 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCrazyMARL: Decentralized Direct Motor Control Policies for Cooperative Aerial Transport of Cable-Suspended Payloads
Sep 17, 2025Collaborative transportation of cable-suspended payloads by teams of Unmanned Aerial Vehicles (UAVs) has the potential to enhance payload capacity, adapt to different payload shapes, and provide built-in compliance, making it attractive for applications ranging from disaster relief to precision logistics. However, multi-UAV coordination under disturbances, nonlinear payload dynamics, and slack--taut cable modes remains a challenging control problem. To our knowledge, no prior work has addressed these cable mode transitions in the multi-UAV context, instead relying on simplifying rigid-link assumptions. We propose CrazyMARL, a decentralized Reinforcement Learning (RL) framework for multi-UAV cable-suspended payload transport. Simulation results demonstrate that the learned policies can outperform classical decentralized controllers in terms of disturbance rejection and tracking precision, achieving an 80% recovery rate from harsh conditions compared to 44% for the baseline method. We also achieve successful zero-shot sim-to-real transfer and demonstrate that our policies are highly robust under harsh conditions, including wind, random external disturbances, and transitions between slack and taut cable dynamics. This work paves the way for autonomous, resilient UAV teams capable of executing complex payload missions in unstructured environments.
pc-dbCBS: Kinodynamic Motion Planning of Physically-Coupled Robot Teams
May 15, 2025Motion planning problems for physically-coupled multi-robot systems in cluttered environments are challenging due to their high dimensionality. Existing methods combining sampling-based planners with trajectory optimization produce suboptimal results and lack theoretical guarantees. We propose Physically-coupled discontinuity-bounded Conflict-Based Search (pc-dbCBS), an anytime kinodynamic motion planner, that extends discontinuity-bounded CBS to rigidly-coupled systems. Our approach proposes a tri-level conflict detection and resolution framework that includes the physical coupling between the robots. Moreover, pc-dbCBS alternates iteratively between state space representations, thereby preserving probabilistic completeness and asymptotic optimality while relying only on single-robot motion primitives. Across 25 simulated and six real-world problems involving multirotors carrying a cable-suspended payload and differential-drive robots linked by rigid rods, pc-dbCBS solves up to 92% more instances than a state-of-the-art baseline and plans trajectories that are 50-60% faster while reducing planning time by an order of magnitude.
Neural-Augmented Incremental Nonlinear Dynamic Inversion for Quadrotors with Payload Adaptation
Mar 12, 2025The increasing complexity of multirotor applications has led to the need of more accurate flight controllers that can reliably predict all forces acting on the robot. Traditional flight controllers model a large part of the forces but do not take so called residual forces into account. A reason for this is that accurately computing the residual forces can be computationally expensive. Incremental Nonlinear Dynamic Inversion (INDI) is a method that computes the difference between different sensor measurements in order to estimate these residual forces. The main issue with INDI is it's reliance on special sensor measurements which can be very noisy. Recent work has also shown that residual forces can be predicted using learning-based methods. In this work, we demonstrate that a learning algorithm can predict a smoother version of INDI outputs without requiring additional sensor measurements. In addition, we introduce a new method that combines learning based predictions with INDI. We also adapt the two approaches to work on quadrotors carrying a slung-type payload. The results show that using a neural network to predict residual forces can outperform INDI while using the combination of neural network and INDI can yield even better results than each method individually.
Kinodynamic Motion Planning for a Team of Multirotors Transporting a Cable-Suspended Payload in Cluttered Environments
Oct 05, 2023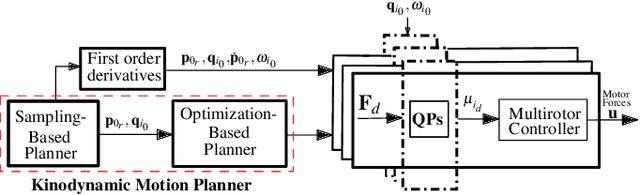



We propose a motion planner for cable-driven payload transportation using multiple unmanned aerial vehicles (UAVs) in an environment cluttered with obstacles. Our planner is kinodynamic, i.e., it considers the full dynamics model of the transporting system including actuation constraints. Due to the high dimensionality of the planning problem, we use a hierarchical approach where we first solve the geometric motion planning using a sampling-based method with a novel sampler, followed by constrained trajectory optimization that considers the full dynamics of the system. Both planning stages consider inter-robot and robot/obstacle collisions. We demonstrate in a software-in-the-loop simulation that there is a significant benefit in kinodynamic motion planning for such payload transport systems with respect to payload tracking error and energy consumption compared to the standard methods of planning for the payload alone. Notably, we observe a significantly higher success rate in scenarios where the team formation changes are needed to move through tight spaces.
Kidnapping Deep Learning-based Multirotors using Optimized Flying Adversarial Patches
Aug 01, 2023
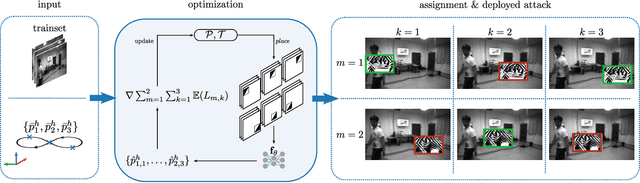
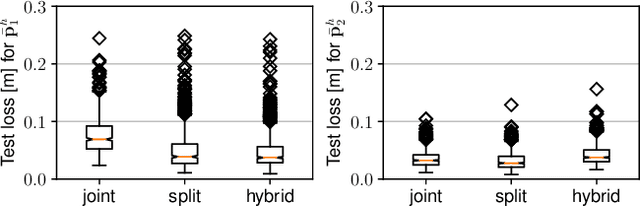
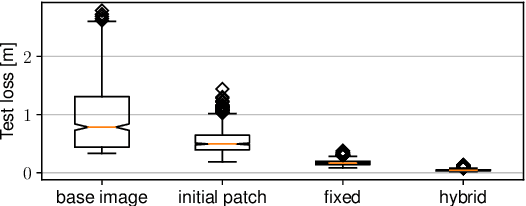
Autonomous flying robots, such as multirotors, often rely on deep learning models that makes predictions based on a camera image, e.g. for pose estimation. These models can predict surprising results if applied to input images outside the training domain. This fault can be exploited by adversarial attacks, for example, by computing small images, so-called adversarial patches, that can be placed in the environment to manipulate the neural network's prediction. We introduce flying adversarial patches, where multiple images are mounted on at least one other flying robot and therefore can be placed anywhere in the field of view of a victim multirotor. By introducing the attacker robots, the system is extended to an adversarial multi-robot system. For an effective attack, we compare three methods that simultaneously optimize multiple adversarial patches and their position in the input image. We show that our methods scale well with the number of adversarial patches. Moreover, we demonstrate physical flights with two robots, where we employ a novel attack policy that uses the computed adversarial patches to kidnap a robot that was supposed to follow a human.
Efficient Optimization-based Cable Force Allocation for Geometric Control of Multiple Quadrotors Transporting a Payload
Apr 05, 2023



We consider transporting a heavy payload that is attached to multiple quadrotors. The current state-of-the-art controllers either do not avoid inter-robot collision at all, leading to crashes when tasked with carrying payloads that are small in size compared to the cable lengths, or use computational demanding nonlinear optimization. We propose an extension to an existing efficient geometric payload transport controller to effectively avoid such collisions by designing an optimized cable force allocation method, and thus retaining the original stability properties. Our approach introduces a cascade of carefully designed quadratic programs that can be solved efficiently on highly constrained embedded flight controllers. We demonstrate our method on challenging scenarios with up to three small quadrotors with various payloads and cable lengths, with our controller running in real-time directly on the robots.