 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBITKOMO: Combining Sampling and Optimization for Fast Convergence in Optimal Motion Planning
Paper and Code

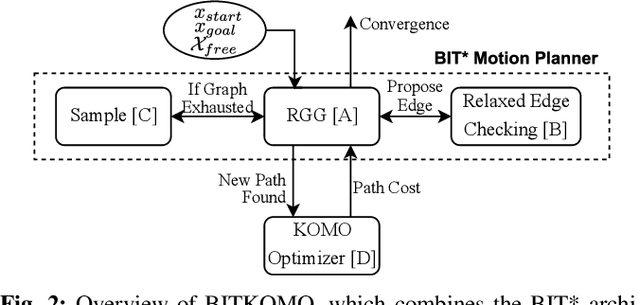

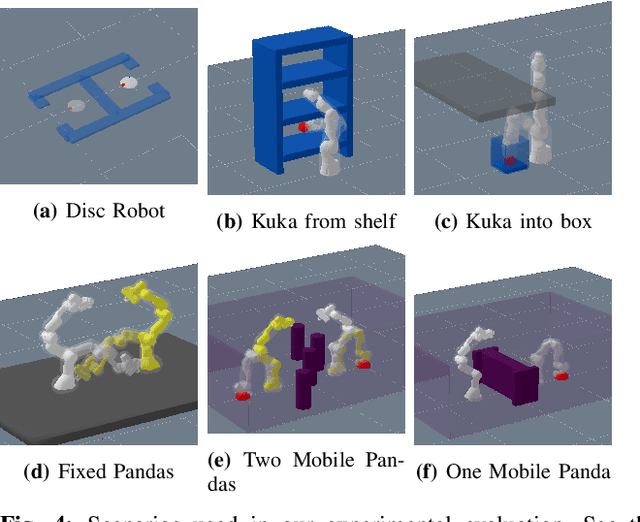
Optimal sampling based motion planning and trajectory optimization are two competing frameworks to generate optimal motion plans. Both frameworks have complementary properties: Sampling based planners are typically slow to converge, but provide optimality guarantees. Trajectory optimizers, however, are typically fast to converge, but do not provide global optimality guarantees in nonconvex problems, e.g. scenarios with obstacles. To achieve the best of both worlds, we introduce a new planner, BITKOMO, which integrates the asymptotically optimal Batch Informed Trees (BIT*) planner with the K-Order Markov Optimization (KOMO) trajectory optimization framework. Our planner is anytime and maintains the same asymptotic optimality guarantees provided by BIT*, while also exploiting the fast convergence of the KOMO trajectory optimizer. We experimentally evaluate our planner on manipulation scenarios that involve high dimensional configuration spaces, with up to two 7-DoF manipulators, obstacles and narrow passages. BITKOMO performs better than KOMO by succeeding even when KOMO fails, and it outperforms BIT* in terms of convergence to the optimal solution.