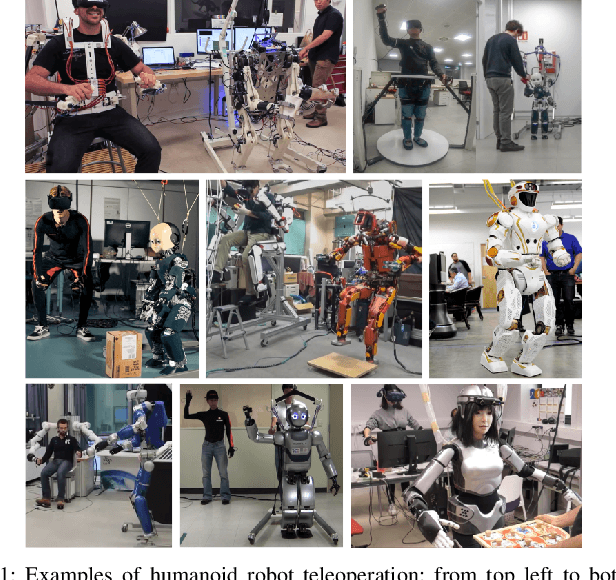
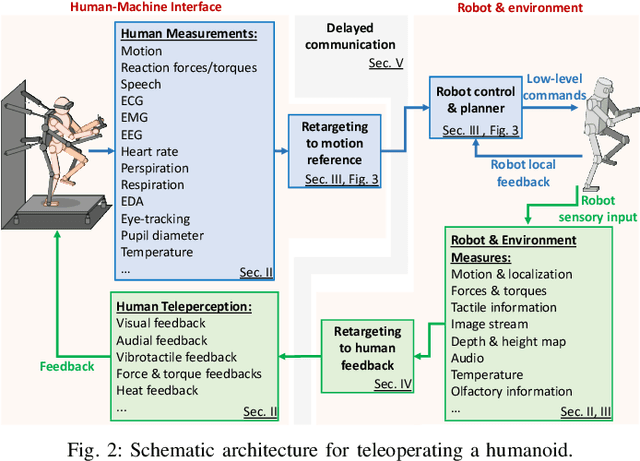
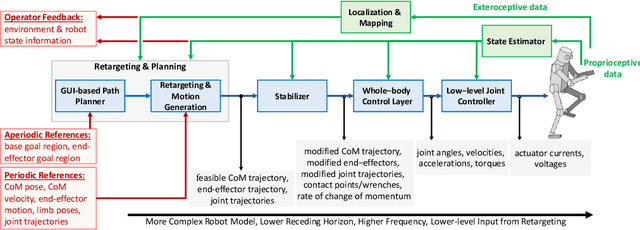
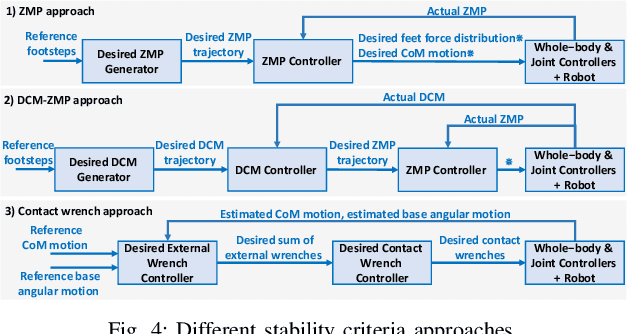
Teleoperation of humanoid robots enables the integration of the cognitive skills and domain expertise of humans with the physical capabilities of humanoid robots. The operational versatility of humanoid robots makes them the ideal platform for a wide range of applications when teleoperating in a remote environment. However, the complexity of humanoid robots imposes challenges for teleoperation, particularly in unstructured dynamic environments with limited communication. Many advancements have been achieved in the last decades in this area, but a comprehensive overview is still missing. This survey paper gives an extensive overview of humanoid robot teleoperation, presenting the general architecture of a teleoperation system and analyzing the different components. We also discuss different aspects of the topic, including technological and methodological advances, as well as potential applications. A web-based version of the paper can be found at https://humanoid-teleoperation.github.io/.