 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRePLan: Robotic Replanning with Perception and Language Models
Jan 08, 2024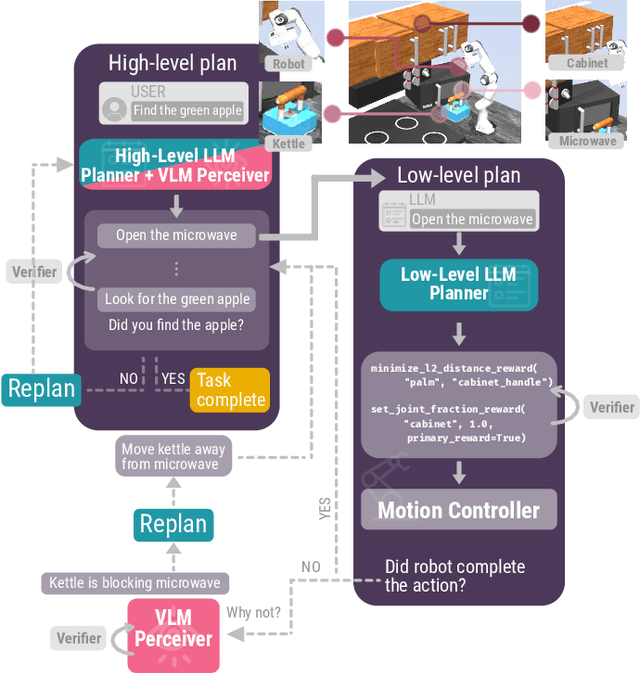
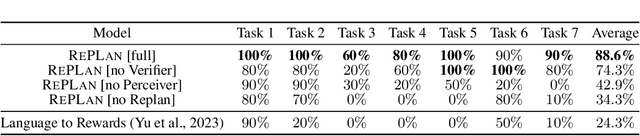
Advancements in large language models (LLMs) have demonstrated their potential in facilitating high-level reasoning, logical reasoning and robotics planning. Recently, LLMs have also been able to generate reward functions for low-level robot actions, effectively bridging the interface between high-level planning and low-level robot control. However, the challenge remains that even with syntactically correct plans, robots can still fail to achieve their intended goals. This failure can be attributed to imperfect plans proposed by LLMs or to unforeseeable environmental circumstances that hinder the execution of planned subtasks due to erroneous assumptions about the state of objects. One way to prevent these challenges is to rely on human-provided step-by-step instructions, limiting the autonomy of robotic systems. Vision Language Models (VLMs) have shown remarkable success in tasks such as visual question answering and image captioning. Leveraging the capabilities of VLMs, we present a novel framework called Robotic Replanning with Perception and Language Models (RePLan) that enables real-time replanning capabilities for long-horizon tasks. This framework utilizes the physical grounding provided by a VLM's understanding of the world's state to adapt robot actions when the initial plan fails to achieve the desired goal. We test our approach within four environments containing seven long-horizion tasks. We find that RePLan enables a robot to successfully adapt to unforeseen obstacles while accomplishing open-ended, long-horizon goals, where baseline models cannot. Find more information at https://replan-lm.github.io/replan.github.io/
ORBIT: A Unified Simulation Framework for Interactive Robot Learning Environments
Jan 10, 2023



We present ORBIT, a unified and modular framework for robot learning powered by NVIDIA Isaac Sim. It offers a modular design to easily and efficiently create robotic environments with photo-realistic scenes and fast and accurate rigid and deformable body simulation. With ORBIT, we provide a suite of benchmark tasks of varying difficulty -- from single-stage cabinet opening and cloth folding to multi-stage tasks such as room reorganization. To support working with diverse observations and action spaces, we include fixed-arm and mobile manipulators with different physically-based sensors and motion generators. ORBIT allows training reinforcement learning policies and collecting large demonstration datasets from hand-crafted or expert solutions in a matter of minutes by leveraging GPU-based parallelization. In summary, we offer an open-sourced framework that readily comes with 16 robotic platforms, 4 sensor modalities, 10 motion generators, more than 20 benchmark tasks, and wrappers to 4 learning libraries. With this framework, we aim to support various research areas, including representation learning, reinforcement learning, imitation learning, and task and motion planning. We hope it helps establish interdisciplinary collaborations in these communities, and its modularity makes it easily extensible for more tasks and applications in the future. For videos, documentation, and code: https://isaac-orbit.github.io/.