 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRecovering Parametric Scenes from Very Few Time-of-Flight Pixels
Sep 19, 2025



We aim to recover the geometry of 3D parametric scenes using very few depth measurements from low-cost, commercially available time-of-flight sensors. These sensors offer very low spatial resolution (i.e., a single pixel), but image a wide field-of-view per pixel and capture detailed time-of-flight data in the form of time-resolved photon counts. This time-of-flight data encodes rich scene information and thus enables recovery of simple scenes from sparse measurements. We investigate the feasibility of using a distributed set of few measurements (e.g., as few as 15 pixels) to recover the geometry of simple parametric scenes with a strong prior, such as estimating the 6D pose of a known object. To achieve this, we design a method that utilizes both feed-forward prediction to infer scene parameters, and differentiable rendering within an analysis-by-synthesis framework to refine the scene parameter estimate. We develop hardware prototypes and demonstrate that our method effectively recovers object pose given an untextured 3D model in both simulations and controlled real-world captures, and show promising initial results for other parametric scenes. We additionally conduct experiments to explore the limits and capabilities of our imaging solution.
Efficient Detection of Objects Near a Robot Manipulator via Miniature Time-of-Flight Sensors
Sep 19, 2025



We provide a method for detecting and localizing objects near a robot arm using arm-mounted miniature time-of-flight sensors. A key challenge when using arm-mounted sensors is differentiating between the robot itself and external objects in sensor measurements. To address this challenge, we propose a computationally lightweight method which utilizes the raw time-of-flight information captured by many off-the-shelf, low-resolution time-of-flight sensor. We build an empirical model of expected sensor measurements in the presence of the robot alone, and use this model at runtime to detect objects in proximity to the robot. In addition to avoiding robot self-detections in common sensor configurations, the proposed method enables extra flexibility in sensor placement, unlocking configurations which achieve more efficient coverage of a radius around the robot arm. Our method can detect small objects near the arm and localize the position of objects along the length of a robot link to reasonable precision. We evaluate the performance of the method with respect to object type, location, and ambient light level, and identify limiting factors on performance inherent in the measurement principle. The proposed method has potential applications in collision avoidance and in facilitating safe human-robot interaction.
Hierarchically Accelerated Coverage Path Planning for Redundant Manipulators
Feb 26, 2025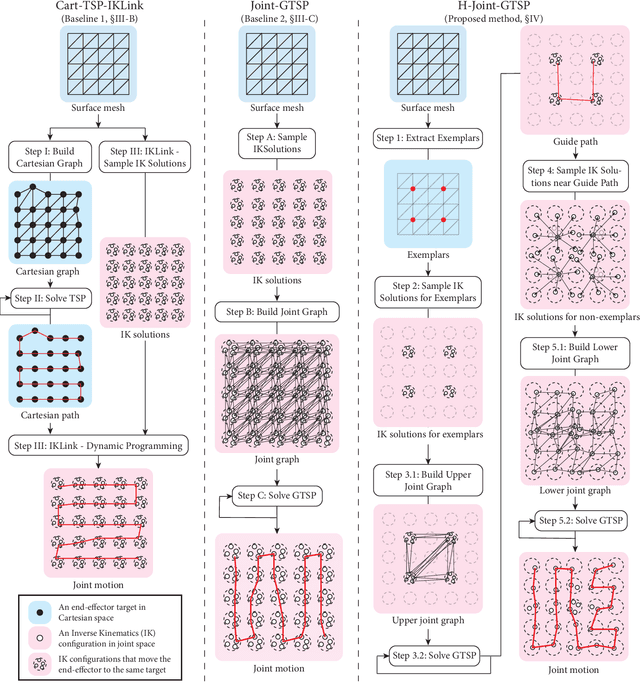
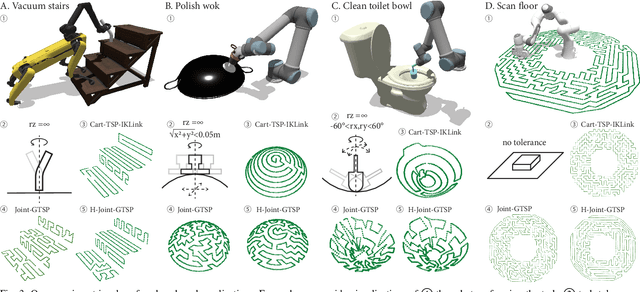
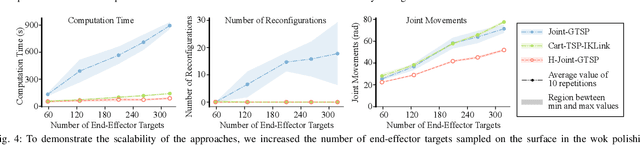
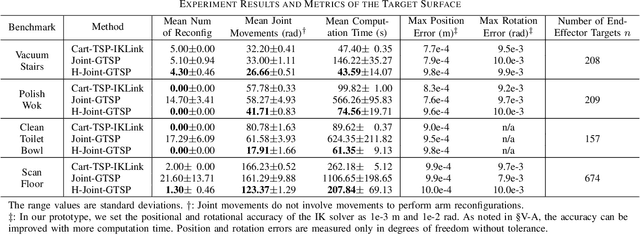
Many robotic applications, such as sanding, polishing, wiping and sensor scanning, require a manipulator to dexterously cover a surface using its end-effector. In this paper, we provide an efficient and effective coverage path planning approach that leverages a manipulator's redundancy and task tolerances to minimize costs in joint space. We formulate the problem as a Generalized Traveling Salesman Problem and hierarchically streamline the graph size. Our strategy is to identify guide paths that roughly cover the surface and accelerate the computation by solving a sequence of smaller problems. We demonstrate the effectiveness of our method through a simulation experiment and an illustrative demonstration using a physical robot.
Anytime Planning for End-Effector Trajectory Tracking
Feb 05, 2025



End-effector trajectory tracking algorithms find joint motions that drive robot manipulators to track reference trajectories. In practical scenarios, anytime algorithms are preferred for their ability to quickly generate initial motions and continuously refine them over time. In this paper, we present an algorithmic framework that adapts common graph-based trajectory tracking algorithms to be anytime and enhances their efficiency and effectiveness. Our key insight is to identify guide paths that approximately track the reference trajectory and strategically bias sampling toward the guide paths. We demonstrate the effectiveness of the proposed framework by restructuring two existing graph-based trajectory tracking algorithms and evaluating the updated algorithms in three experiments.
Augmenting a Large Language Model with a Combination of Text and Visual Data for Conversational Visualization of Global Geospatial Data
Jan 16, 2025

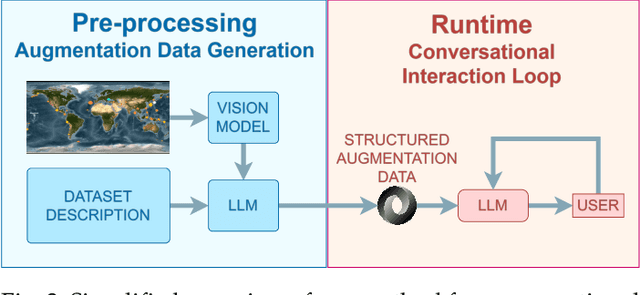

We present a method for augmenting a Large Language Model (LLM) with a combination of text and visual data to enable accurate question answering in visualization of scientific data, making conversational visualization possible. LLMs struggle with tasks like visual data interaction, as they lack contextual visual information. We address this problem by merging a text description of a visualization and dataset with snapshots of the visualization. We extract their essential features into a structured text file, highly compact, yet descriptive enough to appropriately augment the LLM with contextual information, without any fine-tuning. This approach can be applied to any visualization that is already finally rendered, as long as it is associated with some textual description.
Using a Distance Sensor to Detect Deviations in a Planar Surface
Aug 07, 2024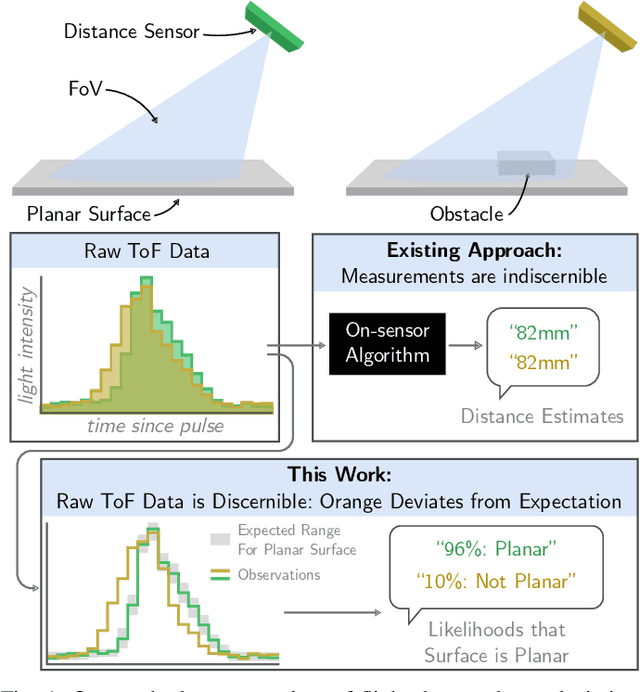
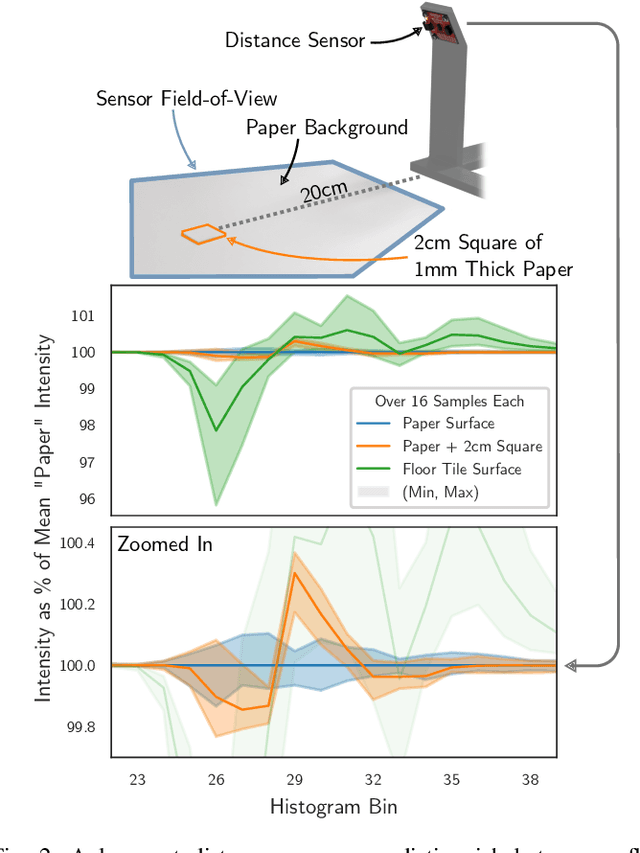
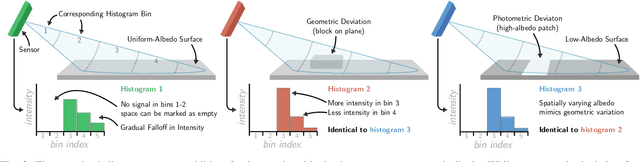
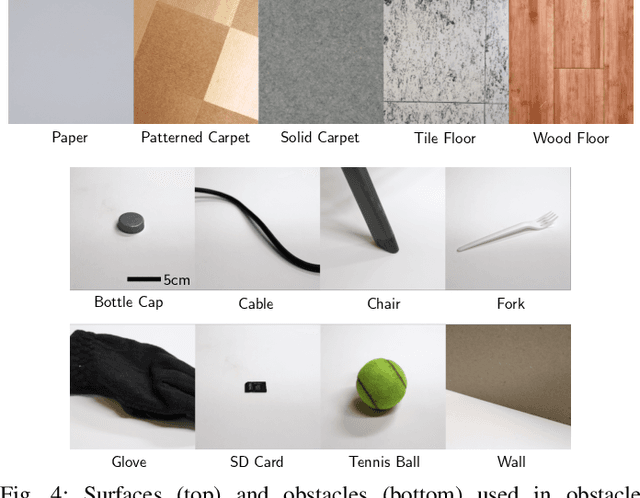
We investigate methods for determining if a planar surface contains geometric deviations (e.g., protrusions, objects, divots, or cliffs) using only an instantaneous measurement from a miniature optical time-of-flight sensor. The key to our method is to utilize the entirety of information encoded in raw time-of-flight data captured by off-the-shelf distance sensors. We provide an analysis of the problem in which we identify the key ambiguity between geometry and surface photometrics. To overcome this challenging ambiguity, we fit a Gaussian mixture model to a small dataset of planar surface measurements. This model implicitly captures the expected geometry and distribution of photometrics of the planar surface and is used to identify measurements that are likely to contain deviations. We characterize our method on a variety of surfaces and planar deviations across a range of scenarios. We find that our method utilizing raw time-of-flight data outperforms baselines which use only derived distance estimates. We build an example application in which our method enables mobile robot obstacle and cliff avoidance over a wide field-of-view.
Beware of Validation by Eye: Visual Validation of Linear Trends in Scatterplots
Jul 16, 2024



Visual validation of regression models in scatterplots is a common practice for assessing model quality, yet its efficacy remains unquantified. We conducted two empirical experiments to investigate individuals' ability to visually validate linear regression models (linear trends) and to examine the impact of common visualization designs on validation quality. The first experiment showed that the level of accuracy for visual estimation of slope (i.e., fitting a line to data) is higher than for visual validation of slope (i.e., accepting a shown line). Notably, we found bias toward slopes that are "too steep" in both cases. This lead to novel insights that participants naturally assessed regression with orthogonal distances between the points and the line (i.e., ODR regression) rather than the common vertical distances (OLS regression). In the second experiment, we investigated whether incorporating common designs for regression visualization (error lines, bounding boxes, and confidence intervals) would improve visual validation. Even though error lines reduced validation bias, results failed to show the desired improvements in accuracy for any design. Overall, our findings suggest caution in using visual model validation for linear trends in scatterplots.
Motion Comparator: Visual Comparison of Robot Motions
Jul 03, 2024



Roboticists compare robot motions for tasks such as parameter tuning, troubleshooting, and deciding between possible motions. However, most existing visualization tools are designed for individual motions and lack the features necessary to facilitate robot motion comparison. In this paper, we utilize a rigorous design framework to develop Motion Comparator, a web-based tool that facilitates the comprehension, comparison, and communication of robot motions. Our design process identified roboticists' needs, articulated design challenges, and provided corresponding strategies. Motion Comparator includes several key features such as multi-view coordination, quaternion visualization, time warping, and comparative designs. To demonstrate the applications of Motion Comparator, we discuss four case studies in which our tool is used for motion selection, troubleshooting, parameter tuning, and motion review.
Enhancing Text Corpus Exploration with Post Hoc Explanations and Comparative Design
Jun 14, 2024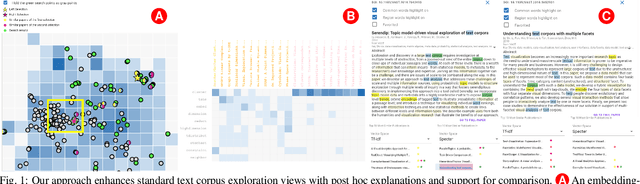
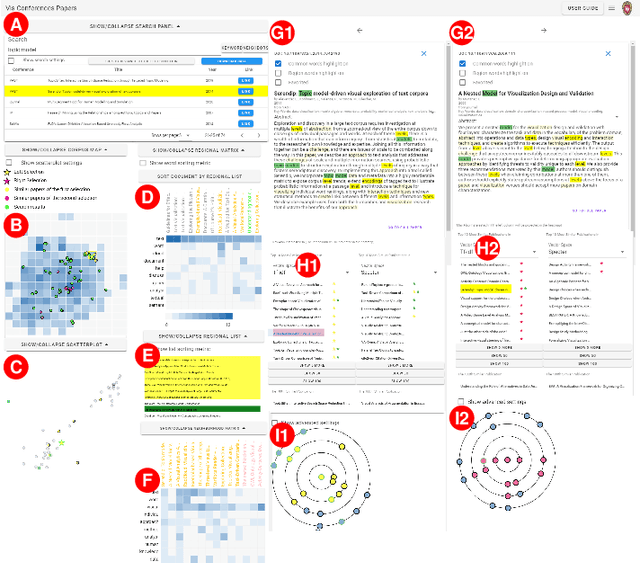
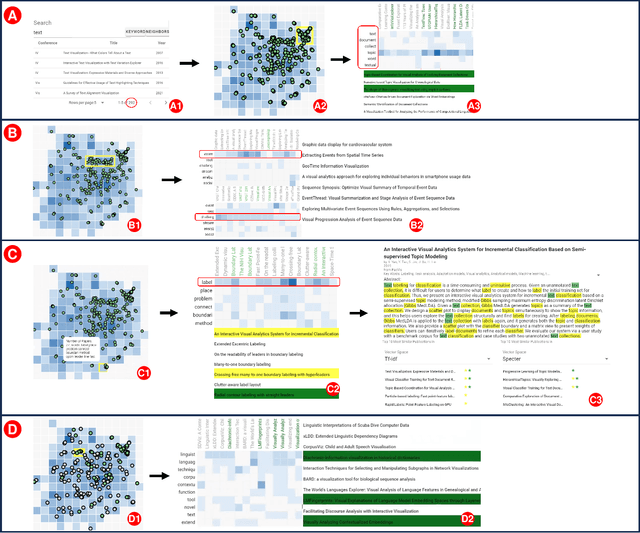
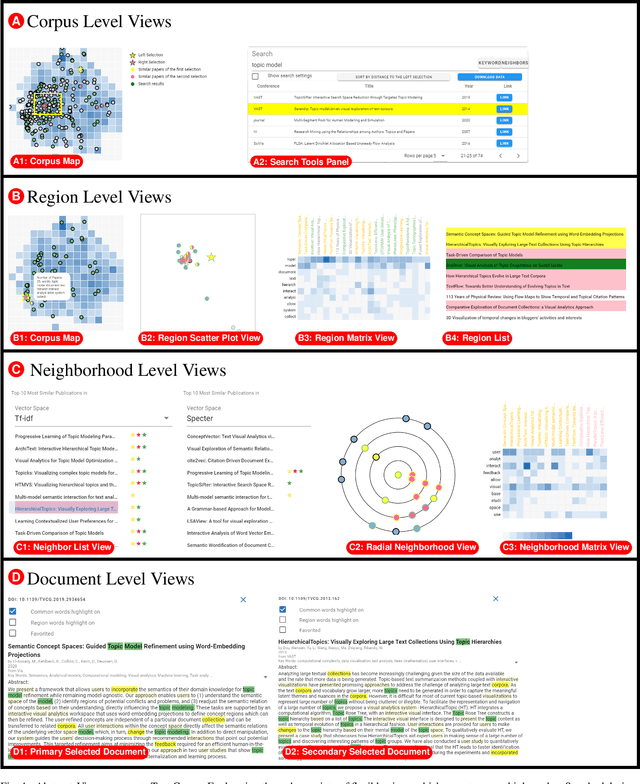
Text corpus exploration (TCE) spans the range of exploratory search tasks: it goes beyond simple retrieval to include item discovery and learning about the corpus and topic. Systems support TCE with tools such as similarity-based recommendations and embedding-based spatial maps. However, these tools address specific tasks; current systems lack the flexibility to support the range of tasks encountered in practice and the iterative, multiscale, workflows users employ. In this paper, we provide methods that enhance TCE tools with post hoc explanations and multiscale, comparative designs to provide flexible support for user needs. We introduce salience functions as a mechanism to provide post hoc explanations of similarity, recommendations, and spatial placement. This post hoc strategy allows our approach to complement a variety of underlying algorithms; the salience functions provide both exemplar- and feature-based explanations at scales ranging from individual documents through to the entire corpus. These explanations are incorporated into a set of views that operate at multiple scales. The views use design elements that explicitly support comparison to enable flexible integration. Together, these form an approach that provides a flexible toolset that can address a range of tasks. We demonstrate our approach in a prototype system that enables the exploration of corpora of paper abstracts and newspaper archives. Examples illustrate how our approach enables the system to flexibly support a wide range of tasks and workflows that emerge in user scenarios. A user study confirms that researchers are able to use our system to achieve a variety of tasks.
Towards 3D Vision with Low-Cost Single-Photon Cameras
Mar 29, 2024



We present a method for reconstructing 3D shape of arbitrary Lambertian objects based on measurements by miniature, energy-efficient, low-cost single-photon cameras. These cameras, operating as time resolved image sensors, illuminate the scene with a very fast pulse of diffuse light and record the shape of that pulse as it returns back from the scene at a high temporal resolution. We propose to model this image formation process, account for its non-idealities, and adapt neural rendering to reconstruct 3D geometry from a set of spatially distributed sensors with known poses. We show that our approach can successfully recover complex 3D shapes from simulated data. We further demonstrate 3D object reconstruction from real-world captures, utilizing measurements from a commodity proximity sensor. Our work draws a connection between image-based modeling and active range scanning and is a step towards 3D vision with single-photon cameras.