 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSampling-Based Motion Planning: A Comparative Review
Sep 22, 2023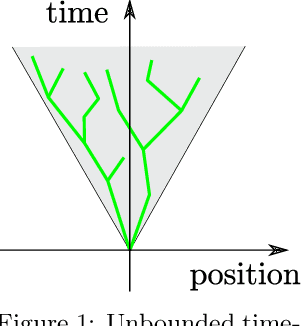
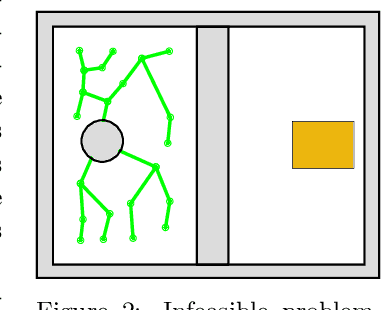
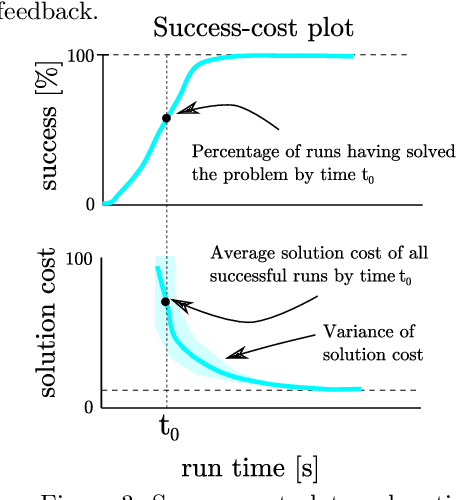
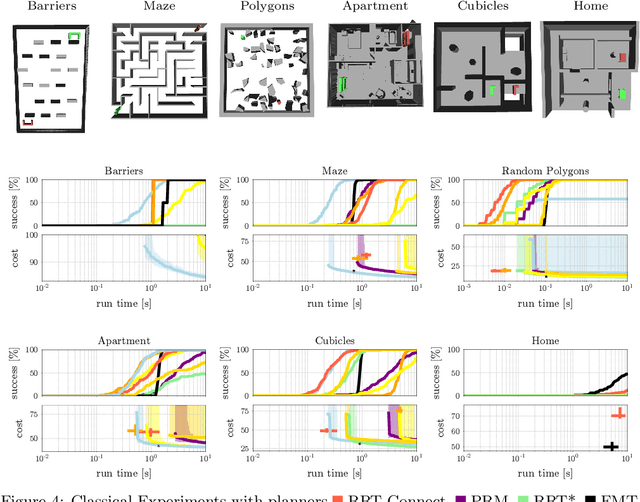
Sampling-based motion planning is one of the fundamental paradigms to generate robot motions, and a cornerstone of robotics research. This comparative review provides an up-to-date guideline and reference manual for the use of sampling-based motion planning algorithms. This includes a history of motion planning, an overview about the most successful planners, and a discussion on their properties. It is also shown how planners can handle special cases and how extensions of motion planning can be accommodated. To put sampling-based motion planning into a larger context, a discussion of alternative motion generation frameworks is presented which highlights their respective differences to sampling-based motion planning. Finally, a set of sampling-based motion planners are compared on 24 challenging planning problems. This evaluation gives insights into which planners perform well in which situations and where future research would be required. This comparative review thereby provides not only a useful reference manual for researchers in the field, but also a guideline for practitioners to make informed algorithmic decisions.
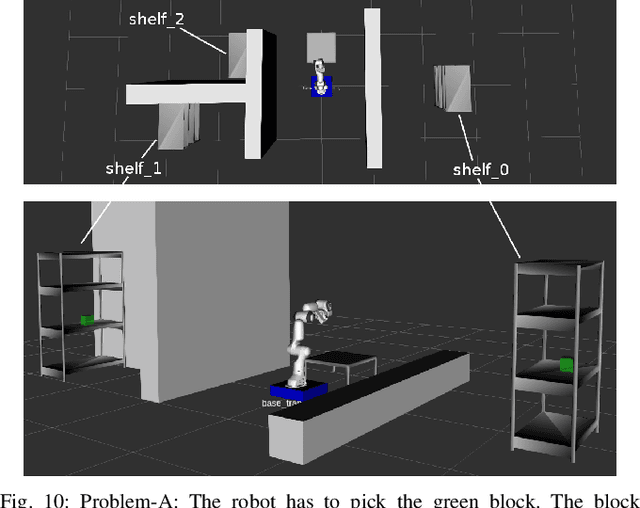
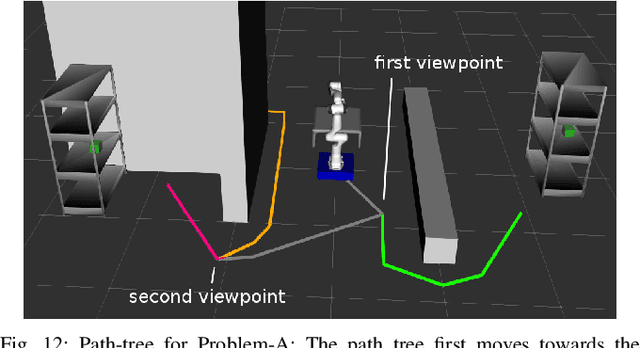
Asymptotically Optimal Belief Space Planning in Discrete Partially-Observable Domains
Sep 19, 2023



Robots often have to operate in discrete partially observable worlds, where the states of world are only observable at runtime. To react to different world states, robots need contingencies. However, computing contingencies is costly and often non-optimal. To address this problem, we develop the improved path tree optimization (PTO) method. PTO computes motion contingencies by constructing a tree of motion paths in belief space. This is achieved by constructing a graph of configurations, then adding observation edges to extend the graph to belief space. Afterwards, we use a dynamic programming step to extract the path tree. PTO extends prior work by adding a camera-based state sampler to improve the search for observation points. We also add support to non-euclidean state spaces, provide an implementation in the open motion planning library (OMPL), and evaluate PTO on four realistic scenarios with a virtual camera in up to 10-dimensional state spaces. We compare PTO with a default and with the new camera-based state sampler. The results indicate that the camera-based state sampler improves success rates in 3 out of 4 scenarios while having a significant lower memory footprint. This makes PTO an important contribution to advance the state-of-the-art for discrete belief space planning.
Fast-dRRT*: Efficient Multi-Robot Motion Planning for Automated Industrial Manufacturing
Sep 19, 2023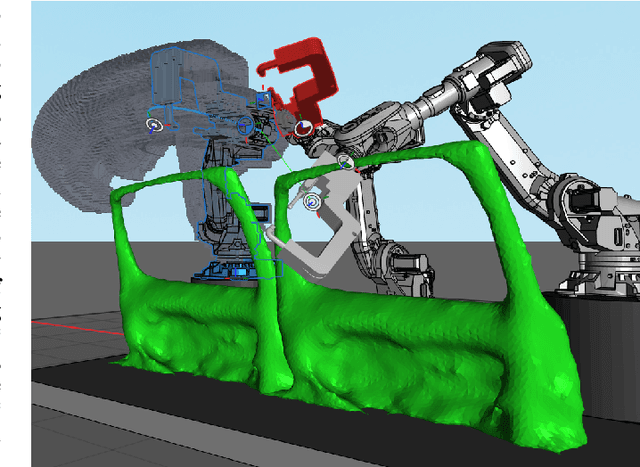
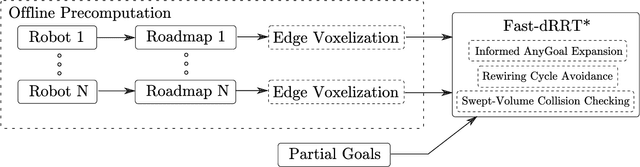
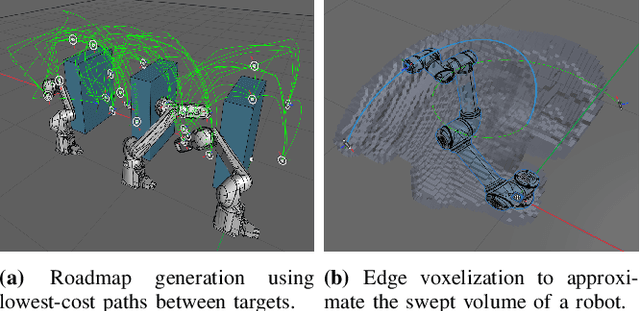
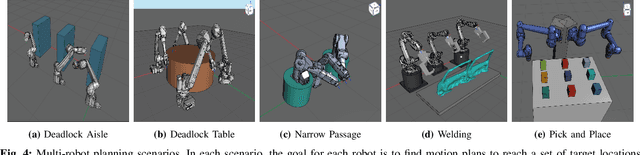
We present Fast-dRRT*, a sampling-based multi-robot planner, for real-time industrial automation scenarios. Fast-dRRT* builds upon the discrete rapidly-exploring random tree (dRRT*) planner, and extends dRRT* by using pre-computed swept volumes for efficient collision detection, deadlock avoidance for partial multi-robot problems, and a simplified rewiring strategy. We evaluate Fast-dRRT* on five challenging multi-robot scenarios using two to four industrial robot arms from various manufacturers. The scenarios comprise situations involving deadlocks, narrow passages, and close proximity tasks. The results are compared against dRRT*, and show Fast-dRRT* to outperform dRRT* by up to 94% in terms of finding solutions within given time limits, while only sacrificing up to 35% on initial solution cost. Furthermore, Fast-dRRT* demonstrates resilience against noise in target configurations, and is able to solve challenging welding, and pick and place tasks with reduced computational time. This makes Fast-dRRT* a promising option for real-time motion planning in industrial automation.
Solving Rearrangement Puzzles using Path Defragmentation in Factored State Spaces
Dec 06, 2022



Rearrangement puzzles are variations of rearrangement problems in which the elements of a problem are potentially logically linked together. To efficiently solve such puzzles, we develop a motion planning approach based on a new state space that is logically factored, integrating the capabilities of the robot through factors of simultaneously manipulatable joints of an object. Based on this factored state space, we propose less-actions RRT (LA-RRT), a planner which optimizes for a low number of actions to solve a puzzle. At the core of our approach lies a new path defragmentation method, which rearranges and optimizes consecutive edges to minimize action cost. We solve six rearrangement scenarios with a Fetch robot, involving planar table puzzles and an escape room scenario. LA-RRT significantly outperforms the next best asymptotically-optimal planner by 4.01 to 6.58 times improvement in final action cost.
Multi-Arm Bin-Picking in Real-Time: A Combined Task and Motion Planning Approach
Nov 20, 2022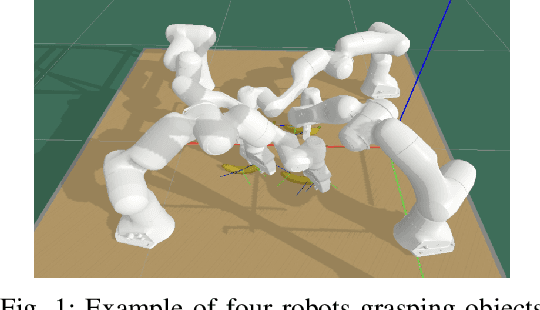
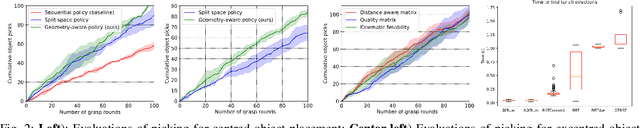
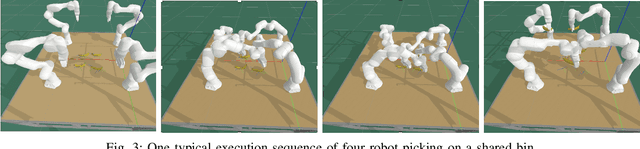
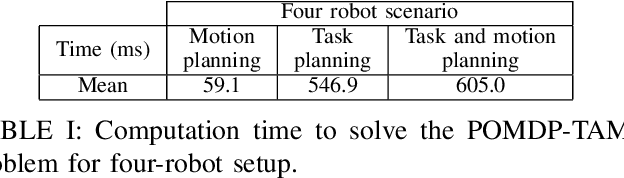
Automated bin-picking is a prerequisite for fully automated manufacturing and warehouses. To successfully pick an item from an unstructured bin the robot needs to first detect possible grasps for the objects, decide on the object to remove and consequently plan and execute a feasible trajectory to retrieve the chosen object. Over the last years significant progress has been made towards solving these problems. However, when multiple robot arms are cooperating the decision and planning problems become exponentially harder. We propose an integrated multi-arm bin-picking pipeline (IMAPIP), and demonstrate that it is able to reliably pick objects from a bin in real-time using multiple robot arms. IMAPIP solves the multi-arm bin-picking task first at high-level using a geometry-aware policy integrated in a combined task and motion planning framework. We then plan motions consistent with this policy using the BIT* algorithm on the motion planning level. We show that this integrated solution enables robot arm cooperation. In our experiments, we show the proposed geometry-aware policy outperforms a baseline by increasing bin-picking time by 28\% using two robot arms. The policy is robust to changes in the position of the bin and number of objects. We also show that IMAPIP to successfully scale up to four robot arms working in close proximity.
Path-Tree Optimization in Partially Observable Environments using Rapidly-Exploring Belief-Space Graphs
Apr 09, 2022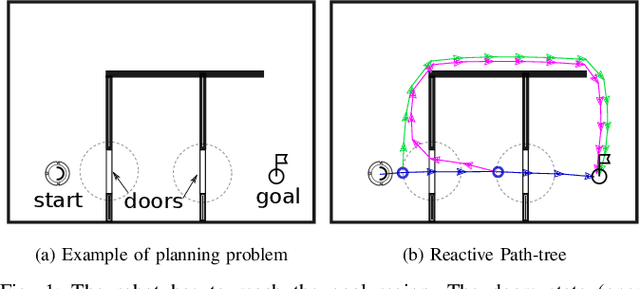

Robots often need to solve path planning problems where essential and discrete aspects of the environment are partially observable. This introduces a multi-modality, where the robot must be able to observe and infer the state of its environment. To tackle this problem, we introduce the Path-Tree Optimization (PTO) algorithm which plans a path-tree in belief-space. A path-tree is a tree-like motion with branching points where the robot receives an observation leading to a belief-state update. The robot takes different branches depending on the observation received. The algorithm has three main steps. First, a rapidly-exploring random graph (RRG) on the state space is grown. Second, the RRG is expanded to a belief-space graph by querying the observation model. In a third step, dynamic programming is performed on the belief-space graph to extract a path-tree. The resulting path-tree combines exploration with exploitation i.e. it balances the need for gaining knowledge about the environment with the need for reaching the goal. We demonstrate the algorithm capabilities on navigation and mobile manipulation tasks, and show its advantage over a baseline using a task and motion planning approach (TAMP) both in terms of optimality and runtime.
ST-RRT*: Asymptotically-Optimal Bidirectional Motion Planning through Space-Time
Mar 04, 2022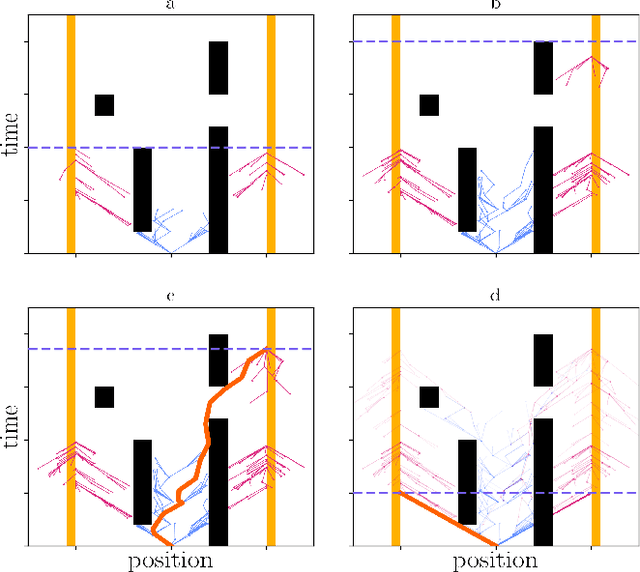
We present a motion planner for planning through space-time with dynamic obstacles, velocity constraints, and unknown arrival time. Our algorithm, Space-Time RRT* (ST-RRT*), is a probabilistically complete, bidirectional motion planning algorithm, which is asymptotically optimal with respect to the shortest arrival time. We experimentally evaluate ST-RRT* in both abstract (2D disk, 8D disk in cluttered spaces, and on a narrow passage problem), and simulated robotic path planning problems (sequential planning of 8DoF mobile robots, and 7DoF robotic arms). The proposed planner outperforms RRT-Connect and RRT* on both initial solution time, and attained final solution cost. The code for ST-RRT* is available in the Open Motion Planning Library (OMPL).
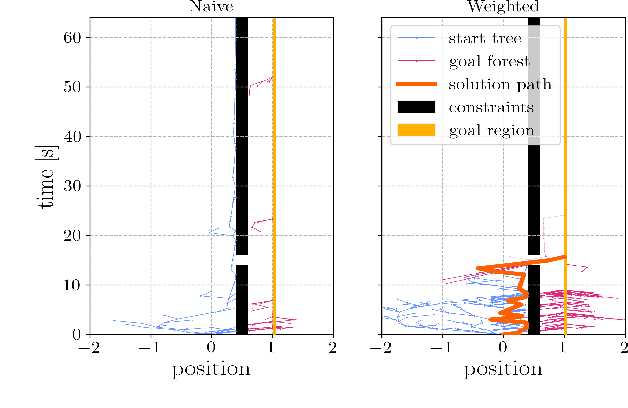
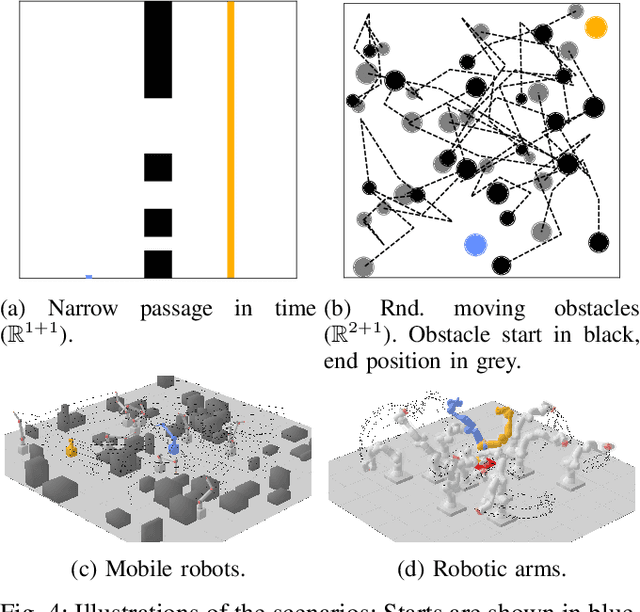
BITKOMO: Combining Sampling and Optimization for Fast Convergence in Optimal Motion Planning
Mar 03, 2022
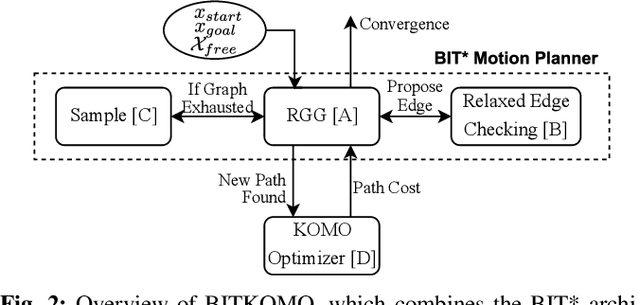

Optimal sampling based motion planning and trajectory optimization are two competing frameworks to generate optimal motion plans. Both frameworks have complementary properties: Sampling based planners are typically slow to converge, but provide optimality guarantees. Trajectory optimizers, however, are typically fast to converge, but do not provide global optimality guarantees in nonconvex problems, e.g. scenarios with obstacles. To achieve the best of both worlds, we introduce a new planner, BITKOMO, which integrates the asymptotically optimal Batch Informed Trees (BIT*) planner with the K-Order Markov Optimization (KOMO) trajectory optimization framework. Our planner is anytime and maintains the same asymptotic optimality guarantees provided by BIT*, while also exploiting the fast convergence of the KOMO trajectory optimizer. We experimentally evaluate our planner on manipulation scenarios that involve high dimensional configuration spaces, with up to two 7-DoF manipulators, obstacles and narrow passages. BITKOMO performs better than KOMO by succeeding even when KOMO fails, and it outperforms BIT* in terms of convergence to the optimal solution.
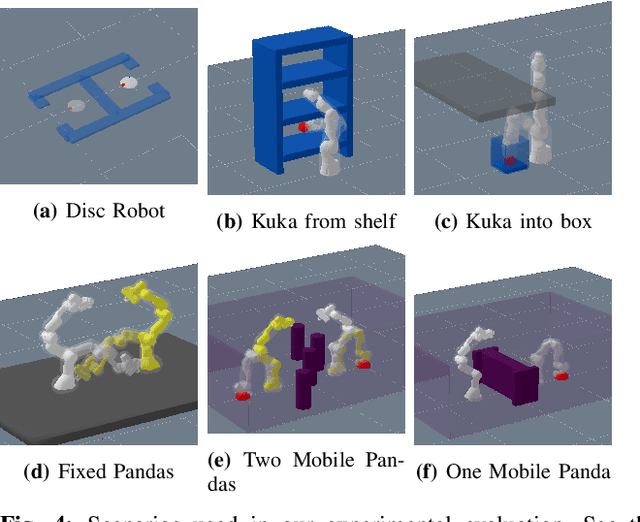
MotionBenchMaker: A Tool to Generate and Benchmark Motion Planning Datasets
Dec 13, 2021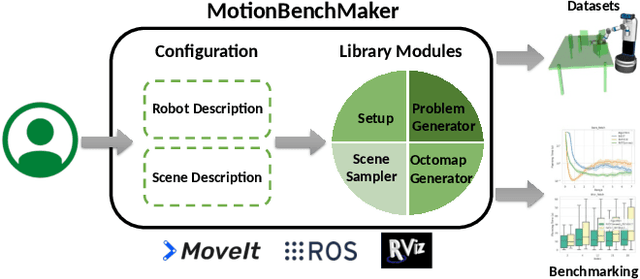
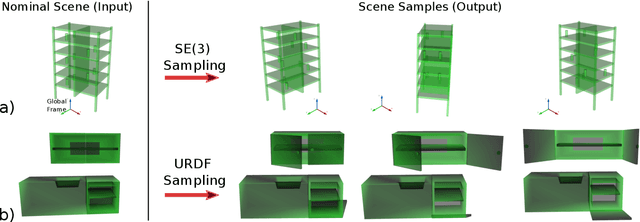
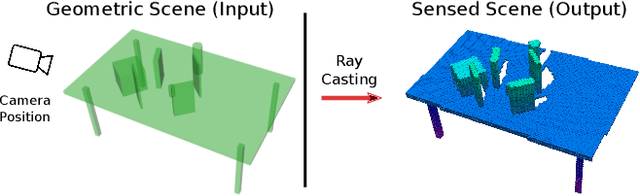
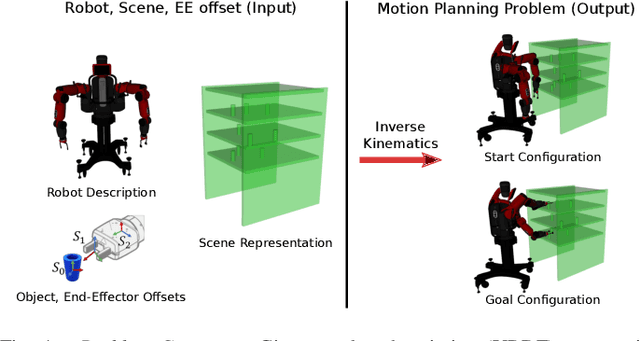
Recently, there has been a wealth of development in motion planning for robotic manipulation new motion planners are continuously proposed, each with their own unique strengths and weaknesses. However, evaluating new planners is challenging and researchers often create their own ad-hoc problems for benchmarking, which is time-consuming, prone to bias, and does not directly compare against other state-of-the-art planners. We present MotionBenchMaker, an open-source tool to generate benchmarking datasets for realistic robot manipulation problems. MotionBenchMaker is designed to be an extensible, easy-to-use tool that allows users to both generate datasets and benchmark them by comparing motion planning algorithms. Empirically, we show the benefit of using MotionBenchMaker as a tool to procedurally generate datasets which helps in the fair evaluation of planners. We also present a suite of 40 prefabricated datasets, with 5 different commonly used robots in 8 environments, to serve as a common ground to accelerate motion planning research.
Approximate Topological Optimization using Multi-Mode Estimation for Robot Motion Planning
Jul 06, 2021

In this extended abstract, we report on ongoing work towards an approximate multimodal optimization algorithm with asymptotic guarantees. Multimodal optimization is the problem of finding all local optimal solutions (modes) to a path optimization problem. This is important to compress path databases, as contingencies for replanning and as source of symbolic representations. Following ideas from Morse theory, we define modes as paths invariant under optimization of a cost functional. We develop a multi-mode estimation algorithm which approximately finds all modes of a given motion optimization problem and asymptotically converges. This is made possible by integrating sparse roadmaps with an existing single-mode optimization algorithm. Initial evaluation results show the multi-mode estimation algorithm as a promising direction to study path spaces from a topological point of view.