 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSampling-Based Motion Planning: A Comparative Review
Paper and Code
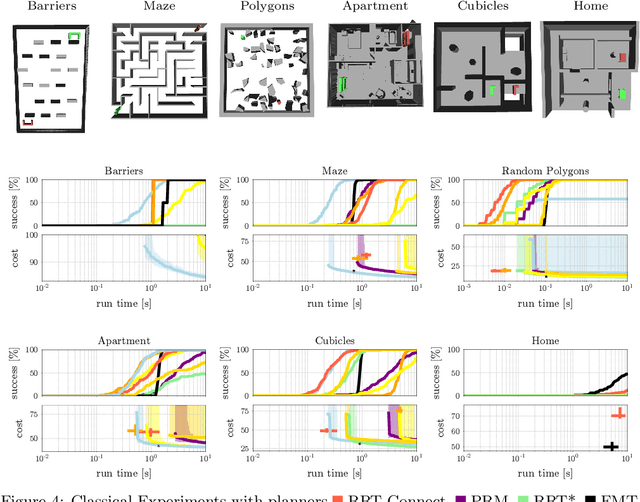
Sampling-based motion planning is one of the fundamental paradigms to generate robot motions, and a cornerstone of robotics research. This comparative review provides an up-to-date guideline and reference manual for the use of sampling-based motion planning algorithms. This includes a history of motion planning, an overview about the most successful planners, and a discussion on their properties. It is also shown how planners can handle special cases and how extensions of motion planning can be accommodated. To put sampling-based motion planning into a larger context, a discussion of alternative motion generation frameworks is presented which highlights their respective differences to sampling-based motion planning. Finally, a set of sampling-based motion planners are compared on 24 challenging planning problems. This evaluation gives insights into which planners perform well in which situations and where future research would be required. This comparative review thereby provides not only a useful reference manual for researchers in the field, but also a guideline for practitioners to make informed algorithmic decisions.