 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeST-RRT*: Asymptotically-Optimal Bidirectional Motion Planning through Space-Time
Paper and Code
Mar 04, 2022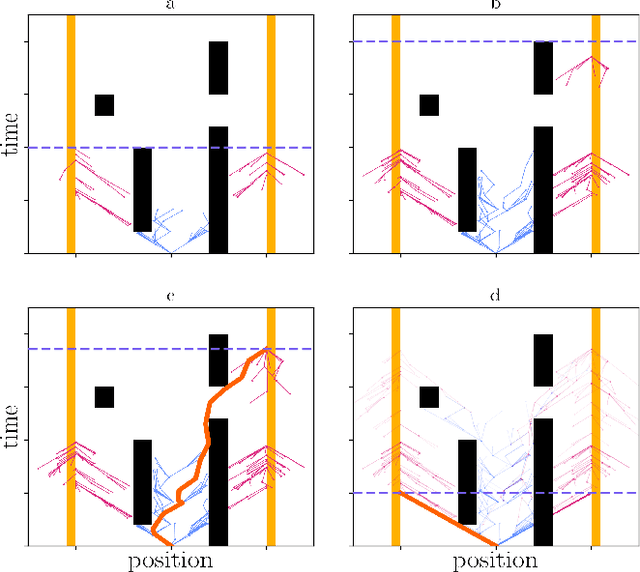
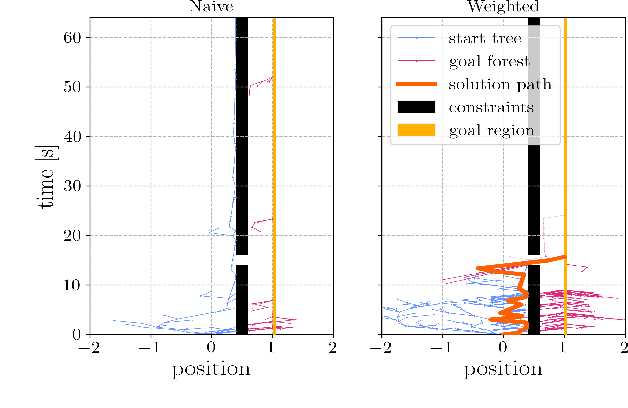
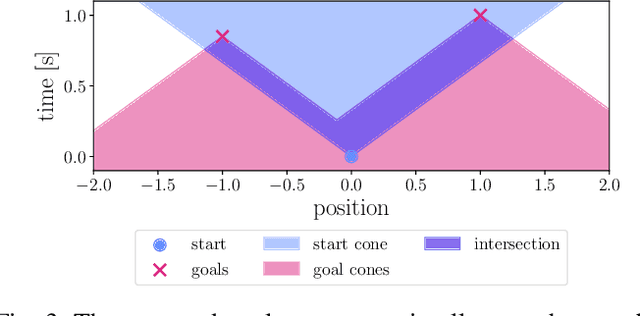
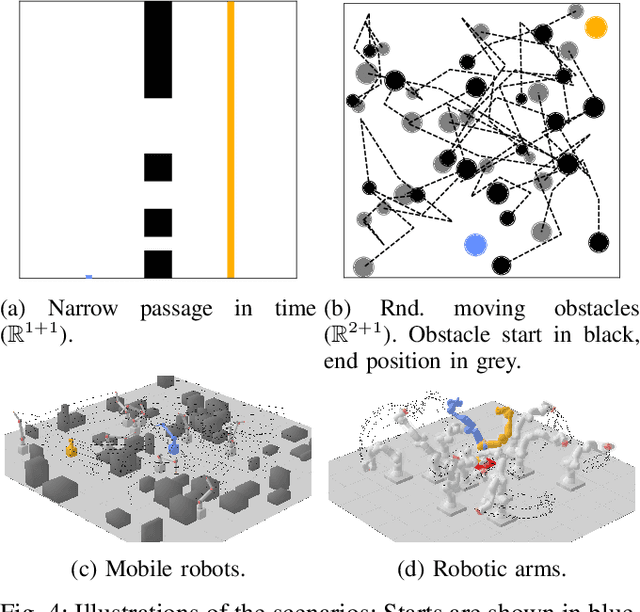
We present a motion planner for planning through space-time with dynamic obstacles, velocity constraints, and unknown arrival time. Our algorithm, Space-Time RRT* (ST-RRT*), is a probabilistically complete, bidirectional motion planning algorithm, which is asymptotically optimal with respect to the shortest arrival time. We experimentally evaluate ST-RRT* in both abstract (2D disk, 8D disk in cluttered spaces, and on a narrow passage problem), and simulated robotic path planning problems (sequential planning of 8DoF mobile robots, and 7DoF robotic arms). The proposed planner outperforms RRT-Connect and RRT* on both initial solution time, and attained final solution cost. The code for ST-RRT* is available in the Open Motion Planning Library (OMPL).