 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInfinite-Horizon Value Function Approximation for Model Predictive Control
Feb 10, 2025Model Predictive Control has emerged as a popular tool for robots to generate complex motions. However, the real-time requirement has limited the use of hard constraints and large preview horizons, which are necessary to ensure safety and stability. In practice, practitioners have to carefully design cost functions that can imitate an infinite horizon formulation, which is tedious and often results in local minima. In this work, we study how to approximate the infinite horizon value function of constrained optimal control problems with neural networks using value iteration and trajectory optimization. Furthermore, we demonstrate how using this value function approximation as a terminal cost provides global stability to the model predictive controller. The approach is validated on two toy problems and a real-world scenario with online obstacle avoidance on an industrial manipulator where the value function is conditioned to the goal and obstacle.
NLP Sampling: Combining MCMC and NLP Methods for Diverse Constrained Sampling
Jul 03, 2024Generating diverse samples under hard constraints is a core challenge in many areas. With this work we aim to provide an integrative view and framework to combine methods from the fields of MCMC, constrained optimization, as well as robotics, and gain insights in their strengths from empirical evaluations. We propose NLP Sampling as a general problem formulation, propose a family of restarting two-phase methods as a framework to integrated methods from across the fields, and evaluate them on analytical and robotic manipulation planning problems. Complementary to this, we provide several conceptual discussions, e.g. on the role of Lagrange parameters, global sampling, and the idea of a Diffused NLP and a corresponding model-based denoising sampler.
Solving Sequential Manipulation Puzzles by Finding Easier Subproblems
May 03, 2024We consider a set of challenging sequential manipulation puzzles, where an agent has to interact with multiple movable objects and navigate narrow passages. Such settings are notoriously difficult for Task-and-Motion Planners, as they require interdependent regrasps and solving hard motion planning problems. In this paper, we propose to search over sequences of easier pick-and-place subproblems, which can lead to the solution of the manipulation puzzle. Our method combines a heuristic-driven forward search of subproblems with an optimization-based Task-and-Motion Planning solver. To guide the search, we introduce heuristics to generate and prioritize useful subgoals. We evaluate our approach on various manually designed and automatically generated scenes, demonstrating the benefits of auxiliary subproblems in sequential manipulation planning.
Factored Task and Motion Planning with Combined Optimization, Sampling and Learning
Apr 04, 2024In this thesis, we aim to improve the performance of TAMP algorithms from three complementary perspectives. First, we investigate the integration of discrete task planning with continuous trajectory optimization. Our main contribution is a conflict-based solver that automatically discovers why a task plan might fail when considering the constraints of the physical world. This information is then fed back into the task planner, resulting in an efficient, bidirectional, and intuitive interface between task and motion, capable of solving TAMP problems with multiple objects, robots, and tight physical constraints. In the second part, we first illustrate that, given the wide range of tasks and environments within TAMP, neither sampling nor optimization is superior in all settings. To combine the strengths of both approaches, we have designed meta-solvers for TAMP, adaptive solvers that automatically select which algorithms and computations to use and how to best decompose each problem to find a solution faster. In the third part, we combine deep learning architectures with model-based reasoning to accelerate computations within our TAMP solver. Specifically, we target infeasibility detection and nonlinear optimization, focusing on generalization, accuracy, compute time, and data efficiency. At the core of our contributions is a refined, factored representation of the trajectory optimization problems inside TAMP. This structure not only facilitates more efficient planning, encoding of geometric infeasibility, and meta-reasoning but also provides better generalization in neural architectures.
iDb-RRT: Sampling-based Kinodynamic Motion Planning with Motion Primitives and Trajectory Optimization
Mar 16, 2024


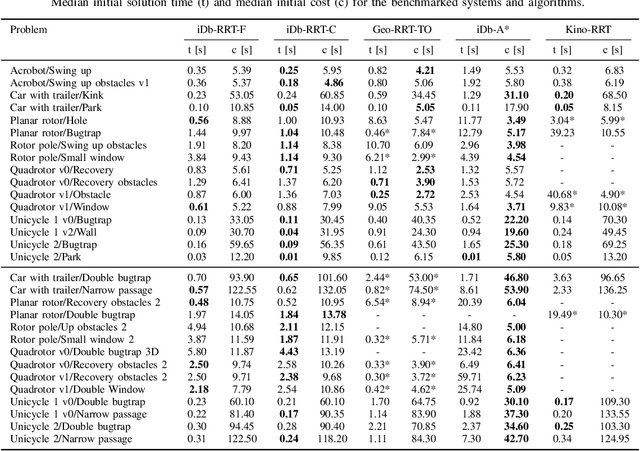
Rapidly-exploring Random Trees (RRT) and its variations have emerged as a robust and efficient tool for finding collision-free paths in robotic systems. However, adding dynamic constraints makes the motion planning problem significantly harder, as it requires solving two-value boundary problems (computationally expensive) or propagating random control inputs (uninformative). Alternatively, Iterative Discontinuity Bounded A* (iDb-A*), introduced in our previous study, combines search and optimization iteratively. The search step connects short trajectories (motion primitives) while allowing a bounded discontinuity between the motion primitives, which is later repaired in the trajectory optimization step. Building upon these foundations, in this paper, we present iDb-RRT, a sampling-based kinodynamic motion planning algorithm that combines motion primitives and trajectory optimization within the RRT framework. iDb-RRT is probabilistically complete and can be implemented in forward or bidirectional mode. We have tested our algorithm across a benchmark suite comprising 30 problems, spanning 8 different systems, and shown that iDb-RRT can find solutions up to 10x faster than previous methods, especially in complex scenarios that require long trajectories or involve navigating through narrow passages.
iDb-A*: Iterative Search and Optimization for Optimal Kinodynamic Motion Planning
Nov 06, 2023



Motion planning for robotic systems with complex dynamics is a challenging problem. While recent sampling-based algorithms achieve asymptotic optimality by propagating random control inputs, their empirical convergence rate is often poor, especially in high-dimensional systems such as multirotors. An alternative approach is to first plan with a simplified geometric model and then use trajectory optimization to follow the reference path while accounting for the true dynamics. However, this approach may fail to produce a valid trajectory if the initial guess is not close to a dynamically feasible trajectory. In this paper, we present Iterative Discontinuity Bounded A* (iDb-A*), a novel kinodynamic motion planner that combines search and optimization iteratively. The search step utilizes a finite set of short trajectories (motion primitives) that are interconnected while allowing for a bounded discontinuity between them. The optimization step locally repairs the discontinuities with trajectory optimization. By progressively reducing the allowed discontinuity and incorporating more motion primitives, our algorithm achieves asymptotic optimality with excellent any-time performance. We provide a benchmark of 43 problems across eight different dynamical systems, including different versions of unicycles and multirotors. Compared to state-of-the-art methods, iDb-A* consistently solves more problem instances and finds lower-cost solutions more rapidly.
Kinodynamic Motion Planning for a Team of Multirotors Transporting a Cable-Suspended Payload in Cluttered Environments
Oct 05, 2023



We propose a motion planner for cable-driven payload transportation using multiple unmanned aerial vehicles (UAVs) in an environment cluttered with obstacles. Our planner is kinodynamic, i.e., it considers the full dynamics model of the transporting system including actuation constraints. Due to the high dimensionality of the planning problem, we use a hierarchical approach where we first solve the geometric motion planning using a sampling-based method with a novel sampler, followed by constrained trajectory optimization that considers the full dynamics of the system. Both planning stages consider inter-robot and robot/obstacle collisions. We demonstrate in a software-in-the-loop simulation that there is a significant benefit in kinodynamic motion planning for such payload transport systems with respect to payload tracking error and energy consumption compared to the standard methods of planning for the payload alone. Notably, we observe a significantly higher success rate in scenarios where the team formation changes are needed to move through tight spaces.
db-CBS: Discontinuity-Bounded Conflict-Based Search for Multi-Robot Kinodynamic Motion Planning
Sep 28, 2023


This paper presents a multi-robot kinodynamic motion planner that enables a team of robots with different dynamics, actuation limits, and shapes to reach their goals in challenging environments. We solve this problem by combining Conflict-Based Search (CBS), a multi-agent path finding method, and discontinuity-bounded A*, a single-robot kinodynamic motion planner. Our method, db-CBS, operates in three levels. Initially, we compute trajectories for individual robots using a graph search that allows bounded discontinuities between precomputed motion primitives. The second level identifies inter-robot collisions and resolves them by imposing constraints on the first level. The third and final level uses the resulting solution with discontinuities as an initial guess for a joint space trajectory optimization. The procedure is repeated with a reduced discontinuity bound. Our approach is anytime, probabilistically complete, asymptotically optimal, and finds near-optimal solutions quickly. Experimental results with robot dynamics such as unicycle, double integrator, and car with trailer in different settings show that our method is capable of solving challenging tasks with a higher success rate and lower cost than the existing state-of-the-art.
Neural Field Representations of Articulated Objects for Robotic Manipulation Planning
Sep 14, 2023Traditional approaches for manipulation planning rely on an explicit geometric model of the environment to formulate a given task as an optimization problem. However, inferring an accurate model from raw sensor input is a hard problem in itself, in particular for articulated objects (e.g., closets, drawers). In this paper, we propose a Neural Field Representation (NFR) of articulated objects that enables manipulation planning directly from images. Specifically, after taking a few pictures of a new articulated object, we can forward simulate its possible movements, and, therefore, use this neural model directly for planning with trajectory optimization. Additionally, this representation can be used for shape reconstruction, semantic segmentation and image rendering, which provides a strong supervision signal during training and generalization. We show that our model, which was trained only on synthetic images, is able to extract a meaningful representation for unseen objects of the same class, both in simulation and with real images. Furthermore, we demonstrate that the representation enables robotic manipulation of an articulated object in the real world directly from images.
Comparison of Optimization-Based Methods for Energy-Optimal Quadrotor Motion Planning
Apr 27, 2023


Quadrotors are agile flying robots that are challenging to control. Considering the full dynamics of quadrotors during motion planning is crucial to achieving good solution quality and small tracking errors during flight. Optimization-based methods scale well with high-dimensional state spaces and can handle dynamic constraints directly, therefore they are often used in these scenarios. The resulting optimization problem is notoriously difficult to solve due to its nonconvex constraints. In this work, we present an analysis of four solvers for nonlinear trajectory optimization (KOMO, direct collocation with SCvx, direct collocation with CasADi, Crocoddyl) and evaluate their performance in scenarios where the solvers are tasked to find minimum-effort solutions to geometrically complex problems and problems requiring highly dynamic solutions. Benchmarking these methods helps to determine the best algorithm structures for these kinds of problems.