 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast-dRRT*: Efficient Multi-Robot Motion Planning for Automated Industrial Manufacturing
Sep 19, 2023
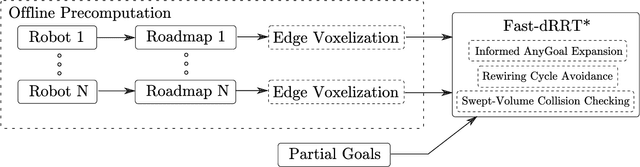
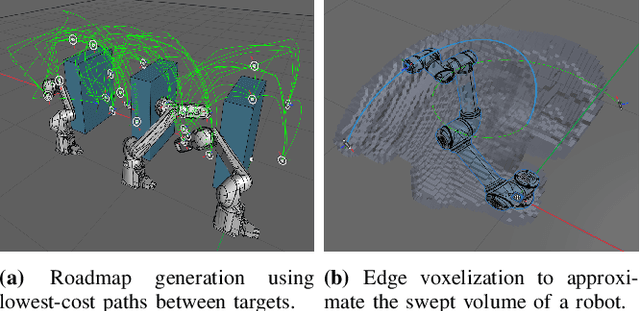
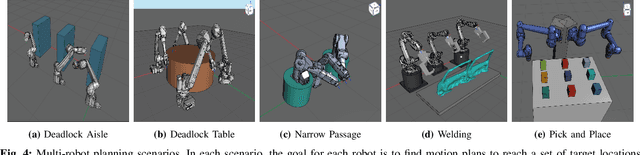
We present Fast-dRRT*, a sampling-based multi-robot planner, for real-time industrial automation scenarios. Fast-dRRT* builds upon the discrete rapidly-exploring random tree (dRRT*) planner, and extends dRRT* by using pre-computed swept volumes for efficient collision detection, deadlock avoidance for partial multi-robot problems, and a simplified rewiring strategy. We evaluate Fast-dRRT* on five challenging multi-robot scenarios using two to four industrial robot arms from various manufacturers. The scenarios comprise situations involving deadlocks, narrow passages, and close proximity tasks. The results are compared against dRRT*, and show Fast-dRRT* to outperform dRRT* by up to 94% in terms of finding solutions within given time limits, while only sacrificing up to 35% on initial solution cost. Furthermore, Fast-dRRT* demonstrates resilience against noise in target configurations, and is able to solve challenging welding, and pick and place tasks with reduced computational time. This makes Fast-dRRT* a promising option for real-time motion planning in industrial automation.