 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Canada to Japan: How 10,000 km Affect User Perception in Robot Teleoperation
Aug 07, 2025Robot teleoperation (RTo) has emerged as a viable alternative to local control, particularly when human intervention is still necessary. This research aims to study the distance effect on user perception in RTo, exploring the potential of teleoperated robots for older adult care. We propose an evaluation of non-expert users' perception of long-distance RTo, examining how their perception changes before and after interaction, as well as comparing it to that of locally operated robots. We have designed a specific protocol consisting of multiple questionnaires, along with a dedicated software architecture using the Robotics Operating System (ROS) and Unity. The results revealed no statistically significant differences between the local and remote robot conditions, suggesting that robots may be a viable alternative to traditional local control.
TACT: Humanoid Whole-body Contact Manipulation through Deep Imitation Learning with Tactile Modality
Jun 18, 2025Manipulation with whole-body contact by humanoid robots offers distinct advantages, including enhanced stability and reduced load. On the other hand, we need to address challenges such as the increased computational cost of motion generation and the difficulty of measuring broad-area contact. We therefore have developed a humanoid control system that allows a humanoid robot equipped with tactile sensors on its upper body to learn a policy for whole-body manipulation through imitation learning based on human teleoperation data. This policy, named tactile-modality extended ACT (TACT), has a feature to take multiple sensor modalities as input, including joint position, vision, and tactile measurements. Furthermore, by integrating this policy with retargeting and locomotion control based on a biped model, we demonstrate that the life-size humanoid robot RHP7 Kaleido is capable of achieving whole-body contact manipulation while maintaining balance and walking. Through detailed experimental verification, we show that inputting both vision and tactile modalities into the policy contributes to improving the robustness of manipulation involving broad and delicate contact.
Whole-body Multi-contact Motion Control for Humanoid Robots Based on Distributed Tactile Sensors
May 26, 2025
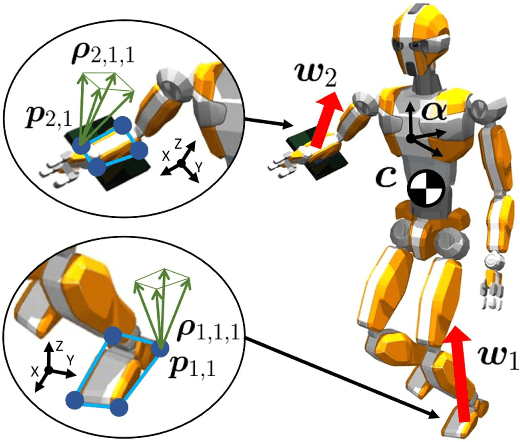
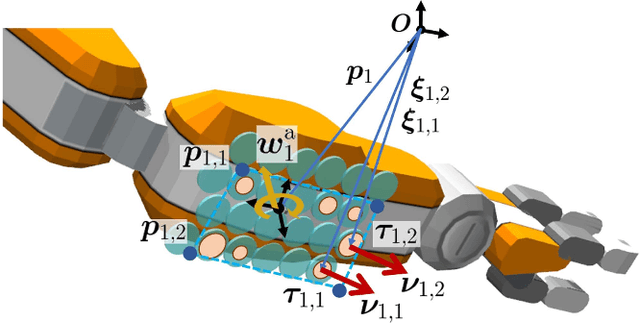

To enable humanoid robots to work robustly in confined environments, multi-contact motion that makes contacts not only at extremities, such as hands and feet, but also at intermediate areas of the limbs, such as knees and elbows, is essential. We develop a method to realize such whole-body multi-contact motion involving contacts at intermediate areas by a humanoid robot. Deformable sheet-shaped distributed tactile sensors are mounted on the surface of the robot's limbs to measure the contact force without significantly changing the robot body shape. The multi-contact motion controller developed earlier, which is dedicated to contact at extremities, is extended to handle contact at intermediate areas, and the robot motion is stabilized by feedback control using not only force/torque sensors but also distributed tactile sensors. Through verification on dynamics simulations, we show that the developed tactile feedback improves the stability of whole-body multi-contact motion against disturbances and environmental errors. Furthermore, the life-sized humanoid RHP Kaleido demonstrates whole-body multi-contact motions, such as stepping forward while supporting the body with forearm contact and balancing in a sitting posture with thigh contacts.
Teleoperation of Humanoid Robots: A Survey
Jan 11, 2023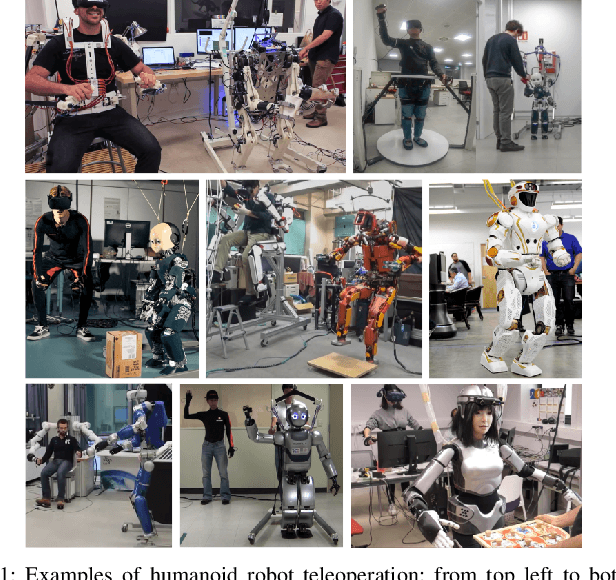
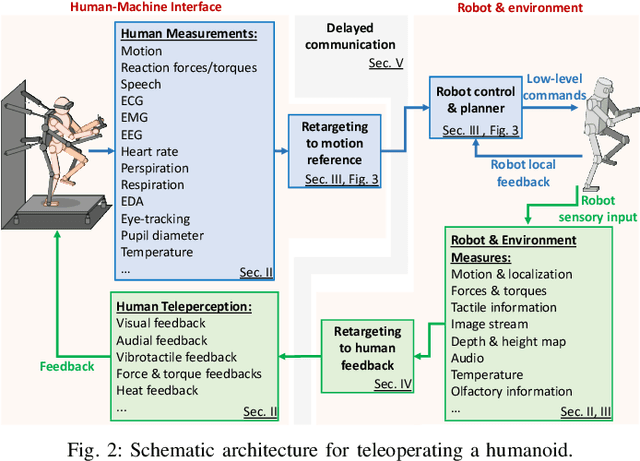
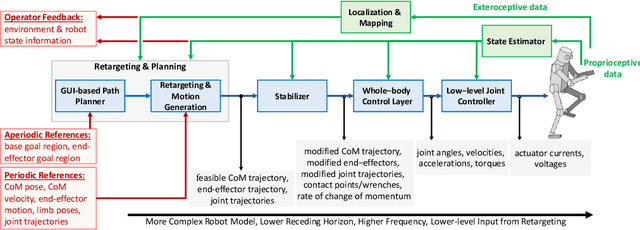
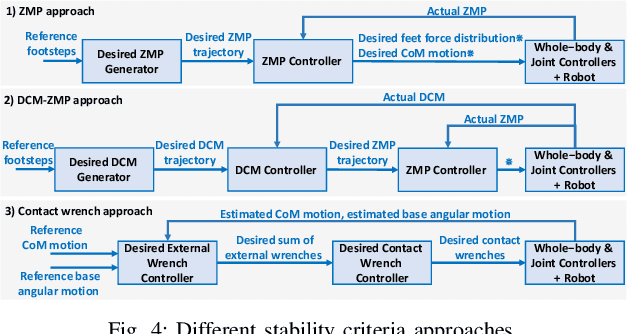
Teleoperation of humanoid robots enables the integration of the cognitive skills and domain expertise of humans with the physical capabilities of humanoid robots. The operational versatility of humanoid robots makes them the ideal platform for a wide range of applications when teleoperating in a remote environment. However, the complexity of humanoid robots imposes challenges for teleoperation, particularly in unstructured dynamic environments with limited communication. Many advancements have been achieved in the last decades in this area, but a comprehensive overview is still missing. This survey paper gives an extensive overview of humanoid robot teleoperation, presenting the general architecture of a teleoperation system and analyzing the different components. We also discuss different aspects of the topic, including technological and methodological advances, as well as potential applications. A web-based version of the paper can be found at https://humanoid-teleoperation.github.io/.
Quotient-Space Motion Planning
Aug 03, 2018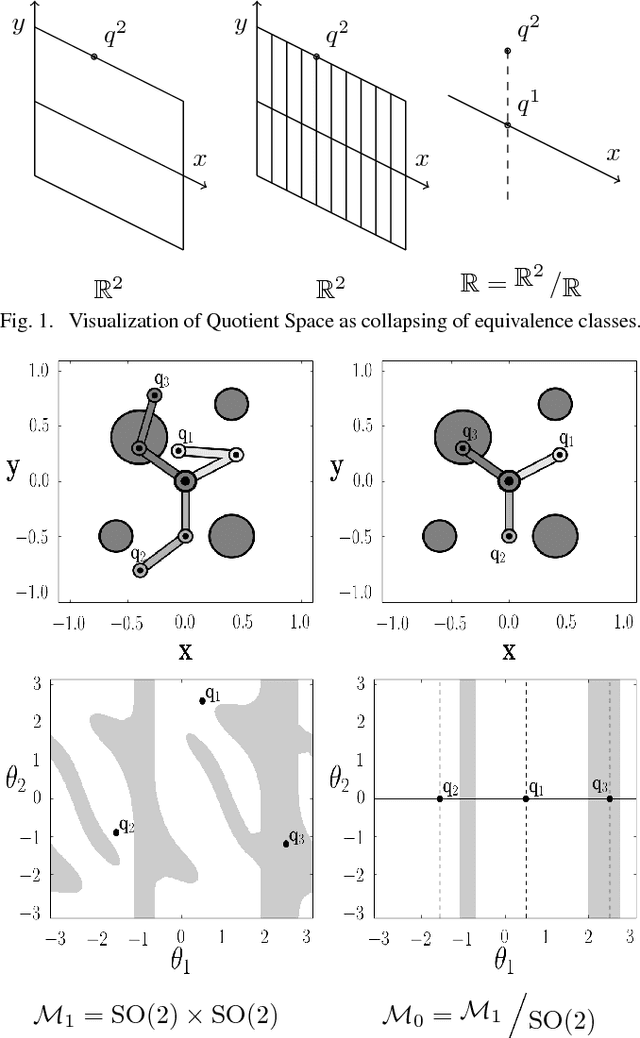
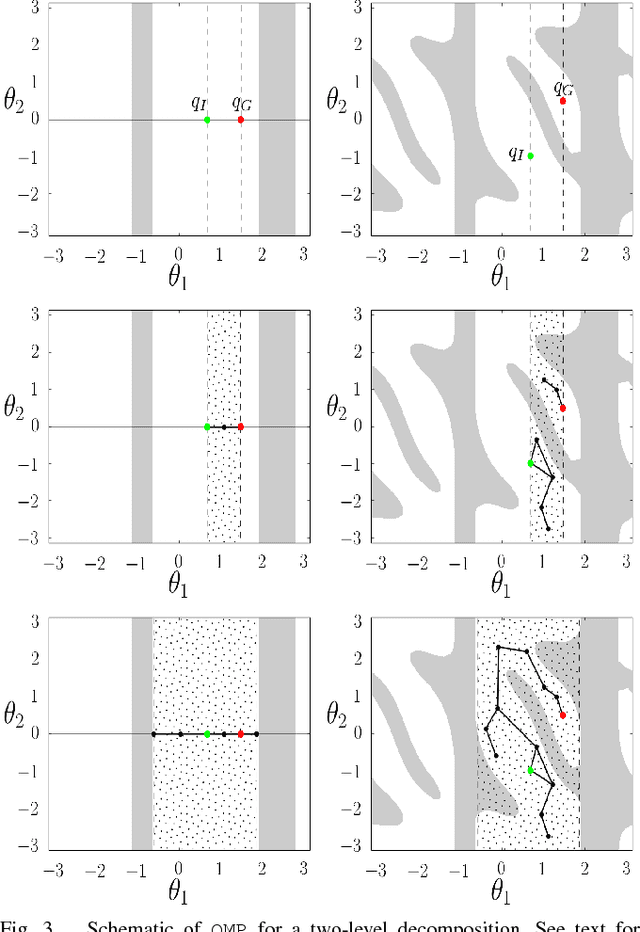
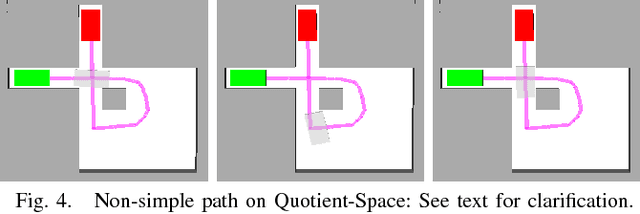
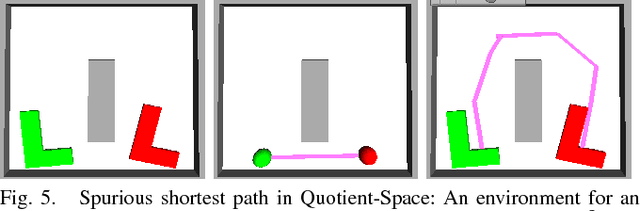
A motion planning algorithm computes the motion of a robot by computing a path through its configuration space. To improve the runtime of motion planning algorithms, we propose to nest robots in each other, creating a nested quotient-space decomposition of the configuration space. Based on this decomposition we define a new roadmap-based motion planning algorithm called the Quotient-space roadMap Planner (QMP). The algorithm starts growing a graph on the lowest dimensional quotient space, switches to the next quotient space once a valid path has been found, and keeps updating the graphs on each quotient space simultaneously until a valid path in the configuration space has been found. We show that this algorithm is probabilistically complete and outperforms a set of state-of-the-art algorithms implemented in the open motion planning library (OMPL).